当“会不会写代码”不再是瓶颈,“能不能自动完成工程闭环”才真正决定一个团队的工程产能。本文将系统介绍 OpenAtom openEuler(简称"openEuler"或“开源欧拉”)Embedded 在 AI 编程时代,围绕 Agent + Skill 体系开展的研发与维护实践,覆盖 IB_Robot研发、MICA研发、ROS 软件包升级三大典型场景。
过去评价一个研发团队,可能看“代码写得好不好”;而在 AI 编程时代,代码生成本身已经不再是稀缺能力。真正稀缺的,是把“开发、构建、验证、迭代、协作、提交”这一整条工程链路自动闭环起来的能力。
openEuler Embedded 在这一点上面临的挑战尤为突出。它同时横跨 PC、开发板、云构建平台与git协作平台,本身就是一个高度复杂的工程对象:
环境复杂:一次完整的开发动作,往往要在 PC、开发板、云端构建平台、协作平台之间反复串联,人工切换路径长、出错点多。
隐性经验强:大量维护工作依赖资深工程师的个人经验,难以规模复制,也难以快速交接。
规模化困难:面对成百上千软件包的维护和升级,人力只能线性扩张,而工作量是指数级的。
在传统模式下,一个问题要走完“人工排查 → 手敲命令 → 多轮验证 → 手写描述 → 推送 PR”的完整路径;而在 Agent 模式下,这条路径需要被重塑为“问题识别 → 路由 skill → 自动执行 → 自动验证 → 人工确认关键决策 → 自动闭环 PR 推送”。
AI 时代真正有价值的,不只是生成代码,而是把使用、开发、验证、协作串成可复用的工程执行链。
在 openEuler Embedded 的日常研发与维护中,有三类问题最具代表性,也最能体现 Agent 化的必要性。
痛点一:架构演进快,人工守护成本高
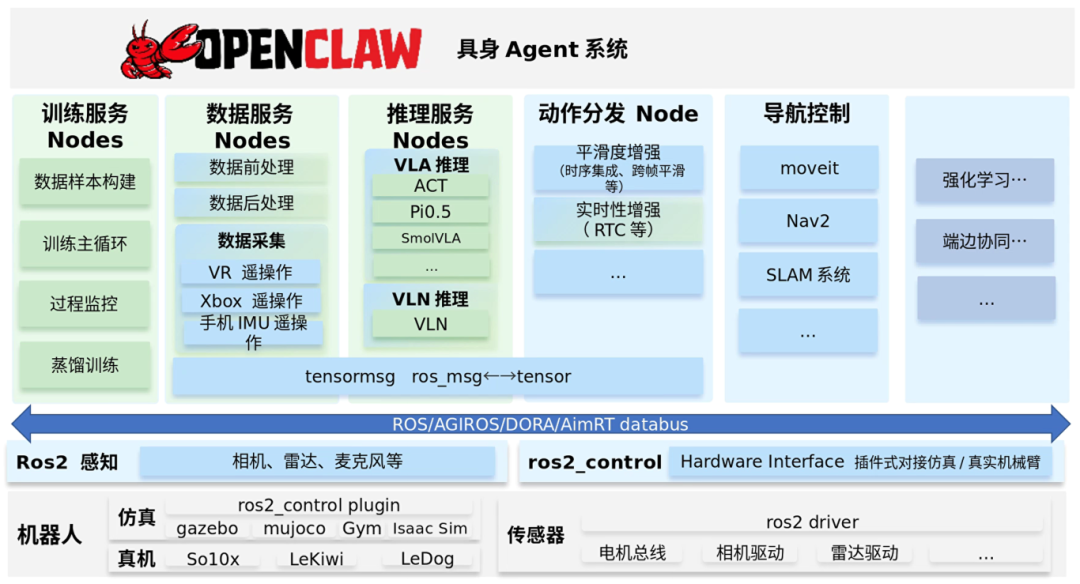
以近期快速演进的具身智能框架 IB_Robot 为例,它有严格的架构设计契约,同时其训练服务、数据服务、推理服务、动作分发、databus 等等模块正在持续演进。团队多人并行开发时,极易出现这样一种场景:
开发者快速实现完一整块新功能;但没有按照节点化、解耦化的架构设计来拆分,职责边界混乱;架构负责人在人工检视PR时才发现不符合 SSOT / 契约 / 职责边界的要求;于是几千行代码返工——重拆节点、重改接口、重补测试,成本高昂。
这里的根本矛盾是:人工检视不可扩展。架构负责人逐个检视 PR 和代码,往往已经在大块功能写完之后才发现架构性问题。IB_Robot 现阶段最需要的,不仅是能写代码的 Agent,更是能持续检查架构约束、在早期拦住错误方向、出现问题时能够自闭环的 Agent。
痛点二:特性跨仓跨领域,问题根因难判断

openEuler Embedded 的一个典型调试场景是当新南向平台/新RTOS对接进混合部署框架 MICA,开发者发现通信失败的问题。这样一个“通信失败”的黑盒现象,背后可能的根因却分布在不同领域:
是 Linux 侧共享内存配置冲突?
是 RTOS 侧 IPI 中断没配置好?
是第三方中间件的通信协议不兼容?
是 Yocto 构建的镜像少开了某个 CONFIG?
还是 ATF 的 PSCI 没把 CPU 拉起?
一个问题可能同时涉及Yocto、MICA、UniProton、kernel、厂商驱动等多个领域,人工定位极其耗时。即使有 AI 辅助,如果缺少统一的入口和问题导流,跨模块理解依然不清晰,常见问题的分析链路会很长。
痛点三:软件包数量庞大、依赖深、连锁反应强
openEuler 生态涉及海量软件包,以 ROS 包为例,逐包人工升级几乎不可持续:包数量大、依赖关系复杂、升级影响外溢(一个包的版本变更可能反向影响其他包的构建和测试稳定性),新版本还可能引入 openEuler 社区暂未提供的新软件包。
一个真实的连锁场景:

ROS 等软件包升级最大的难点,不是“传个新 tar 包再改下 spec”,而是处理海量包之间的依赖连锁、openEuler 定制化适配、跨阶段问题归因。
面对这些痛点,openEuler Embedded 的核心思路是用 Agent + Skill 体系,把零散的工程经验沉淀为“可调用、可验证、可传承”的能力模块,串起一条完整的研发维护闭环。
整体体系覆盖以下环节:

Skill 的本质,是把零散经验变成“可调用、可验证、可传承”的工程能力模块。
这条闭环的关键在于:每一个环节都不是孤立的脚本,而是可以被 Agent 按需调用、组合、并在失败时自闭环重试的能力单元。下面以三个典型实践展开。
目标:让“问一句话”就能触发正确的工程动作链
IB_Robot 的 skills 体系面向两类视角:
开发者视角:用户说“看看 issue ,Agent 自动抓取 issue 描述、查看代码上下文、修代码、跑构建、跑验证、推 PR。
维护者视角:用户说“检视下 PR ,Agent 自动抓取 diff,做代码 review 与架构 review,询问用户是否合入;若用户要求“不合入,优化提交”,Agent 回复评论;用户再说“解决下 PR 最新的评论”,Agent 抓取评论与上下文,按需闭环。
目标是让开发者只在关键分歧点做判断,其余工程动作由 Agent 串起来完成。
进展:已具备的 skills 骨架
IB_Robot 已经具备从“理解系统”到“提交协作结果”的基础骨架:
ibrobot-architecture:理解训练服务、推理服务、动作分发等架构设计,避免 Agent 无上下文地修改代码。
ibrobot-env / ibrobot-build:统一构建命令模式,避免 Agent 根据不匹配的经验自由发挥、让用户走弯路。
ibrobot-launch:标准化仿真、真机及 moveit 与推理启动方式等。
ibrobot-git-flow:自动遵循 openEuler 提交规范、DCO 与 PR 路径。
atomgit-issue:创建、读取、更新、关闭 issue,并自动抓取上下文供 Agent 分析。
atomgit-pr:创建 PR、同步标题/描述、生成结构化摘要。
atomgit-pr-review / atomgit-pr-architecture-review:同时覆盖逻辑检视与架构合规审查。
atomgit-review-resolution:拉取未解决的评论,生成修复方案并回帖闭环。
这套骨架覆盖了从架构理解、环境构建、运行验证到提交规范、issue/PR 管理、代码评审、评论闭环的全链路。它的价值不在于单点能力有多强,而在于把这些原本散落在资深工程师脑子里的经验,固化成了可被 Agent 调用、可被新人复用的标准动作。至此,开发者不再需要手工串起全部流程。
IB_Robot 开发流程介绍视频
从“任务入口”到“workflow 分流”
MICA 是 openEuler Embedded 的混合部署框架,特性天然跨 Linux、RTOS、openAMP、底座等多个领域。针对这种跨域特性,设计的核心是把“任务入口”统一化,再由 workflow 做意图分流。
MICA 的 skills 体系以一个总入口 mica-overview 起步,识别用户意图后进入对应 workflow,每个 workflow 给出可执行的步骤、命令、状态确认与失败下一跳:
开发 workflow:先定设计边界 / 模块 / 接口 / 验证路径,提交新 PR;
定位问题 workflow:拉取 issue,定位失败阶段,做日志、证据、自动化调试验证;
测试 workflow:环境准备 / smoke / 专项测试 / 失败回流,提交新 issue;
学习 workflow:建立概念模型,覆盖架构 / 生命周期 / 通信 / 底座;
检视 workflow:拉取 PR / 检视补丁,识别风险、答复 PR。
在技术领域上进一步细分:master、client、openAMP、弹性底座,以及平台协作接口。

为什么这套设计有效?
MICA 场景的难点不在某一处,而在于“问题可能出现在任何一个领域”。传统做法是工程师凭经验猜根因,逐个领域排查;而 workflow 分流的价值在于:
1.统一入口:不管问题出在 Linux 还是 RTOS,用户都从一个入口进入,由 workflow 负责导流到正确的领域分支;
2. 失败可流转:每个 workflow 都定义了“失败下一跳”,定位问题 workflow 失败可以回流到测试 workflow 重新验证,而不是停在原地等人工介入;
3. 经验可传承:生命周期、通信、pedestal 这些 MICA 特有的风险点被固化进检视规则,不再依赖个别专家的记忆。
实践案例:一次 PR 检视的完整闭环
以 MICA 仓的一次 PR 检视为例,Agent 的实际行为路径如下:
<左右滑动查看更多>
整个过程里,工程师只在一个节点上做了决策——是否合入、是否要求优化。其余的 PR 拉取、上下文组装、风险识别、评论撰写都由 Agent 完成。对于跨域特性而言,这种“统一入口 + workflow 分流 + 领域细分”的结构,把原本需要一个专家从头跟到尾的工作,拆成了可被 Agent 承接的标准流程。
把升级做成“可持续迭代的自治工程流水线”
软件包升级是 openEuler Embedded 维护工作中体量很大的一类,尤其最近的具身技术研发更依赖ROS2 humble包的升级。理想的升级流程是一句话即可触发完整的工程链:“帮我升级下 XXX ROS 包” → “没问题,提完 PR 跟你汇报”。
于是团队设计了总控 Agent openeuler-ros-upgrader 来统一管理 workspace、阶段状态、报告与失败重试路径,下挂数个 skills 串联起完整能力:
环节 1|ros-oe-upstream-init:根据 ROS 官网获取最新 ROS 包列表、仓库、分支信息,构建本地缓存池,统一拉源码、分析 package.xml、生成 spec。
环节 2|ros-oe-pkg-prep:解析递归依赖、拓扑排序,生成可供构建流程并行构建的 layers 层级顺序,确定最终需要生成的包列表。
环节 3|ros-oe-repo-fork:从包名自动映射到 src-openeuler 仓,并 fork 出个人迭代 repo。
环节 4|ros-oe-pkg-update:更新 tar 包、spec、patch,智能化分析老补丁的去留、检视 spec 修改是否合理。
环节 5|ros-oe-eur-init:把需要升级的软件包批量注册到 EUR / eulermaker 项目。
环节 6|ros-oe-eur-build:按拓扑层级触发云端构建,轮询监测构建状态,自动下载日志并智能化分析失败原因,按需修复后续跑。
环节 7|ros-oe-board-test:配置开发板环境 repo 源,重新安装新版本包,执行 ROS 冒烟测试、指定软件包功能测试,支持智能化修复迭代。
环节 8|ros-oe-pr-submit:根据前序环节的问题记录,整理 diff,自动生成详细 PR 描述,推送社区 PR。
核心原则:遇到 patch、build、test 失败,不跳过、不忽略,而是智能化调动 code agent 进行分析、修复、重试。
这条原则是整套流水线能“自治”的关键。ROS 升级里真正的难点恰恰不在常规环节,而在于那些上游变更、补丁冲突、依赖缺失等需要逐个分析的异常场景。如果还像传统脚本工程,遇到失败就跳过或留给人工,那当升级规模上升,人工兜底的瓶颈立刻会重现。我们的做法是让 Agent 在每一个失败点上都先尝试分析根因、生成修复方案、重试闭环,只有在确实需要策略决策时才上交给工程师。
ROS包升级流程介绍视频
当前进展与后续计划

当前进展(openEuler Embedded 3.30 版本):基于 openEuler 24.03 LTS (aarch64) 新增 / 升级了 139 个 ROS Humble 软件包,功能范围主要涵盖:
机器人自主导航(Navigation2 + RealSense 相机 + RTAB-Map SLAM);
通用 USB 摄像头驱动(usb_cam);
Web / WebSocket 通信桥接(rosbridge_suite);
ROS2 命令行工具(ros2cli)的旧版本缺陷修复;
……
后续计划(openEuler Embedded 未来版本):根据 ROS 社区官方软件包列表,目标覆盖全量 ROS2 humble 软件包。策略上,分析全量 ROS2 humble 包的依赖关系做拓扑分层构建,及时识别升级阻塞包、需人工介入的软件包和环节,对 Agent 升级 ROS 包的能力做全面验证,沉淀更多经验到 openeuler-ros-upgrader skills。
openEuler Embedded AI研发的演进路径和策略
仓级扩展:把架构分析、常见问题 skill 能力应用到更多仓(如Yocto),形成跨仓问题联动。
易用性:不仅服务开发者和维护者,也服务普通用户,让功能使用、排障、升级都变成易用性极高的标准化流程。
测试全覆盖:AI 自动化生成测试用例,CICD 支持自动化测试框架,保障单元测试和集成测试 100% 覆盖率。
全自动软件包升级:全自动识别 openEuler Embedded软件包升级场景和诉求,Agent 先分析并提出执行方案,人只确认关键策略,执行部分自动闭环。
设想未来一天的工作:

让人从“流程执行者”转变为“关键节点决策者”,让 Agent 成为 openEuler Embedded 的自治执行层。
从工具自动化到生态自驱建设
把这条演进路径拉到更长的尺度看,Skill 体系的价值在于把重复性协作流程沉淀为自动化能力——工具自动化 → 能力 skill 化 → 使用者可复用 → 生态自驱建设。自动化成熟后,生态参与门槛降低,维护者从包揽执行转向规则制定与质量把关,使用者也能从生态消费者变为建设者,openEuler 生态可能从“维护者主导”走向“使用者自驱建设”的新阶段。
面向 AI 编程时代,openEuler Embedded 的实践给出的不仅是“用 AI 写更多代码”,而是把研发、构建、验证、协作、提交整条工程链路沉淀成可调用、可验证、可传承的 Skill 体系。这套思路已在 IB_Robot 架构守护、MICA 跨域协作、ROS 包自动化升级三个场景落地验证。下一步,将让这套能力从单仓走向全域,从开发者工具走向面向使用者的能力载体。

开源代码仓库:
https://gitcode.com/openeuler/IB_Robot.git
文档与教程:
https://pages.openeuler.openatom.cn/embedded/docs/build/html/master/features/embodied_ai/introduction/ib-robot_overview.html

-END-
供稿 | 胡万明
编辑 | 丘云
校审 | 史海涛、郑振宇、刘彦飞
关注我们,了解更多
▼