芝能智芯出品
芝能智芯出品前几天禾赛把图像的能力和激光雷达结合,现在速腾也在做。
2026年大家约好了一样,过去几年自动驾驶的核心竞争是“谁的激光雷达更远、更准”,那么今天的变化是从“点云”到开始比“像素”。
激光雷达要吞掉摄像头,从模拟时代走向数字时代,从“测距工具”变成“成像系统”。
RoboSense(速腾聚创)发布的“创世”架构以及两颗SPAD芯片,用芯片去接管原本复杂分散的光学和模拟系统,让激光雷达真正进入“图像时代”。
Part 1
理解这次“创世”架构,关键是激光雷达正在被芯片重新定义。
传统激光雷达是一个“模拟系统”:发射激光、接收反射、通过模拟电路还原距离信息。
核心变化在于SPAD(单光子雪崩二极管)+ SoC的一体化。SPAD可以把单个光子的返回信号直接转化为数字信号,再通过片上SoC完成处理,整个感知链路从一开始就是“数字的”。
一旦进入数字域,就可以沿着类似半导体的路径演进:更高集成度、更高分辨率、更低成本。
当底层变成数字化之后,直接带来的变化就是感知形态的改变。
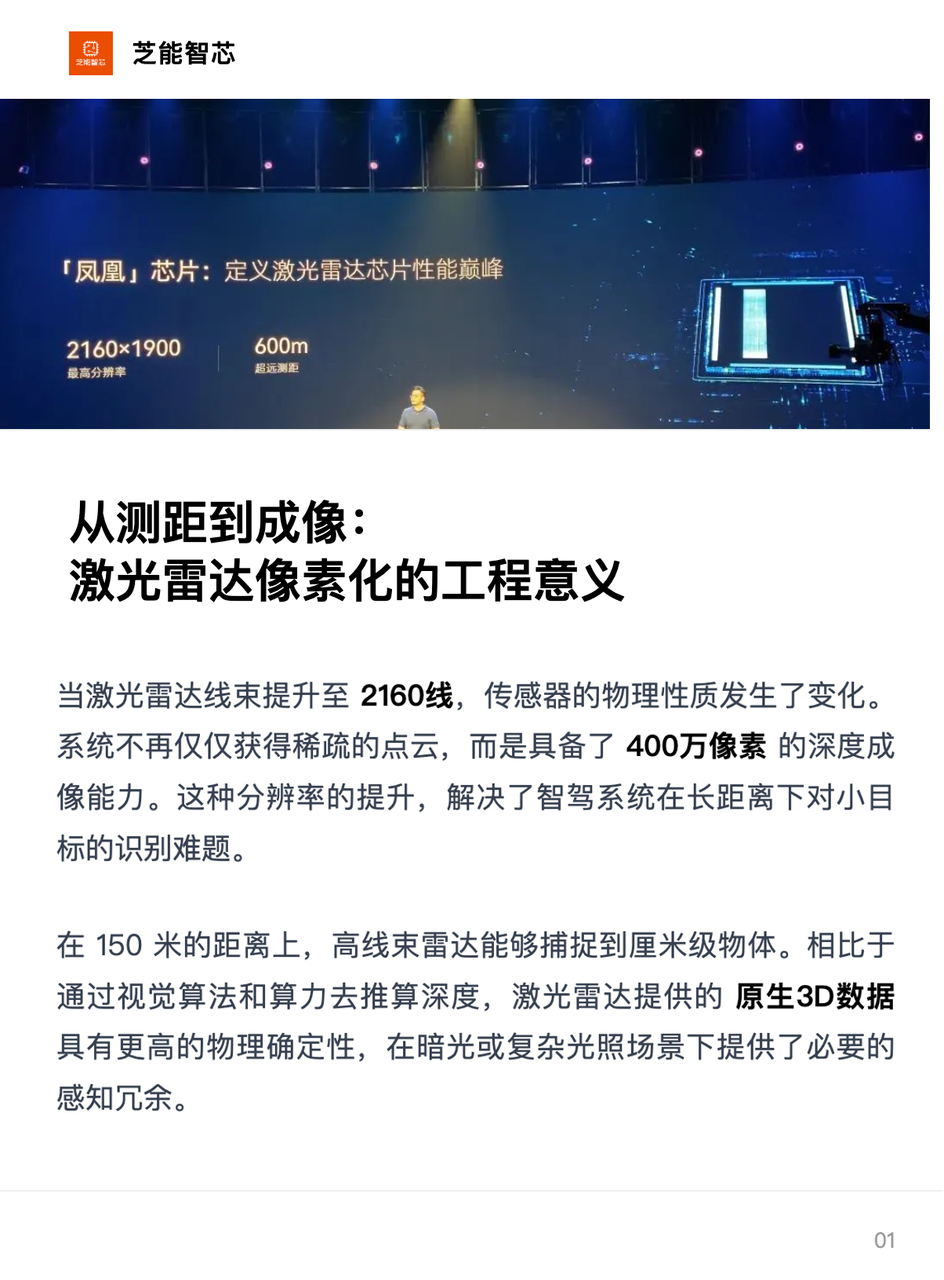
◎ 以“凤凰”芯片为例,单片集成2160线、超过400万像素、600米探测距离,激光雷达输出的不再只是稀疏点云,而是接近“深度图像”的数据形态。过去点云需要大量算法去补全、拟合,现在则更接近直接“看见”。
◎ 而“孔雀”芯片则是另一条路径:640×480的大面阵、180°×135°的超广视角,以及毫米级精度,把激光雷达从“前向主传感器”,扩展到“全域覆盖”的感知网络。尤其是在补盲、侧向、近距离场景中,这种高密度、低成本的方案更容易规模化。
激光雷达的竞争正在从“单个性能指标”,转向“系统级成本/性能曲线”。
当架构数字化之后,性能可以随着芯片迭代不断提升,而成本则有机会沿着类似摩尔定律的路径下降。这也是为什么邱纯潮会说,模拟架构的128线是终点,而数字架构的192线只是起点。
速腾还预告了RGBD传感器,把深度信息和RGB彩色信息在芯片层融合,未来不再需要在“摄像头 vs 激光雷达”之间做选择,而是直接在一个传感器里完成几何和语义的统一。
换句话说,激光雷达正在从“辅助感知”,走向“主感知形态之一”。

Part 2
如果把这个变化放到机器人领域,会更有意思。今天很多机器人,无论是配送、清扫,还是人形,在感知上其实面临一个共同问题:要么依赖摄像头,语义强但距离和精度有限;要么依赖激光雷达,几何准但信息稀疏。这种割裂,使得系统复杂度和成本都很高。
而当激光雷达进入“图像时代”之后,情况会发生变化。
◎ 感知能力的统一。高分辨率SPAD带来的“深度图像”,叠加未来RGBD能力,意味着机器人可以在一个传感器上同时获得空间结构和语义信息。这更接近人类视觉,而不是今天的“多传感器拼接”。
◎ 成本和规模化。机器人最大的瓶颈之一并不是技术,而是成本结构。
当激光雷达变成标准化芯片平台,随着出货量增加,价格下降,才有可能从“高端设备”变成“通用组件”。这一点,在低速无人车已经开始显现。
过去机器人需要围绕“如何融合不同传感器”来设计,而未来可能转向“如何利用统一感知数据”。这会直接影响算法、算力分配,甚至整机形态。
可以做一个判断:当激光雷达从“点云工具”变成“图像传感器”,机器人感知体系会经历一次类似从功能机到智能手机的跃迁。
从“创世”架构到凤凰、孔雀,再到未来的RGBD,速腾聚创从光学和结构,转向芯片和架构。性能提升不再是线性的,而是可以沿着半导体规律持续迭代;成本不再刚性,而是有机会随着规模下降。