点击蓝字
关注要点纵航 Subscribe for More



背景
在航空工业发展中,飞机噪音污染已成为制约行业可持续发展的关键问题之一。尤其是依赖螺旋桨、旋翼等旋转气动执行器的飞行器,其运行过程中产生的声学噪音不仅对环境造成干扰,更会通过特定频谱特征引发人体生理与心理的负面反应,即“心理声学惩罚”。这种惩罚与噪音频谱的集中程度、音调特性密切相关,表现为噪音被感知为更刺耳、更令人烦躁,即使声压级相同,也会带来更强的不适感。
传统飞机噪音控制手段多聚焦于被动降噪(如隔音材料、气动外形优化),难以从源头解决旋转部件产生的tonal噪音(音调集中的噪音)。随着电动航空技术的兴起,通过精准控制动力系统参数实现主动降噪成为可能。本文提出的“飞机噪音缓解系统与方法”,正是基于这一背景,旨在通过创新的推进系统设计与动态控制策略,从声学源头分散能量分布,降低心理声学惩罚,为低噪音飞行器研发提供全新技术路径。

当前技术存在的问题
当前飞机噪音控制技术在应对旋转类飞行器的噪音问题时,存在多方面显著局限,难以满足日益严苛的环境与体验需求。
首先,动力系统性能限制了噪音调节的灵活性。传统飞行器多采用内燃机驱动的机械传动系统,其扭矩曲线陡峭,仅能在狭窄转速范围内保持高效输出。这导致螺旋桨转速调节受限,无法通过改变叶片通过频率(BPF)及其谐波来分散声学能量。例如,内燃机在低转速时扭矩不足,难以维持足够推力;而高转速运行时,噪音能量集中于BPF及谐波频率,形成尖锐的tonal特征,显著增加心理声学惩罚。此外,机械传动系统的非线性特性进一步降低了转速控制精度,无法实现多螺旋桨的差异化协同运行。
其次,螺旋桨结构设计缺乏声学优化考量。传统螺旋桨普遍采用对称叶片间距,这种结构导致声学能量高度集中于特定频率。以五叶螺旋桨为例,对称间距下其噪音频谱在5倍基频处形成显著峰值,这种集中的能量分布会被人类听觉系统敏感捕捉,产生强烈不适感。同时,多数飞行器仅配备少量螺旋桨(如直升机的单主旋翼),噪音源单一且集中,进一步放大了tonal特征的负面影响。
第三,缺乏动态噪音调节能力与场景适配性。现有技术多依赖静态设计(如固定叶片角度、预设转速),无法根据实时运行状态调整声学特征。在起飞、悬停、巡航等不同飞行阶段,飞行器的噪音特征存在显著差异,但传统系统难以实时适配。例如,悬停时螺旋桨需高转速产生升力,噪音峰值显著;巡航时虽转速降低,但气流扰动噪音占比上升,静态设计无法兼顾不同场景需求。此外,地面环境复杂(如居民区、机场周边),对噪音敏感度差异较大,静态策略无法动态响应环境变化。
最后,多螺旋桨协同控制机制缺失。对于多螺旋桨飞行器,传统控制策略仅关注推力分配与飞行姿态稳定,忽略了声学协同优化。当多个螺旋桨以相同或接近转速运行时,其噪音频谱会叠加形成更强峰值,反而加剧噪音问题。同时,螺旋桨间的相位关系、转速差等关键声学参数未被纳入控制体系,无法通过干涉抵消等主动策略降低特定区域噪音。

本文的解决方案
3.1
系统整体架构设计
本专利提出的飞机噪音缓解系统100通过多维度协同优化,构建了从噪音产生源头到实时控制的完整解决方案。系统核心组成包括推进组件110、控制子系统120及声学传感器122,适用于旋翼机、倾转旋翼机、固定翼螺旋桨飞机等多种飞行器900(如图1所示)。

图 1 一种用于飞机噪声缓解系统的变体
推进组件110是系统的执行核心,每个组件包含电机112与螺旋桨114。电机112优选直驱式电动机,具备宽转速范围(如100-1000RPM)和高扭矩输出特性,其平坦的扭矩曲线确保在不同转速下均能维持高效推力输出,解决了传统内燃机转速调节受限的问题。螺旋桨114采用非对称叶片间距设计,通过打破周期性结构分散声学能量,从源头降低tonal特征。
控制子系统120作为决策核心,包含机载计算机与通信模块,可实时接收各推进组件110的运行数据,并通过控制指令调节电机112的转速、相位及螺旋桨114的桨距。声学传感器122作为反馈单元,可布置于机身、地面或监测点,采集噪音频谱数据并传输至控制子系统120,形成“感知-决策-执行”的闭环控制。
系统的核心创新在于将声学优化纳入推进系统设计与控制全流程,通过结构参数(叶片间距)与运行参数(转速、相位)的协同调节,实现声学能量的主动分散,从根本上降低心理声学惩罚。
3.2
螺旋桨结构创新:
非对称叶片间距设计
螺旋桨114的非对称叶片间距设计是降低 tonal 噪音的核心突破,通过打破传统对称结构的周期性,实现声学能量在频谱上的分散分布。
3.2.1
设计原则与实现方式
非对称叶片间距的设计基于傅里叶分析原理,目标是最小化特定频率的能量集中。对于N叶螺旋桨,叶片间角度偏离360°/N的对称值,且各间距角度互不相同(或按特定规律分布)。以五叶螺旋桨为例,对称间距应为72°,而非对称设计可采用68.5°、76.3°、68.5°、73.3°、73.4°的角度组合,通过随机化偏差分散频谱峰值。
对于偶数叶螺旋桨,可采用对称配对的非对称间距。例如,四叶螺旋桨采用“锐角-钝角-锐角-钝角”的交替分布(如图2的X形排列),既保证结构平衡,又实现声学分散。六叶螺旋桨则可采用“60°-58°-62°-60°-58°-62°”的对称重复模式(如图3所示),通过分组对称降低制造复杂度,同时维持非对称的声学效果。

图 2 非对称螺旋桨叶片间距的第一个示例,
包括对称配对的非对称间距

图 3 非对称螺旋桨叶片间距的第二个示例,
包括对称配对的非对称间距
3.2.2
与对称设计的频谱对比
传统对称叶片间距的螺旋桨,其噪音频谱在BPF及谐波处形成尖锐峰值(如图4所示),这是由于叶片周期性切割空气产生的压力波叠加所致。而非对称间距设计通过打破周期性,使压力波叠加效应分散,频谱峰值显著降低且分布更均匀(如图5所示)。例如,五叶非对称螺旋桨的BPF峰值较对称设计降低约15dB,谐波能量也呈现分散特征,大幅降低了tonal感知。

图 4 一个由叶片等距分布的螺旋桨发出的声学特征的示例频谱

图 5 一个由叶片非对称分布的螺旋桨发出的声学特征的示例频谱
3.2.3
固定与可调式设计
非对称间距可采用固定或可调式设计:固定间距在制造时预设角度,适用于噪音特征稳定的场景(如特定航线巡航);可调间距通过电机112或作动器动态调整叶片角度,适用于需实时适配不同飞行阶段的场景(如悬停与巡航切换)。可调式设计可结合声学传感器122的反馈,在0.5秒内完成角度调整,响应速度满足动态降噪需求。
3.3
多推进组件协同控制策略
针对多推进组件110的协同运行,系统提出了基于转速与相位的多维度控制策略,通过参数差异化实现声学能量的进一步分散。
3.3.1
转速分散模式
(spread-RPM mode)
该模式通过控制各推进组件110以不同转速运行,避免频谱峰值叠加。控制子系统120将各电机112的转速围绕标称值(如650 RPM)按±5%范围分散设置(如图6所示),使各螺旋桨的BPF及谐波在频谱上错开,形成分散的能量分布。

图 6 一组以一定转速范围运行的螺旋桨所发出的
声学特征的示例频谱
为平衡转速变化对推力的影响,系统同步调整螺旋桨114的桨距:当转速提高5%时,桨距减小3°以维持推力不变;转速降低5%时,桨距增大3°补偿推力损失。这种“转速-桨距”联动机制确保总推力与力矩满足飞行需求,实现降噪与飞行性能的协同优化。例如,六台推进组件在该模式下运行时,其频谱峰值较同转速运行降低约20dB(如图6与图4对比)。
3.3.2
相位控制模式
(phase-controlled mode)
相位控制通过调节多螺旋桨间的相对角度位置,利用声学干涉降低特定区域噪音。对于同转速运行的螺旋桨,控制子系统120精确控制其相位差,使声波在目标区域(如机身cabin)形成相消干涉。例如,两台三叶螺旋桨设置60°相位差(如图7所示),可使两者的噪音在cabin内相互抵消,降低内部噪音约10dB。

图7 一个依据所述方法的一种实施方式,
对两个螺旋桨之间的相对位置进行控制的示例
对于同轴双螺旋桨(如图8-9所示),系统通过azimuthal phase shift(方位相移)调整上下叶片的相对位置,模拟非对称间距效果。例如,上下螺旋桨均为两叶,通过90°相位偏移形成四叶非对称分布,其频谱特征与单四叶非对称螺旋桨一致,但结构更易实现动态调整。
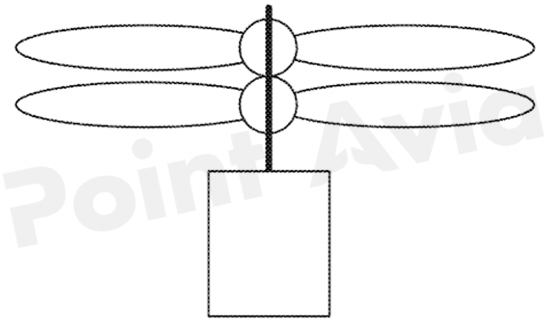
图8 一种推进组件变体的侧视图

图9 一种包含两个同轴螺旋桨(共转时存在周向相位偏移)
的推进组件的顶视图
3.3.3
动态反馈调整机制
系统结合声学传感器122的实时数据,构建闭环控制回路实现动态优化。当传感器检测到某一频率峰值超过阈值(如图10中“acoustic power pre-adjustment”曲线),控制子系统120自动增大转速分散范围(如从±5%扩展至±7%)或调整相位差,使峰值降低至阈值以下(“post-adjustment”曲线)。

图10 一个基于反馈的动态声学峰值扩散的 RPM 值示例,
该示例依据所述方法的一种实施方式
反馈信号可来自机载传感器(监测机身噪音)或地面传感器(监测环境噪音):机载传感器响应速度快(<0.1秒),适用于实时调整机舱内噪音;地面传感器覆盖范围广,可结合地理信息系统(GIS),在飞行器进入居民区上空时提前增强降噪力度。
3.4
运行模式与场景适配
系统可根据飞行器类型与运行阶段,动态切换控制模式,实现全场景降噪覆盖。
3.4.1
倾转旋翼机的模式适配
对于倾转旋翼机(如图11A-11B所示),在悬停模式(hover arrangement)下,推进组件110垂直向上,需通过多螺旋桨协同维持升力。此时启用转速分散模式(±5%范围),重点降低地面噪音影响;在巡航模式(forward arrangement)下,推进组件110水平向前,切换至相位控制模式,通过优化螺旋桨间相位减少机身噪音传入cabin。

图5A和图5B 分别展示了与倾转翼飞机结合实施的系统,
分别定义了悬停布局和前飞布局
两种模式的切换由控制子系统120根据倾转角度自动完成:当倾转角度<30°时为悬停模式,>60°时为巡航模式,中间角度范围为过渡阶段,采用混合控制策略。切换过程中,转速与相位参数平滑过渡,避免噪音突变。
3.4.2
叶片数量差异化配置
为进一步分散频谱,系统可配置不同叶片数量的螺旋桨114。例如,六台推进组件采用“2×3叶+2×4叶+2×5叶”的组合,利用不同叶片数对应的BPF差异(BPF=叶片数×转速),使频谱能量分布更均匀。控制子系统120通过预编程的“叶片数-转速-桨距”映射关系,确保不同螺旋桨协同输出目标推力。
这种配置在六台推进组件运行时,其频谱特征如图12所示,相比同叶片数配置,高频段能量分散度提高约30%,有效降低了高频tonal噪音的感知。
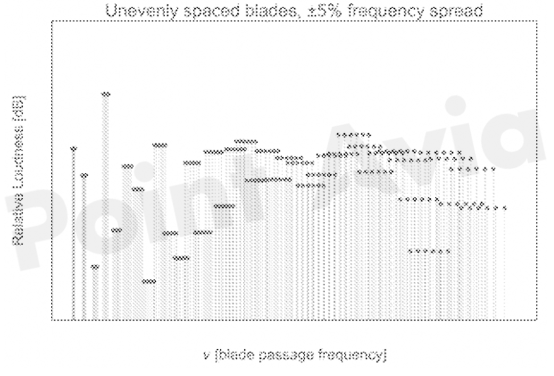
图12 一组具有非对称分布叶片、以一定转速范围运行的螺旋桨所发出的声学特征的示例频谱,该示例结合所述系统的一种实施方式
3.4.3
静态与动态策略结合
系统采用“静态基础+动态优化”的混合策略:静态策略(如固定非对称间距、预设转速范围)作为基础配置,确保常规场景下的降噪效果;动态策略(如实时相位调整、转速范围扩展)在噪音超标时介入,应对复杂环境。例如,五叶螺旋桨的固定非对称间距(RMS偏差5°)可满足巡航阶段需求,而在起飞阶段,动态增大转速分散至±7%,进一步降低地面噪音。
3.5
方法流程:
从部署到运行的全流程控制
本专利提出的方法200(如图13所示)涵盖系统部署、参数控制与反馈优化三个核心步骤,形成完整的降噪闭环。

图13 一种用于飞机噪声缓解方法的变体
3.5.1
推进组件部署(S210)
该步骤需完成推进组件110的机械安装与参数校准。对于多组件系统,需确保各螺旋桨114的初始相位差符合设计值(如六台推进组件按60°等间隔分布),电机112与螺旋桨114的同轴度误差<0.1 mm,避免机械振动引入额外噪音。非对称叶片间距的螺旋桨需通过激光测角仪校准,确保实际角度与设计值偏差<0.5°。
对于可调间距螺旋桨,需在地面测试中验证角度调节范围(通常±10°)与响应速度(<0.5秒),并记录不同角度对应的声学特征,为后续控制提供基础数据。
3.5.2
推进组件控制(S220)
该步骤是降噪核心,通过调节电机112与螺旋桨114参数实现声学优化。具体包括:
转速控制:根据飞行阶段设置转速范围(如悬停阶段600-700RPM,巡航阶段500-600RPM),控制子系统120通过脉冲宽度调制(PWM)信号调节电机112输入电流,实现转速差异化。
桨距调整:通过电机112的trim机制(微调机构)调整叶片桨距,补偿转速变化对推力的影响。例如,转速从650RPM提高至682.5RPM(+5%)时,桨距从15°减小至12°,维持推力不变。
相位调节:对于同转速螺旋桨,通过步进电机112精确控制相位差(精度±0.1°)。例如,两台四叶螺旋桨设置45°相位差,使声波在目标区域形成相消干涉。
3.5.3
声学特征确定(S225)
该步骤通过声学传感器122采集并分析噪音频谱数据,为控制策略提供反馈。传感器采样频率≥44.1 kHz,确保覆盖20-20000 Hz的人耳敏感范围。控制子系统120对数据进行傅里叶变换,提取BPF及其谐波的峰值、带宽等特征参数,并与预设阈值对比。
当某一频率峰值超过阈值(如BPF处声压级>85 dB),系统自动触发动态调整:若峰值由单一螺旋桨引起,调整其转速或相位;若由多螺旋桨叠加引起,增大转速分散范围。调整后的数据再次通过传感器验证,直至满足降噪要求。
3.6
技术优势与效果验证
1. 频谱分散效果显著
通过非对称叶片间距与多参数控制的结合,系统显著降低了噪音的tonal特征。如图4(对称间距)与图5(非对称间距)对比所示,非对称设计使五叶螺旋桨的BPF峰值降低约15dB;图12显示,六台非对称螺旋桨配合±5%转速分散后,频谱峰值进一步降低20dB,能量分布更平缓,心理声学惩罚显著减少。
2. 宽场景适配性强
系统适用于电动、混合动力等多种动力形式,尤其在电动飞行器中表现突出。直驱电机112的快速响应能力(如步进电机的角度控制精度达0.1°)确保了相位与转速的精准调节,而电池供电特性使宽转速运行无需担心内燃机的效率损失。针对倾转旋翼机、固定翼飞机等不同机型,通过模式切换可实现全飞行阶段的降噪覆盖。
3. 动态响应速度快
声学传感器122与控制子系统120的闭环联动,使系统可在0.5秒内完成参数调整,应对突发噪音变化。例如,当飞行器遭遇侧风导致螺旋桨负载不均时,系统能快速调整转速与相位,维持降噪效果的同时保证飞行稳定。
4. 结构可行性高
非对称叶片间距的设计通过有限元分析验证了结构可靠性,其最大应力增幅控制在5%以内,满足航空安全标准。直驱电机112的紧凑设计避免了对飞行器气动布局的干扰,确保飞行性能不受影响。
如需本专利原文
请联系要点纵航工作人员领取!

要点纵航工作人员微信
来源:公开信息,要点纵航整理
提示:原创文章未经允许,请勿转载
免责申明:本文中所含内容乃一般性信息,包含的价格及观点仅供贵方参考,要点纵航不对任何方因使用本文内容而导致的任何损失承担责任。


要点纵航专注于低空经济和eVTOL技术的发展,识别并研究行业的关键障碍及相关需求。我们通过提供数据、分析和见解,与行业参与者共同致力于实现安全、可持续、低成本且可及的变革性城市空中出行方式。一公里的地面交通只能带您走一公里,而一公里的空中飞行可以带您到任何地方!
如您想获取更多关于eVTOL技术的最新消息,请添加相关人员或通过电子邮件,把您的要求发送给我们。

18958230600

alfred.shen@cycolpower.com

你们点点“分享”,给我充点儿电吧~