当你想要伸手喝水时,大脑瞬间涌现的是那个“想拿这杯水”的念头,而非一连串复杂的运动指令——抬肩15度、伸肘30度、屈腕、四指弯曲握持……
抓住这一本质,正是中科意象在脑机接口领域给出的全新解题思路。近日,中科意象联合中国科学院自动化研究所,在猕猴实验中成功实现仅需解码0.2秒即完成运动意图,并由AI自主规划机械臂与灵巧手轨迹完成抓取。这一成果验证了“意图解码+AI规划+具身执行”的新型脑机融合范式,为脑机接口打开了另一个维度的想象空间。
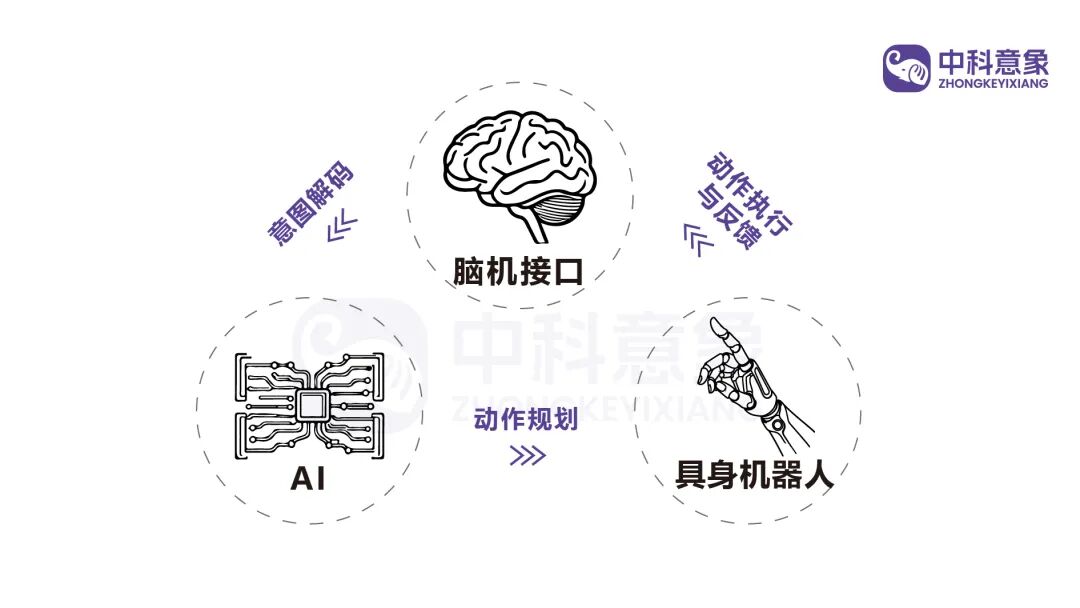
*脑机接口、AI与具身机器人的闭环协同系统示意图
传统植入式脑机接口大多聚焦于“动作解码”,即从大脑初级运动皮层(M1)神经元放电中实时解析出速度、角度等连续物理参数来操控机械。这本质上是在运动控制链路的最末端进行“窃听”——M1区神经元的放电模式跟肌肉收缩存在近似线性的对应关系,系统可以将其翻译成“收缩肱二头肌”这类底层指令。这种模式在系统两端同时发生了巨大的技术浪费。在大脑端,付出了开颅植入的高昂代价,却仍在读取最低层级的“执行参数”,完全忽视了大脑强大的认知、规划能力;而在机器人端,高度智能化的外设却像提线木偶一样,被动地、逐帧地接收遥操指令,完全无视了AI与具身智能所拥有的自主规划与操作能力。所以,这样运行的脑机系统在控制高自由度外设的时候,就像在同时扮演一个笨拙的译码器和一台迟钝的遥控器,不仅用户的认知负荷极高,控制精度、流畅度也大打折扣。
中科意象此次提出的技术主张是:不再解码动作,而是执行意图。
猕猴借助意图式脑机抓取食物
在最新披露的动物实验中,面对位置随机变动的多个托盘,猕猴只需在脑中产生想要抓取其中某个托盘的运动意图。系统在0.2秒内就能准确识别这一高层信息,随后的机械臂路径规划、避障、接近、抓握与递送,全部交由AI规划模块与具身机器人自主协作完成。
这一范式转移的核心在于:人脑回归决策与意图主导,机器接管繁琐的细节执行。这不仅大幅降低了用户的认知负担,更让操作准确性与连贯性实现了质的飞跃。
更有趣的发现来自神经科学层面。本次实验的信号记录完全来自初级运动皮层(M1)。但在持续的脑机协同训练中,团队观察到M1皮层涌现出了高层的运动意图信息,打破了认为M1主要负责执行,意图只在更高阶的脑区表征的传统观点。这预示着未来可以利用神经可塑性,从M1单一脑区提取包括意图、规划、执行等多维度信息,从而实现更加简单但是更加高效的脑机接口控制。
在脑机接口领域,埃隆·马斯克的Neuralink是绕不开的标杆,Neuralink追求数千通道的高带宽全脑读写,而中科意象通过脑科学+AI的赋能,设立了一条有望“换道超车”的差异化路径:
-
低通道,高灵活:仅需数十通道解码高层意图,再通过充分发挥AI与具身智能的能力,同样可实现灵巧手的复杂三维操控。
-
极微创,自动化:针对植入手术创伤大痛点,自主研发了激光颅骨微创与自动柔性电极植入一体化设备。通过直径仅300微米的“针灸级”颅骨微孔替代开颅,辅以机器人精准自动植入,有望极大降低植入手术的创伤与成本。
这套“极微创+自动化植入+低通道意图解码” 的全流程解决方案,将推动脑机接口走向易用、实用、好用。根据公布的规划,中科意象已完成种子轮融资,并预计于2026年下半年开展首例人体临床试验。
中科意象成立于2024年,依托中国科学院自动化研究所技术力量,秉持“脑科学+AI赋能脑机接口,脑机接口拓展人类智能边界”的理念,在意图解码、AI任务规划及具身执行领域构建了核心技术壁垒,为未来的人机智能融合时代构建关键技术基础。

来源:中科意象










