

灵巧手不只是机器人末端硬件,而是一套能在真实世界中感知、修正并持续进化的灵巧操作系统。
作者|寇雨然
编辑|王博
「甲子光年」独家获悉,机器人灵巧手初创企业伯牙智能已完成数千万元天使轮融资。本轮融资由乾融控股领投,苏创投、熙诚致远跟投。融资资金将主要用于高自由度灵巧手产品迭代、软硬件团队扩张,以及面向真实场景的数据和解决方案建设。
伯牙智能成立于2024年8月,创始人兼CEO刘欣曾长期在阿里巴巴操作系统事业部和智能汽车相关业务中工作,曾任阿里巴巴技术总监、阿里斑马智行产品负责人,后任蔚来汽车乐道智能化产品负责人,长期负责软硬结合的复杂产品定义、研发管理和智能化产品落地。
在刘欣看来,智能汽车和机器人在底层技术栈上存在高度相似性:都需要感知、计算、控制,以及对物理空间的理解。不同的是,汽车理解空间是为了避免碰撞,而机器人理解空间,是为了和真实世界发生互动。

伯牙智能创始人兼CEO刘欣,图片来源:甲子引力
这也决定了伯牙智能的团队底色:既要懂复杂软硬件产品,也要懂机器人本体、控制和科研前沿。
CSO张斯成曾任阿里斑马智行联合创始人、阿里钉钉副总裁、明略集团首席战略官,具备智能硬件生态和商业化经验;CTO陈浩耀是哈尔滨工业大学(深圳)教授、自动化系主任、博士生导师,长期研究机器人控制;首席科学家张世武是中国科大工程科学学院副院长、中国科大人形机器人研究院副院长,长期从事机器人和精密机电系统研究。
而这个团队的核心目标是,把高自由度灵巧手从一个机械末端,做成融合硬件结构、触觉感知、力控算法和真实数据反馈的灵巧操作系统。
1.技术取舍:基于人手生理结构的混合驱动路线

过去一年,灵巧手赛道变得热闹,也变得越来越像。
20个以上自由度、五指仿生、触觉感知、混合驱动、力位混合控制、仿真生态、大小脑架构,正在成为高端灵巧手公司的共同语言。
但是,什么才是灵巧手的最优解?
「甲子光年」认为,力量和重量,速度和稳定性,触觉和成本,精密控制和柔顺性,硬件寿命和可维护性,模型泛化和真实任务成功率。这些问题都是灵巧手从实验室样机走向真实场景时绕不开的部分。
“技术路线本身不是最重要的。”刘欣告诉「甲子光年」,“真正重要的是,你想解决什么问题,然后为了这个目标做什么取舍。”
伯牙智能没有把灵巧手定义为一个孤立的机械末端。
在很多机器人系统里,机械臂负责把手送到物体附近,灵巧手负责抓取和操作。按照这种理解,灵巧手公司最容易讲的是硬件参数:自由度、重量、负载、指尖力、触觉分辨率。
但在伯牙智能看来,这种定义还不够。

伯牙灵巧手夹取螺丝,图片来源:伯牙智能
机器人真正进入真实场景之后,问题不是把手伸过去就结束了,而是碰到物体之后发生了什么。杯子有没有滑,布料是不是被拉紧,瓶身会不会被捏变形,螺丝有没有拧到位,这些都发生在接触之后。它们不是单纯的视觉问题,也不是单纯的机械结构问题,而是结构、驱动、触觉、力控、算法和数据共同作用的结果。
因此,伯牙更愿意把灵巧手看成一套“灵巧操作系统”。
在这套系统里,硬件只是第一层。自由度、力量、重量和速度,决定了一只手能不能完成基本动作;触觉和力反馈,决定了它能不能知道自己碰到了什么;控制系统决定了它能不能在接触瞬间做出调整;数据和模型,则决定了它能不能从一次次成功和失败中继续变好。
伯牙智能的首发产品高山S1灵巧手,正是在这个逻辑下被定义出来的。

高山S1灵巧手,图片来源:伯牙智能
这款产品的手部不到500克,接近人手的重量,拥有22个自由度和30N指尖力。单看参数,它当然是一只高端灵巧手。但伯牙真正想强调的,是这些指标背后的系统取舍:末端不能太重,否则会影响整机负载和动作效率;力量不能太小,否则无法完成真实抓握;自由度不能太低,否则很难覆盖复杂操作;结构又不能过度复杂,否则维护和量产都会成为问题。
这种取舍直接体现在驱动结构上。
在灵巧手行业,绳驱、直驱、连杆,常常被拿来作为不同技术路线的标签。但伯牙没有把问题简化成“选择哪一种驱动方式”。它更接近于把灵巧手重新拆开:把手掌、小臂和手腕三个看似“孤立”的部件组成一套协同系统。
刘欣告诉「甲子光年」,人的手之所以能同时做到轻末端和大力量,并不是因为所有肌肉都长在手掌里。主要力量来自小臂肌肉,再通过肌腱传递到手指;手掌内部的小肌肉,则更多负责精细调整。
伯牙智能的混合驱动路线,也是沿着这个思路展开的。
在高山S1灵巧手中,抓握力量主要由小臂端驱动提供,再通过腱绳传递到手指;手部保留用于外展、内收等精细动作的驱动单元;手腕则通过独立自由度扩大操作空间。
换句话说,伯牙不是简单选择了绳驱、直驱或连杆中的一种,而是在不同动作需求下,把小臂驱动、手部精细驱动和手腕自由度组合起来。
这套设计在高自由度、轻量化和大力量之间找到一个可以交付的平衡点。也因此,伯牙智能的高山S1灵巧手能够在不到500克的重量下,有高达22的自由度和30N的指尖力。
这里刘欣用了一个很生动的比喻:“如果有重工业的客户需要单根手指承重5kg,我们可以在不大改设计的情况下把电机加大,就像一个人去健身房撸了半年铁,手变粗了,自然力量就变大了。”
2.评价标准:从“精准重复”转向“实时修正”

在机器人行业,很多评价标准来自传统工业机器人体系。比如,重复定位精度,因为传统工业机器人面对的是高度结构化的产线任务。只要环境足够稳定,目标足够明确,机器人最重要的能力就是把同一个动作精准重复下去。
但灵巧手面对的是另一种世界。
真实物体并不总是标准件。在这种场景里,“回到同一个位置”只是问题的一部分。更重要的是碰到物体之后,系统能不能根据反馈把动作修正回来。
因此,刘欣认为,在智能机器人时代,强调重复定位精度没有意义。
“你闭着眼睛,让自己的手指重复一百次同样的角度,其实做不到。”刘欣说,“人完成精细操作,不是靠绝对重复定位,而是靠多模态反馈。”
因此,要从“精准重复”转向“实时感知与修正”,伯牙在硬件、控制和数据三个维度上,展开了系统性的工程布局。
首先在硬件底座上,降低物理延迟,为感知修正留出空间。
轻量的手部本体降低了运动惯性,确保了操作调整的‘刹车时间’;高达1000Hz的控制频率与3Hz的开合速度,让硬件能够快速响应指令;配合0.01N的指尖触觉分辨率,让灵巧手在接触的毫秒级时间窗口内,拥有了高精度的反馈与调整能力。
这一思路也让腱绳的蠕变、磨损等问题不再成为一个必须被隐藏的脆弱点。刘欣提到,他们已经通过材料、结构和保护设计将腱绳提高到了数十万次的使用寿命,在此基础上,即便有蠕变也可以通过他们的“感知-修正”系统保持控制精度。
而对于腱绳的磨损、寿命边界问题,刘欣认为,在尽可能提高其寿命的同时,让腱绳变得更易维护、更换才是关键。
他用了一个很生活化的类比:“吉他弦也会断,但没有人会因为吉他弦会断,就不买吉他。关键是弦能不能方便更换。”
其次在控制架构上,解耦复杂决策与高频执行,确保自适应调整。
真实接触发生在很短的时间窗口里。手指碰到瓶身的一瞬间,力是不是过大、物体有没有滑移、指尖姿态要不要调整,都需要系统快速响应。如果每一次接触、每一次力控修正都交给端到端大模型重新推理,延迟和算力都会成为瓶颈。
刘欣提到,近一年备受关注的VLA模型π0系列,依然没有完全解决大模型在机器人控制中的推理延时问题。其衍生版π0-FAST,本质上也是为了降低延迟、提升推理速度而做出的压缩取舍。
这正是业内转向“大小脑分层架构”的原因。大脑负责低频的复杂任务理解和规划,比如判断要拿起哪个物体、选择怎样的操作顺序、规划大致路径;小脑则负责高频的底层动作执行,比如手指以多大力闭合、什么时候减速、检测到滑移后如何调整姿态。
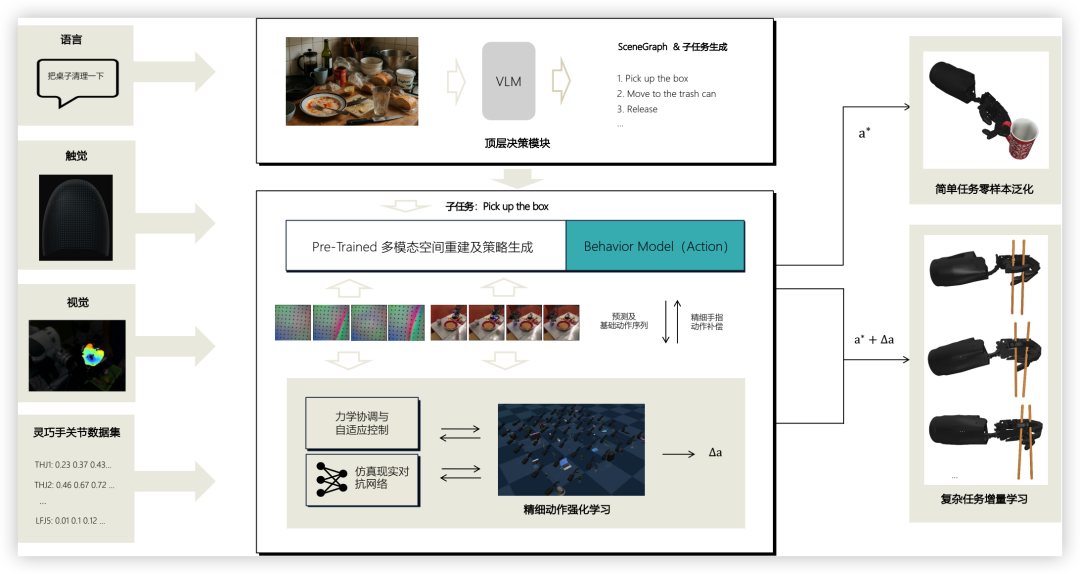
大小脑分层模型,图片来源:伯牙智能
这种分层方案的好处在于,大脑不需要占用小脑的高频控制资源,小脑也不需要每一步都等待大模型重新推理,前者解决“做什么”和“大致怎么做”,后者解决“接触之后如何稳定做成”。并且,当硬件性能出现下滑时,这种解耦的系统仍然有机会维持任务完成能力。
在真实使用中,灵巧手不可能永远处在理想状态。腱绳可能逐渐磨损,传动间隙可能发生变化,传感器信号也可能出现噪声。
刘欣认为,在大小脑分层架构下,即便小脑执行的动作变慢、抖动或出现偏差,只要上层大脑仍然能够给出任务目标和策略约束,底层控制就可以围绕反馈继续修正;而完全端到端的方案,在硬件状态变化后往往更容易出现泛化问题。
换句话说,伯牙并不是试图把所有不确定性都从硬件里消灭掉,而是希望通过感知、控制和学习,把不确定性纳入系统闭环。
最后在数据上,用“不完美的数据”让系统在真实环境中学会实时修正。
刘欣并不认为只有“成功动作”才有价值。在真实操作中,一次抓取失败、一次打滑、一次差一点成功的动作,都可能帮助模型理解任务边界。
“特别糟糕的数据当然要剔除,但次优数据有价值。”刘欣说,“它能告诉你,失败是怎么发生的。”
如果说成功数据告诉系统“应该怎么做”,那么失败数据和次优数据则告诉系统“边界在哪里”。对于灵巧操作来说,这类数据尤其重要。因为真实世界里的很多失败并不是灾难性的,而是发生在接触瞬间:力用大了、角度偏了、摩擦不够、物体开始滑移。只有记录这些过程,系统才有可能在下一次操作中提前修正。
从这个角度看,伯牙的硬件、控制和数据思路其实指向同一个目标:不是造一只在实验室里重复定位最精准的手,而是造一套能在真实世界中感知变化、处理误差、持续修正的灵巧操作系统。
3.落地路径:不急着进入家庭

在人形机器人叙事里,家庭一直是最有想象力的终局市场。一台机器人走进家庭,整理房间、端茶倒水、洗衣做饭、照顾老人和孩子,这是大众对具身智能最容易理解的图景。灵巧手作为机器人和物理世界发生交互的末端,也天然会被放进这个想象里。
但伯牙智能没有把家庭作为第一个主战场。
家庭并不是一个适合早期产品快速验证的场景,家庭里的物品种类太多,任务边界太模糊,安全要求高,用户对价格和稳定性的容忍度也低。
相比之下,科研机构和部分行业客户,更像是高自由度灵巧手的早期入口。
其中,科研客户就是伯牙智能最早面对的一批“开发者用户”。
过去,很多机器人研究集中在移动、导航、机械臂控制等方向;但当机器人开始进入真实操作任务时,末端执行器的重要性被重新放大。
对于科研机构来说,一只足够开放、可控、具备触觉和力控能力的高自由度灵巧手,本身就是开展操作学习、模仿学习、多模态感知和机器人控制研究的重要平台。
这类客户的特点是,未必马上要求完整行业解决方案,但对自由度、接口、传感器、控制能力和开发环境有较高要求。因此,科研市场不仅能带来早期收入,也能帮助伯牙智能建立开发者生态。

高山S1灵巧手执行抓取任务,图片来源:伯牙智能
除了科研市场,伯牙智能更看重的另一类早期场景,是已经具备明确人力成本、危险性或柔性操作需求的行业客户。
刘欣判断,危险环境中的远程作业,海外高人工成本地区的服务和操作任务,需要处理多品类、小批量的柔性装配,以及部分服务业场景可能会更早落地。
这些场景不一定要求机器人一开始就做到完全自主,很多时候,只要先实现远程化,就已经能够创造价值。
例如,在高危环境中,让人离开现场本身就是价值;在人工成本高的地区,一个操作员远程管理或接管多台设备,也可能产生经济性;在柔性作业中,如果机器人可以完成部分重复操作,人类只在复杂环节介入,也能提高效率。
换句话说,商业化并不只有“全自动替代人”这一条路,远程操作、半自主操作和人机协同,都可能成为灵巧手的早期落地形态。
这也解释了为什么伯牙智能不愿意只做一个零部件供应商。
对于灵巧操作来说,数据不只是训练材料,也会反过来定义产品迭代方向。哪些动作最常发生,哪些物体最难抓,哪些任务最容易失败,哪些传感器信号真正有用,哪些结构设计在真实使用中最容易磨损——这些问题很难只靠实验室假设回答,必须进入真实场景才能被发现。
如果只卖一只机械手,伯牙智能能获得的是硬件收入;但如果进入科研平台、行业客户和真实场景试点,它获得的将不只是订单,还有真实操作数据、任务反馈和工程迭代线索。硬件、控制、模型和数据之间,必须形成闭环。
刘欣认为,在高精度灵巧操作中,真机数据目前仍然非常关键。仿真当然有价值,尤其适合做算法预训练、任务验证和大规模实验,但灵巧手的接触、摩擦、形变、滑动和微小力反馈很复杂,sim2real的gap仍然存在。很多看似细微的接触差异,都会影响真实抓握和操作的稳定性。
因此,伯牙智能希望通过科研客户、行业客户和真实场景试点,逐步积累高质量操作数据。这些数据不会简单开源,但公司会提供开发环境和生态支持,包括兼容ROS、Gazebo、MuJoCo、Isaac等机器人开发生态,让更多开发者和客户能够基于伯牙的硬件和控制系统开展二次开发。
从这个角度看,伯牙智能的商业化路径与技术路线是一体的:先进入科研和行业场景,一方面可以更快形成收入,另一方面也是为了让产品在真实任务中被使用、被反馈、被修正。每一次真实抓取、每一次失败恢复、每一次远程接管,都会成为下一轮硬件设计、控制策略和模型训练的输入。
这才是伯牙智能想要滚动起来的数据飞轮:不是先闭门造出一只完美的手,再等待通用机器人时代到来;而是在真实场景中边卖、边用、边采集、边迭代,让灵巧手从一个硬件部件,逐渐变成机器人操作能力的底层入口。
(封面图来源:伯牙智能)

END.














