编者按
2025世界机器人大会于8月8日开幕,开幕式上发布了《2025具身智能机器人十大发展趋势》,以下为全文。
第一,物理实践、物理模拟器与世界模型协同驱动的具身感认知。物理实践是具身智能的本质,物理模拟器可以构建高保真的训练环境,世界模型可以提供环境当中比较本质的内部特征。三者融合既可以保证丰富、有效、真实的环境,也可以用于训练具身智能机器人与环境的接触和非接触交互的感认知能力,为其决策和控制奠定基础。

第二,多层次端到端的具身决策。由多模态大模型启发的,具有数理基础的认知与规划研究,与生命科学家的成果融合,并与实时的控制模块融合,可以显著增强具身智能机器人在非结构化环境下的泛化性和实用性。

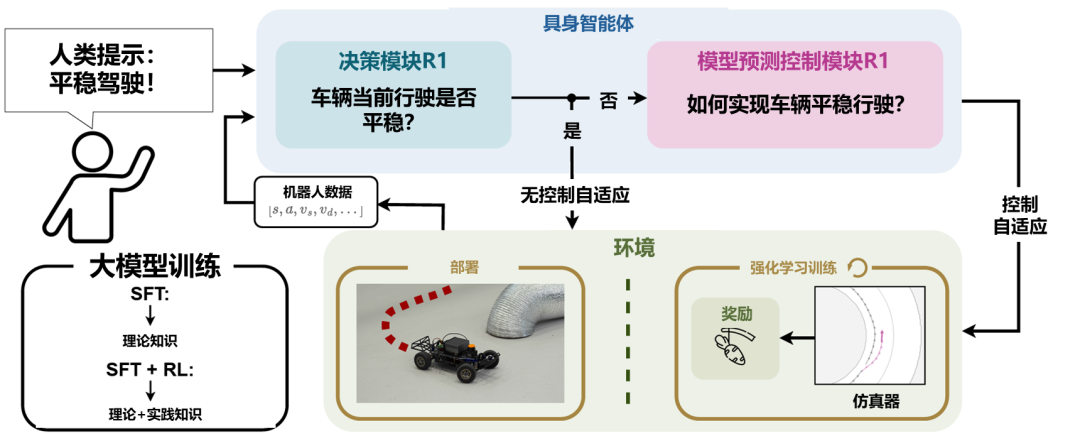
第三,从控制角度来看,可以融合模型预测、强化学习和生命科学的具身智能控制。一方面可以把模型预测控制的动态优化能力,把强化学习自适应决策融合起来,更进一步的与生命科学的冗余多环路控制机制相融合。这样的话,可以更加让具身智能机器人向人发展,实现具身智能的新控制,提升其在新环境当中的适应性和高性能。
第四,生成式人工智能驱动的具身智能机器人设计。通过对于电机、减速器、驱动器、结构、连接件和材料的统一优化,同时与工材领域的科学成果相结合,在物理模拟器当中实现硬件与控制策略的协同优化,可自动探索任务中实现最优的具身智能的机器人设计。


第五,高度协同与动态适配的具身智能软硬件一致性。具身智能机器人需要软硬件的一致性,在硬件开发的阶段需预置适配算法的接口规范,在算法的设计当中又会内嵌物理约束,就是软中有硬,硬中有软,并且通过联合仿真验证,就是有软有硬的情况下,让系统更加保持一致,让软件模块更加接近硬件,让整体系统更加符合我们的软硬件一致性的期望。

第六,具身智能机器人大工厂,在仿真环境当中实现自然语言交互、环境生成、机器人本体设计、决策-控制算法以及软硬件一致性算法等研发,让他们有机的结合在一起,并且反复进化。这样的系统可以根据性能和需求实现快速设计和实现高质量具身智能机器人系统,为社会服务。

第七,具身智能大规模高质量数据集,基于物理实体采集与仿真合成构建大规模高质量具身智能数据集。这里高质量是一个关键,关于大规模,科研的期望是让它规模要变小。同时可以显著提升具身智能机器人的本体构型优化、多模态训练效率及跨场景策略迁移能力。

第八,具身智能机器人集群及与人协同的发展,融合多智能体的协同机制,构建具身智能机器人集群。同时不断提升具身智能机器人的安全性,及其与人的共情能力,让具身智能机器人真正走向我们,真正走向人类,成为人类的朋友。

第九,跨学科的具身智能机器人开源社区。首先具身智能机器人的发展需要信息科学、工程与材料科学、数学物理科学、生命科学等多学科协作,将在全球范围内聚集各领域的顶级科学家和工程人员,促进具身智能领域的技术探讨,助力产业链的上下游深度融合和协作发展。

第十,面向具身智能机器人的安全评估与伦理建设,通过行为规范验证、决策可解释性分析,和数据安全性研究等,能够确保建立面向具身智能机器人的安全评估体系和伦理规范。确保在复杂开放环境中决策的可靠性、可解释性以及行为的安全性,这才使得具身智能机器人能够走向我们的服务行业。


10 Trends of
Embodied Intelligent Robots
TREND
Embodied Cognition Driven by the Synergy of Physical Practice, Physical Simulators, and World Models

Physical practice is the essence of embodied intelligence. Physical simulators construct high-fidelity training environments, while world models provide the internal characteristics of the environment. The integration of these three elements enables the creation of rich, effective and realistic environments for training embodied intelligent robots in perceptual and cognitive abilities regarding both contact and non-contact interactions with the environment, laying a solid foundation for decision-making and control.
TREND
Empowering Embodied Decision-Making via Multimodal Large Model

Multi-level end-to-end embodied decision-making: Inspired by multimodal large models, the research on cognition and planning with mathematical and physical foundations, integrated with life sciences and combined with real-time control modules, significantly enhances the task generalization ability of embodied intelligent robots in unstructured environments.
TREND
Embodied Intelligent Control via Integrating Model Prediction, Reinforcement Learning and Life Sciences

By integrating the dynamic optimization capabilities of model predictive control, adaptive strategies of reinforcement learning, and the redundant multi-loop control mechanisms from life sciences, an embodied intelligent robot control system is constructed to improve the generalization and adaptability of embodied intelligent robot control in dynamic environments.
TREND
Generative AI for Embodied Intelligent Robot Design

Generative AI-driven intelligent robot design realizes unified optimization of motors, reducers, drivers, structures, connectors, and materials. In combination with research and development technologies of robotic structure, it achieves co-optimization of hardware and control strategies in physical simulators, enabling automatic exploration of task-optimal embodied intelligent robot designs.
TREND
Highly Synergistic and Dynamically Adaptive Software/Hardware Consistency for Embodied Intelligence

Embodied intelligent robots require consistent software/hardware co-design. By predefining interface specifications of algorithms during hardware development and embedding physical constraints of hardware into algorithm design, system-level consistency and optimization are achieved through joint simulation and validation.
TREND
“Manufactory” of Embodied Intelligent Robots

In the simulation environment, research and development efforts such as natural language interaction, environment generation, robot body design, decision-control algorithms, and software-hardware consistency algorithms are integrated into an organic whole, enabling rapid design and manufacturing of high-quality embodied intelligent robot systems according to specific performance and requirements.
TREND
Large-Scale and High-Quality Dataset for Embodied Intelligence

The construction of large-scale and high-quality datasets for embodied intelligence through physical entity collection and simulation synthesis can enhance embodied intelligent robots’ capabilities in morphological optimization, multimodal training efficiency, and cross-scenario policy transfer.
TREND
Advances in Embodied Intelligent Robot Swarms and the Collaboration with Humans

Integrating multi-agent coordination mechanisms to construct embodied intelligent robot swarms, while continuously improving the safety of embodied intelligent agents and their ability to empathize with humans, will facilitate such robots’ entry into human society and realize their integration with humans.
TREND
Interdisciplinary Open Community for Embodied Intelligent Robots

The development of embodied intelligent robots requires collaboration across multiple disciplines, such as information sciences, engineering and materials sciences, mathematical and physical sciences, and life sciences. This initiative will bring together experts and scholars worldwide to promote technical discussions in the field of embodied intelligence, and facilitate in-depth integration and collaborative development throughout the industrial chain.
TREND
Safety Assessment and Ethical Development for Embodied Intelligent Robots


Through behavior norm verification, decision interpretability analysis, and data security research, a safety assessment framework and ethical norms for embodied intelligent robots will be established to ensure decision reliability and behavioral safety in complex and open environments.
文章来源:中国电子学会
如需咨询商务合作、宣传推广、转载开白等事宜,请联系:18355423366 (微信同号)对接。
END











