在现实世界中直接开展在线策略学习,是具身智能领域一个前景广阔却颇具挑战的方向。与仿真环境不同,现实世界中的系统无法随意加速、低成本重置或大规模复制,这使得可扩展的数据收集、异构部署以及长期有效的训练变得困难重重。这些挑战表明,现实世界中的策略学习不仅是一个算法问题,从根本上说更是一个系统问题。
近日,清华大学于超老师团队正式推出RLinf-USER,为行业解决了这一痛点!
-
🌟 首个统一系统:将物理机器人提升为与 GPU 同等的计算资源,打破硬件隔阂。 -
⚡️ 极致效率:全异步架构将真实世界训练吞吐量提升 5.7 倍。 -
🤖 异构协同:让不同品牌、不同构型的机器人(如 Franka + ARX)在同一模型下协同进化。 -
🧠 大模型支持:原生支持 VLA(如PI0)的云边端在线微调。
Code: https://github.com/RLinf/RLinf
论文链接:https://arxiv.org/abs/2602.07837
01. 背景:当 AI 撞上物理世界的墙
在具身智能的浪潮中,我们已经见证了仿真训练的巨大成功。然而,当我们试图将智能带入真实世界时,却撞上了一堵看不见的墙:
-
时间无法加速:物理世界没有 100 倍速的快进键,数据采集极其昂贵。 -
系统支离破碎:训练在云端,控制在边缘,中间隔着不稳定的网络;机器人被视为难以管理的“外设”,而非计算资源。 -
数据稍纵即逝:一旦发生故障或网络中断,昂贵的长序列数据往往付诸东流。
真实世界的策略学习(Real-World Policy Learning),不仅是算法的挑战,更是系统的挑战。
今天,我们正式介绍 RLinf-USER —— 一个专为真实世界在线策略学习打造的统一且可扩展的系统。它不只是一个训练框架,更是连接数字大脑与物理躯体的“神经系统”,是实现千台机器人物理世界策略进化的关键一环。
02. RLinf-USER 是什么?
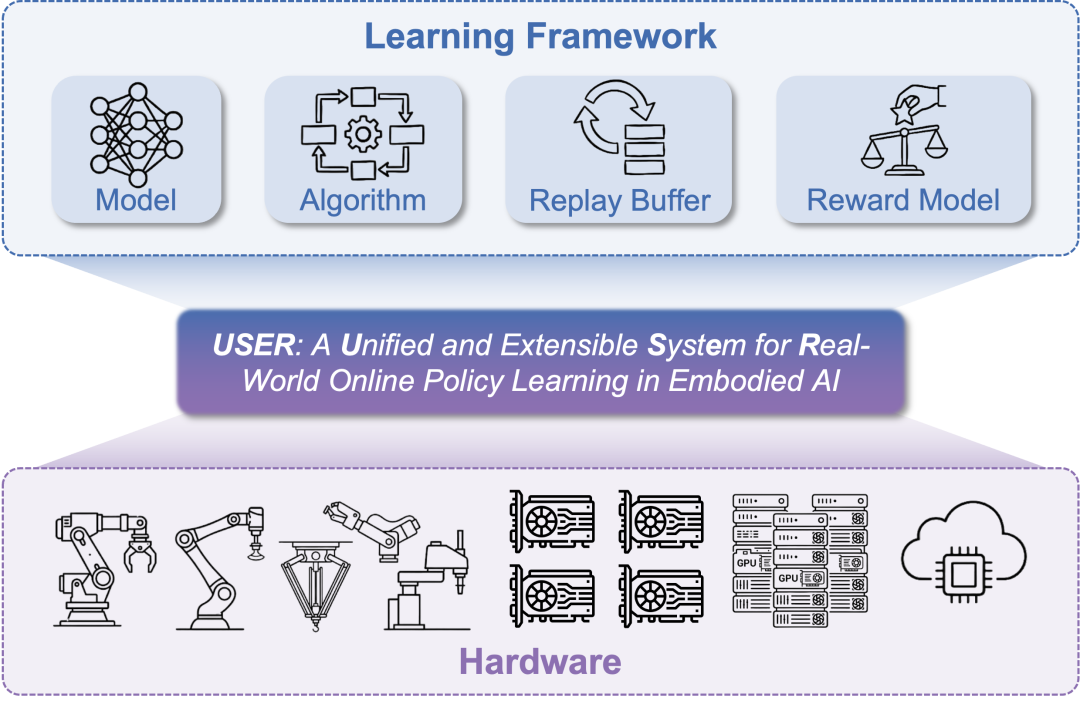
RLinf-USER (Unified and Extensible SystEm for Real-World Online Policy Learning) 是基于 RLinf 基础设施构建的专用系统。它的核心理念只有一个:将物理世界的复杂性,封装为简洁的计算流。
系统设计:
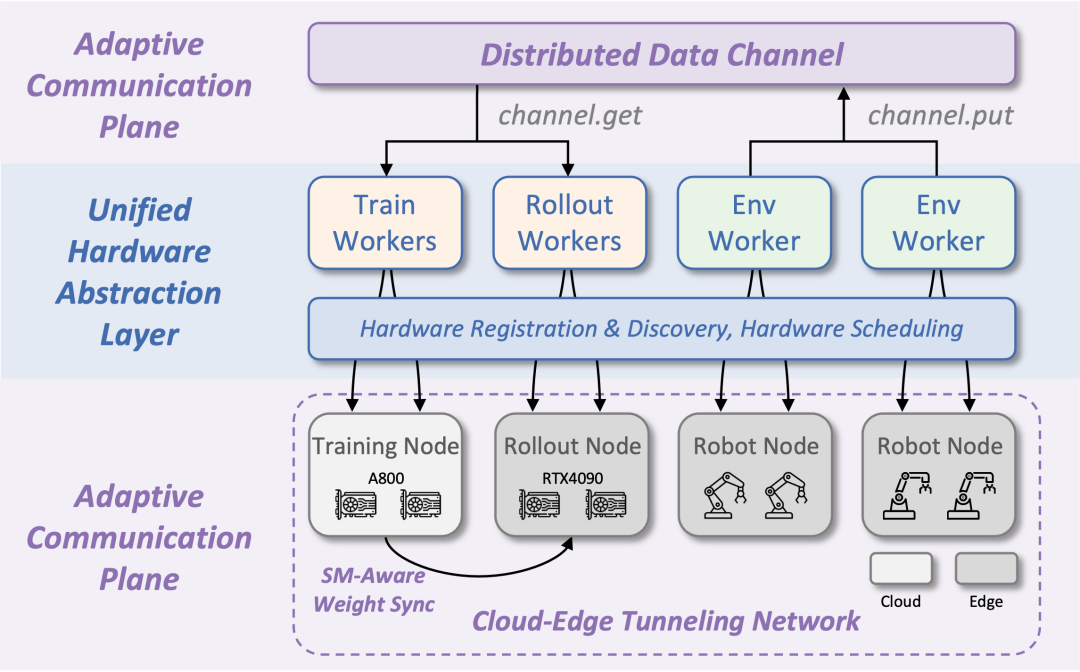
🤖 设计1. 机器人即计算 (Robot as Compute)
RLinf首次提出“像使用GPU一样使用机器人”的概念。在 RLinf-USER 中,机器人不再是游离于集群之外的“设备”。通过统一硬件抽象层 (HAL),物理机器人被虚拟化为与 GPU/TPU 同等的可调度资源。
-
自动发现:像插上显卡一样,系统自动识别接入的机器人。 -
统一调度:无论是 7 自由度的机械臂,还是 4090 显卡,都在同一个资源池中被统一编排。
🌐 设计2. 云边端无缝协同 (Adaptive Cloud-Edge Link)
大模型在云端,机器人在边缘。RLinf-USER 构建了一个自适应通信平面:
-
隧道穿透:无论机器人身处防火墙后还是复杂内网中,隧道技术都能建立直达云端的专线。 -
流量本地化:智能的分布式数据通道,只传输必要的训练样本,将海量原始观测数据截流在边缘,无惧带宽瓶颈。
学习框架设计:
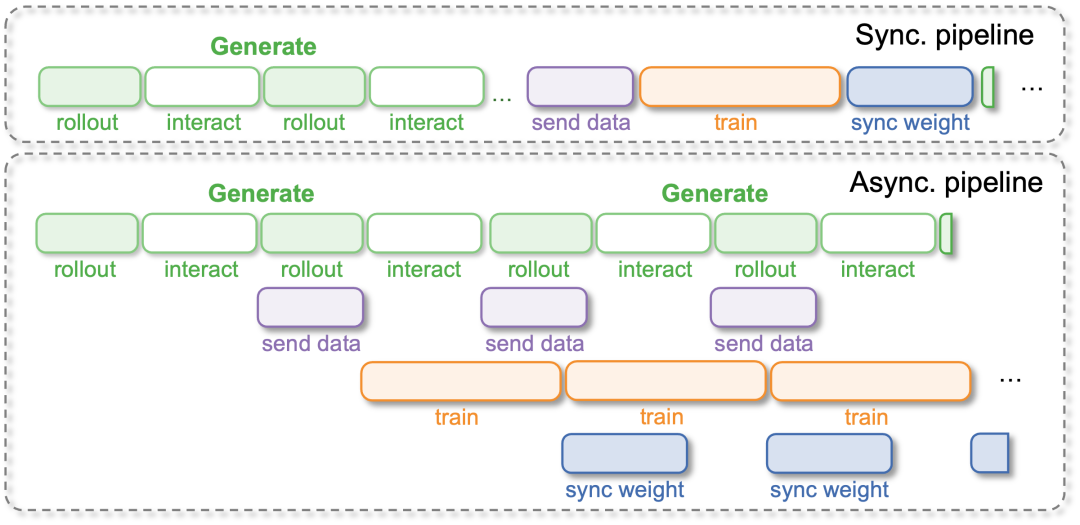
⚡️ 设计3. 全异步进化引擎 (Fully Asynchronous Pipeline)
真实世界不能等待。传统的“采集-训练”同步循环会让机器人把大量时间浪费在等待计算上。 RLinf-USER 采用了全异步流水线设计:
-
永不停歇:机器人在持续工作,GPU 在持续计算,网络在持续更新。三个进程完全解耦,互不等待。 -
极致吞吐:在 VLA 模型训练中,这种设计将整体吞吐量提升了 5.70 倍!这意味着在同样的物理时间内,你的机器人能多学 5 倍的经验。
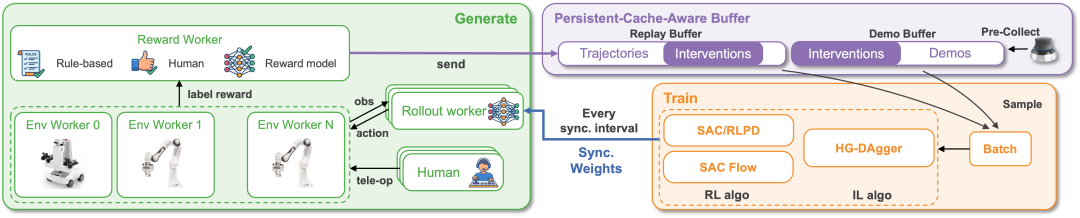
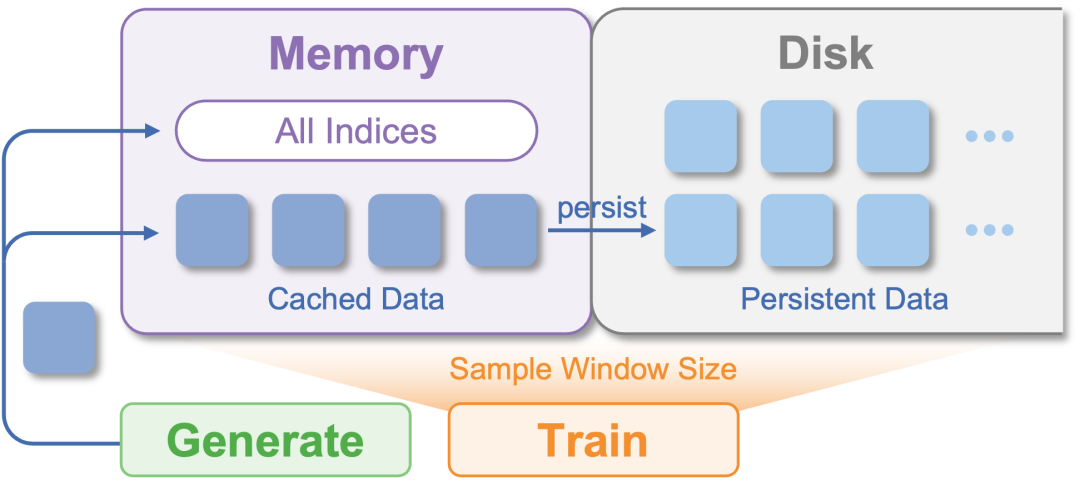
💾 设计4. 数据的“时光机” (Persistent-Cache-Aware Buffer)
我们设计了持久化缓存感知缓冲区:
-
无限记忆:打破内存限制,支持 TB 级甚至 PB 级的历史轨迹存储。 -
崩溃恢复:即使实验意外中断,数据和状态也能毫发无损,支持长达数周的连续训练。
🧠 设计5. 丰富的在线学习组件支持
USER在统一的接口下,支持了多样的学习组件,模块化的设计易于二次开发:
-
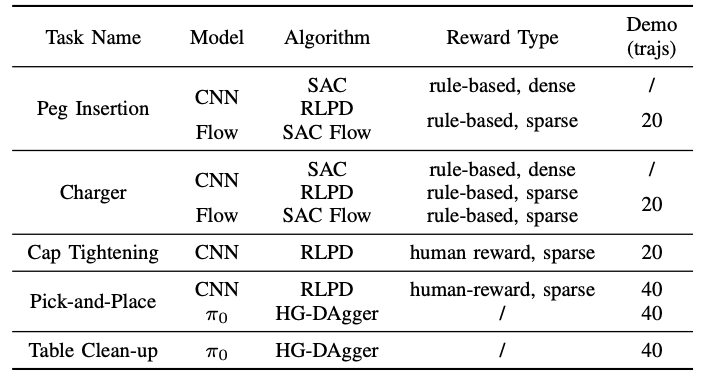
模型支持:CNN model,Flow matching model,VLA(如PI0) -
算法支持:强化学习(如SAC、SAC Flow)、模仿学习(如HG-DAgger) -
奖励函数支持:规则奖励、人工奖励、奖励模型
03. 硬核实战:它能做到什么?
RLinf-USER 在5个真实任务中证明了效率和性能。
🏆 战绩一:VLA 大模型的在线进化
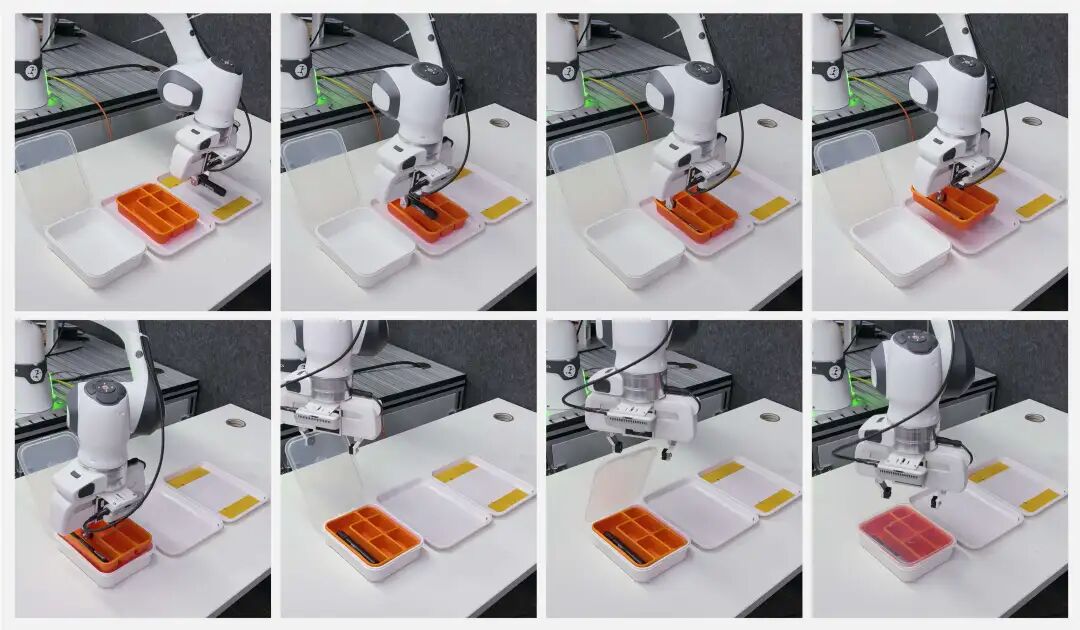
这是目前少有的支持 3B 参数 VLA 模型(PI0)在真实世界进行在线微调的系统。
-
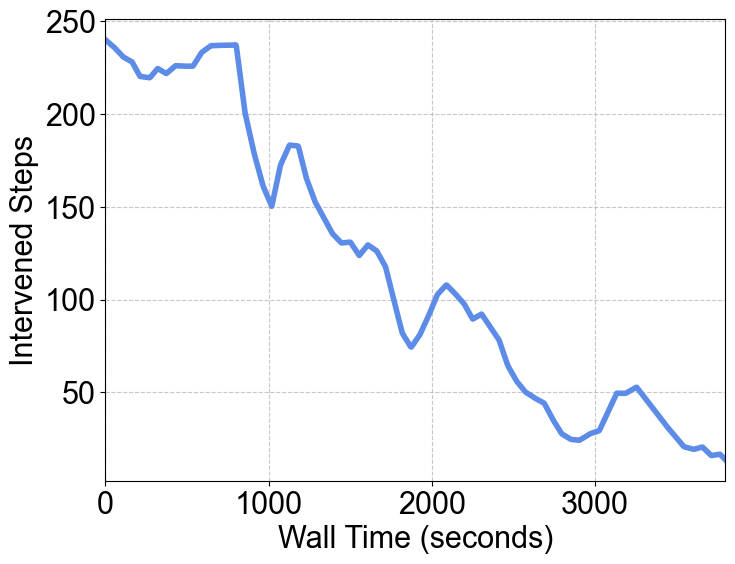
任务:桌面清理(Table Clean-up)—— 一个包含分类、抓取、放置、关盖的长序列任务。 -
结果:通过 HG-DAgger 算法,模型成功率从 45% 飙升至 80%。随着训练进行,人工干预次数显著下降,机器人逐渐学会了独立思考。
🤝 战绩二:异构机器人“大一统”
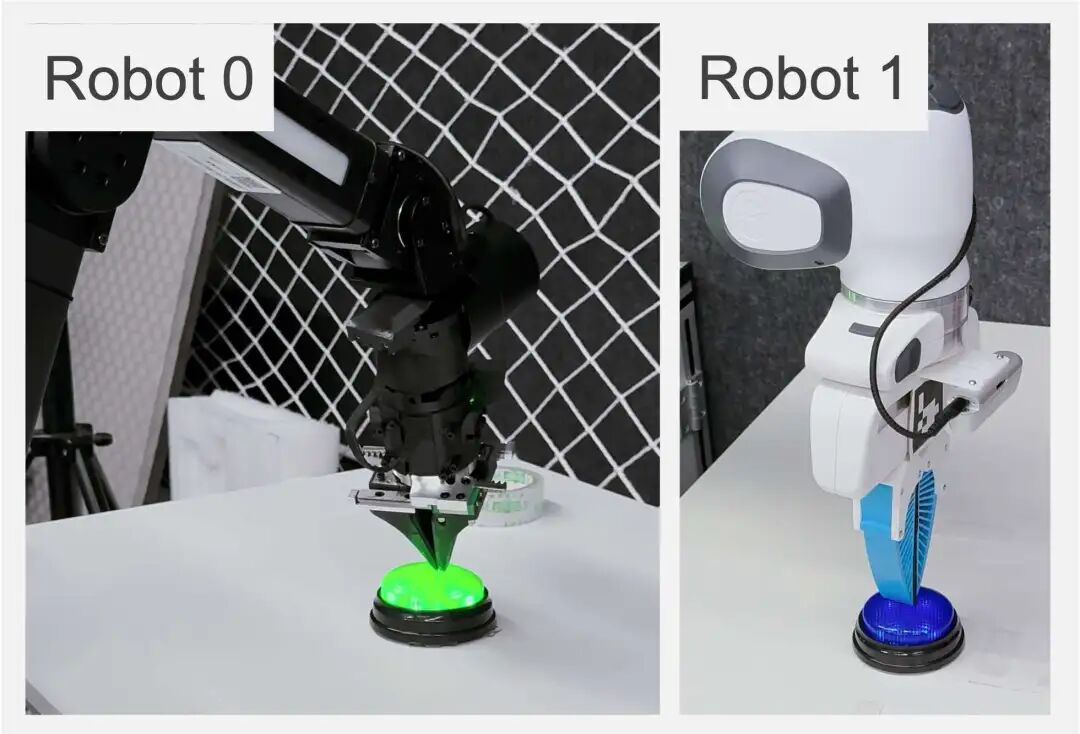
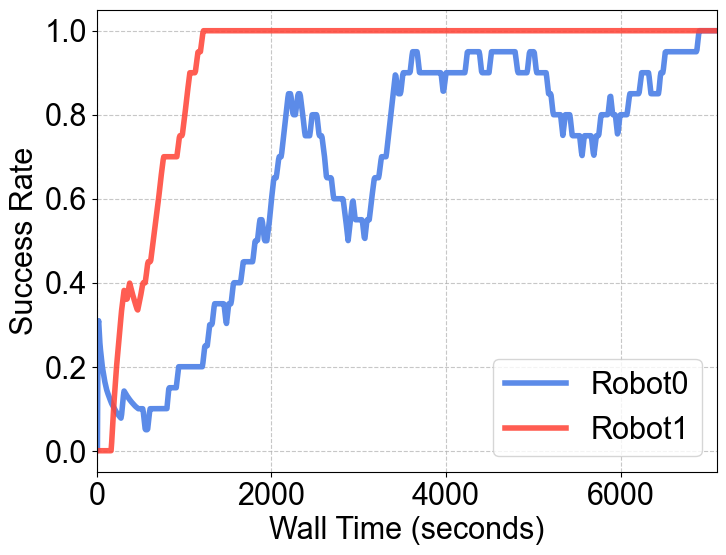
RLinf-USER 完成了一项极具挑战的实验:让两种完全不同的机器人一起学习。
-
组合:高端的 7-DoF Franka 机械臂 + 低成本的 6-DoF ARX 机械臂。 -
效果:尽管它们的构型、关节数、摄像头参数截然不同,但在 USER 的统一抽象下,它们共同为一个策略贡献数据。最终,同一个模型学会了控制这两种截然不同的“身体”。
☁️ 战绩三:跨越千里的“云-边”协同
针对大模型训练算力在云端、机器人执行在边缘端的典型场景,RLinf-USER 克服了物理距离和网络隔离的障碍。
-
挑战:训练节点位于北京(云端),而机器人和推理节点位于数千公里外的深圳(边缘端),中间隔着高延迟、带宽受限且复杂的公网环境。 -
效果:得益于 USER 的隧道网络技术(Tunneling-based Networking)和分布式数据通道,跨域通信的效率大幅提升。实验数据显示,在跨域部署下,单集(Episode)数据的生成时间缩短了约 3 倍(从 ~69秒 降至 ~22秒),实现了如同在局域网般流畅的远程分布式训练。

⏱️ 战绩四:异步vs同步架构速度的碾压
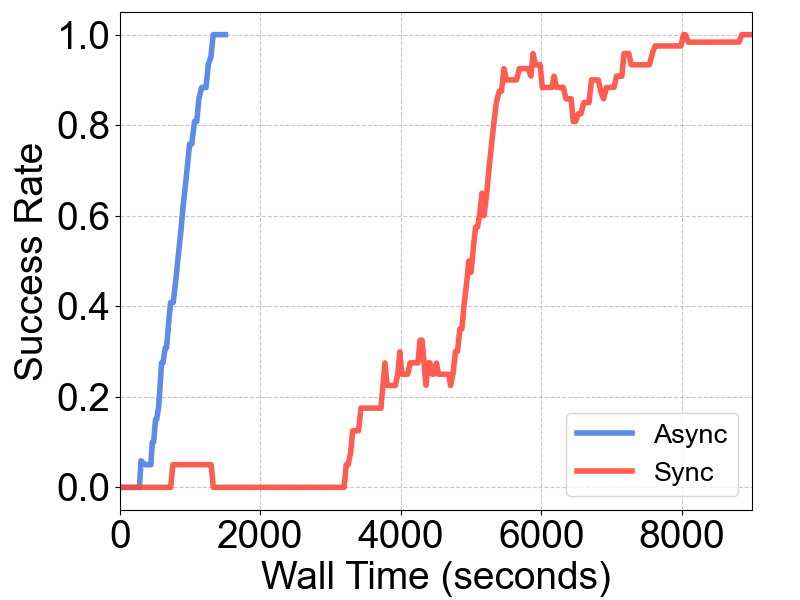
在经典的插孔(Peg Insertion)任务中:
-
传统同步架构:收敛需要 8000+ 秒。 -
RLinf-USER:收敛仅需 约 1500 秒。
效率提升超过 5 倍,让原本漫长的训练过程变得立等可取。
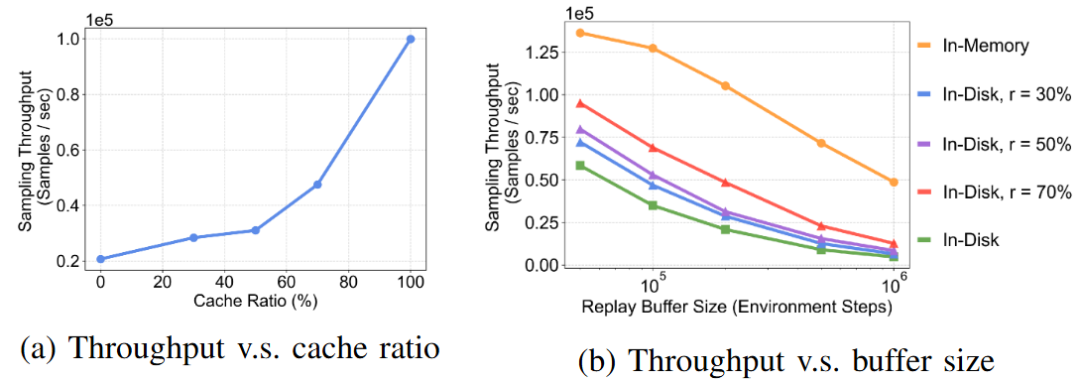
💾 战绩五:打破“内存墙”,数据的无限记忆与极速吞吐
在真实世界长周期(Long-horizon)的训练中,数据是极其宝贵的资产。针对传统 Buffer “存不下”或“读得慢”的痛点,RLinf-USER 拒绝妥协。
-
机制: RLinf-USER 独创了 **持久化缓存感知 Buffer (Persistent-Cache-Aware Buffer)**,通过智能索引机制,将海量历史数据异步落盘,同时在内存中保留高频热点数据(Cache)。 -
效果: 这是一个“鱼和熊掌兼得”的方案。实验评测显示,RLinf-USER 在提供 磁盘级“无限”容量(支持 TB 级历史数据回溯)的同时,实现了 显著优于纯磁盘存储的采样吞吐量。同样关键的是,它自带崩溃恢复能力,即使实验因故障意外中断,长期积累的宝贵数据也能毫发无损,随时重启“再战”。
04. 为什么选择 RLinf-USER?
如果说 ChatGPT 是 AI 在数字世界的里程碑,那么 RLinf-USER 致力于成为具身智能在物理世界的基石。
✅ 如果你是研究者:它兼容 CNN、Flow-based policy、VLA 等多种策略,支持 RL、IL、Human-in-the-loop 等各种算法。它将模型、算法等模块解耦,简化开发难度。
✅ 如果你是工程师:它提供了工业级的稳定性(崩溃恢复)和扩展性(自动硬件发现),让大规模机器人集群管理变得像管理服务器一样简单。
此时此刻,机器人不再只是外设。RLinf-USER,让智能真正“具身”。
写在最后
RLinf 发布半年,Github Star 2.5k+,得到了学术界和工业界的广泛认可,达成了多项战略合作,包括英伟达IssacLab、原力灵机Dexbotic等,更多家合作官宣也会尽快和大家见面。道阻且长,26年RLinf仍在为搭建更好的具身智能基础设施而努力,并持续做好可复现生态。
团队也开放招生和招聘,欢迎大家联系于超老师(邮件:zoeyuchao@gmail.com)










