点击下方卡片,关注【Xbotics具身智能实验室】公众号
更多具身干货,欢迎加入(戳我)
👉具身智能学习资料汇总:https://github.com/Xbotics-Embodied-AI-club/Xbotics-Embodied-Guide
👉具身智能求职/实习信息汇总:https://github.com/Xbotics-Embodied-AI-club/Xbotics-Embodied-AI-Job
你想要的这里都有~~

当大模型开始从“会回答问题”走向“会执行任务”,机器人也正在从“单机设备”走向“可被 Agent 调度的物理执行器”。
今天,越来越多开发者开始意识到,真正重要的已经不只是“让机器人接上一个大模型”,而是要进一步思考:
OpenClaw 这样的 Agent 平台,究竟该如何真正进入机器人系统?
机器人,又该如何从一个硬件设备,变成 Agent 可调用、可复用、可编排的能力集合?
基于这个方向,Xbotics 社区正式发起一场圆桌讨论:
OpenClaw 负责解释和规划世界,而具身智能负责创造世界
—— OpenClaw × Robot 的技术路径、工程挑战与真实落地
这不仅是一场观点交流,更是一场围绕真实项目实践展开的讨论。
我们希望和更多开发者一起,把 OpenClaw + Robot 这件事从概念聊到工程,从想法推进到实际落地。
为什么发起这场圆桌?
最近,围绕 OpenClaw + Robot,社区已经出现了一批非常有代表性的探索。
有同学开始尝试:
把不同机器人通过统一能力抽象接入 OpenClaw; 把机械臂控制、视觉流、状态查询做成标准化后端服务; 在家庭机器人、教学机器人等轻量平台上跑通 Agent 控制闭环。
这些探索说明了一件事:
❝OpenClaw + Robot 不是一个停留在想象中的方向,而是已经进入工程实践阶段。
但与此同时,大家也都在面对一些非常现实的问题:
机器人能力到底该怎么抽象,Agent 才能稳定调用? 是直接接 ROS,还是通过 REST / WebSocket 做服务层? Skill 应该怎么设计,才能既通用又不失控? 机器人后端应该服务化到什么程度,才适合接入 Agent? 家庭机器人、机械臂、移动机器人,能否共享一套 OpenClaw 思路? 从 demo 到真实落地,中间最大的门槛到底是什么?
也正因为这些问题足够新、足够重要,也足够值得一起碰撞,我们决定围绕这个主题发起一次专门的圆桌讨论。
这场圆桌想聊什么?
这次圆桌会聚焦一个核心问题:
当 Agent 开始进入机器人,什么样的系统架构,才能支撑真正的落地?
我们会重点围绕以下几个方向展开讨论:
1)OpenClaw 在机器人系统里适合扮演什么角色?
它是一个聊天入口?一个任务编排器?一个技能调度中枢?还是更像“机器人上层操作系统”?
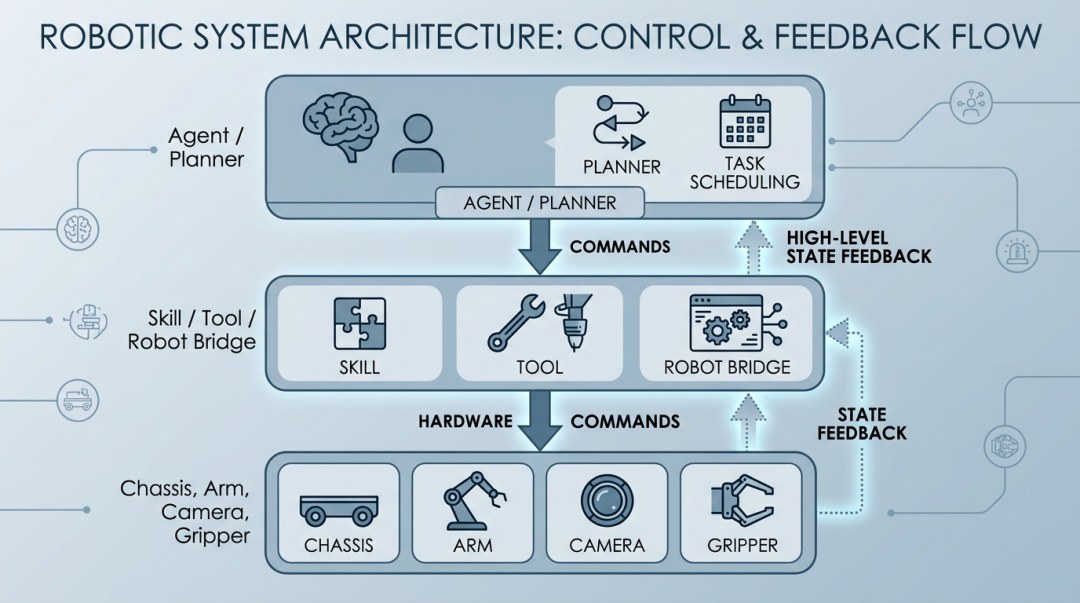
2)机器人应该如何被 Agent 理解?
底盘、机械臂、夹爪、相机、视觉、状态、任务流,是否需要一套统一的语义接口?
3)OpenClaw + Robot 的最佳接入方式是什么?
是直接对接 ROS?
是通过 REST / WebSocket 做服务化中间层?
还是需要专门做一层 Robot Bridge?
4)Skill / Tool / Workflow 应该怎么设计?
机器人和纯软件工具不同,它有时延、有风险、有状态、有失败恢复,这些特性如何进入 Agent 设计?
5)从 demo 到真实应用,最卡人的问题是什么?
是硬件能力不够?后端不够清晰?抽象层缺失?还是缺少社区协作和经验复用?
6)OpenClaw + Robot 最先会在哪些场景爆发?
机械臂抓取、移动操作、家庭机器人、巡检机器人、教学平台、开发者工具链,哪些更适合率先落地?

这次圆桌会怎么进行?
本次圆桌将采用 “项目分享 + 讨论交流” 的形式展开。
主持人:Xbotics 社区负责人 木木老师 分享嘉宾:3 位已经在尝试 OpenClaw + Robot 方向的同学 讨论方式:先进行各自项目思路与实践分享,再围绕共性问题展开讨论
相比于泛泛而谈的趋势分析,这次圆桌更关注:
大家到底做了什么; 遇到了哪些真实问题; 为什么这样设计; 哪些方案是可复用的; 哪些问题值得作为社区长期推进的方向。
也就是说,这场讨论不是空讲概念,而是希望基于真实尝试,把 OpenClaw + Robot 的技术路径和工程问题真正聊清楚。
活动信息
圆桌主题:
OpenClaw 负责解释和规划世界,而具身智能负责创造世界
副标题:
OpenClaw × Robot 的技术路径、工程挑战与真实落地
时间:
3 月 15 日(周日)下午 2:00
形式:
【可补充:线上直播 / 飞书会议 / 社群直播】
主持人:
木木老师(Xbotics 社区负责人)
分享与讨论嘉宾:
3 位正在尝试 OpenClaw + Robot 项目的同学
活动定位:
围绕真实项目实践,探讨 OpenClaw 与机器人结合的系统架构、工程难点与落地路径。
为什么这场讨论值得关注?
因为这不只是一次“工具讨论”,它背后其实对应着一个更大的判断:
❝未来真正有价值的,不只是会说话的 Agent,也不只是会执行动作的机器人,而是一个能理解目标、规划流程、调用技能,并真正作用于物理世界的完整系统。
换句话说:
OpenClaw 负责解释世界、规划世界; 具身智能负责进入世界、作用世界、创造世界。
这也是为什么我们觉得,这个方向值得单独做成一个长期专栏、长期社区、长期讨论方向。
过去,我们更多是在做“控制系统”。
未来,我们会越来越多地去做“能力系统”“技能系统”“工作流系统”。
这场圆桌,想讨论的正是这些新的系统问题。
这次圆桌也和 Xbotics 社区正在做的事情密切相关
围绕 OpenClaw + Robot,Xbotics 社区已经开始系统推进几个方向:
策划 OpenClaw + Robot 项目专栏,持续整理社区成员的实践项目; 推动不同机器人接入 OpenClaw 的方法沉淀; 总结能力抽象、Skill 设计、工作流编排、服务化后端等最佳实践; 建设 OpenClaw + Robot 飞书群,推动真实问题讨论与项目共建; 希望逐步把这个方向做成一个长期可积累、可复用、可协作的开发者社区。
这次圆桌,也是这个过程中的一个重要节点。
我们不想只停留在“看项目、转文章、聊趋势”,而是希望真正推动:
❝OpenClaw + Robot 的实际应用落地。
适合谁来参加?
这场讨论尤其适合以下几类朋友:
正在做 机械臂、移动机器人、巡检机器人、家庭机器人 的开发者; 正在研究 Agent、Skill、Workflow、Tool Calling 的工程师; 对 机器人中间层、能力抽象、服务化架构 感兴趣的同学; 想把 OpenClaw 接到自己机器人上 的团队或个人; 想了解 OpenClaw + Robot 最新社区实践的开发者; 希望参与这个方向共建、交流、投稿、合作的朋友。
不管你现在是在做机器人本体、感知控制、后端服务、Agent 平台、工作流编排,还是在做开源社区与项目协作,都非常欢迎你参与这场讨论。
我们期待这场圆桌带来什么?
我们希望这次讨论至少能推动三件事。
1)把方向讲清楚
让更多人理解,为什么 OpenClaw + Robot 值得被当作一个独立方向长期做下去。
2)把问题讲透
把真实工程问题摆出来,而不是停留在概念层面的想象。
3)把社区做起来
让关注这个方向的人真正连接起来,一起做项目、做专栏、做知识库、做实践社区。
因为我们相信,这个方向最需要的不是一次热闹讨论,而是:
❝一群愿意长期交流、共建、开源、落地的人。
欢迎加入我们的 OpenClaw + Robot 飞书群
如果你也在关注这些方向:
想把 OpenClaw 接到自己的机器人 上; 想做 Agent + 机械臂 / 底盘 / 相机 / 夹爪 的真实项目; 想交流 统一能力抽象、Skill 设计、后端服务化、工作流编排; 想一起推动 OpenClaw + Robot 从 demo 走向真实落地;
欢迎加入我们的 OpenClaw + Robot 飞书群。

这里会持续交流:
OpenClaw 接机器人实战经验 不同机器人平台的接入方案 Skill / Workflow 设计思路 后端服务化与桥接框架 项目专栏共建与投稿 社区活动、圆桌、分享会信息
我们希望把这里做成:
OpenClaw + Robot 的第一社区
一起推进 OpenClaw + Robot 从概念走向工程,从 demo 走向实际应用。

结语
机器人时代正在发生一个非常重要的变化。
过去,我们更关注“机器人能不能动”;
未来,我们会越来越关注“机器人能不能被理解、被调用、被编排、被复用”。
而 OpenClaw 的到来,让这件事第一次真正变得具体起来。
所以这场圆桌,不只是讨论一个工具,也不只是讨论几个机器人项目,而是在讨论一个更大的问题:
❝当 Agent 开始进入物理世界,我们到底该如何重新设计机器人系统?
3 月 15 日下午 2 点,欢迎一起来聊。