
在生物系统中,肌腱—肌肉复合体(muscle–tendon complex, MTC)通过收缩致动与本体感觉的整合,实现了传入与传出信号的双向耦合,从而在低层级完成高效的闭环控制。这种结构既能感知长度与张力,又能输出驱动力,是生物体在复杂环境中实现自适应交互的关键。随着人机物理交互研究的发展,要在软体机器人中实现类似功能,人工肌肉不仅需要具备驱动能力,还应具备实时感知自身力学状态的能力,以克服材料的滞后性和时变特征,提高可控性和交互安全性。
液晶弹性体(liquid crystal elastomer, LCE)因其独特的介晶相变特性,能够在热或光刺激下发生大幅度可逆形变,被认为是极具潜力的人工肌肉材料。其电驱动通常依赖嵌入式加热单元,如金属蛇形电极、柔性电热膜或液态金属(liquid metal, LM)通道,其中LM兼具高导电性和高顺应性,能够在实现焦耳加热的同时提供变形感知,从而赋予LCE复合材料更高的集成度和功能性。
首尔大学Yong-Lae Park研究团队究受到生物MTC的启发,提出了一种“肌—腱功能分区”的LCE人工肌肉:在同一单体内,将各司其职的各向同性LCE(iso‑LCE)与向列相LCE(nem‑LCE)串联连接,前者类比“腱”,具更接近橡胶的即时弹性、热响应极弱,适合承担张力与长度的测量;后者类比“肌”,在焦耳热驱动下发生向列—各向同性相变并产生收缩,适合输出驱动力。两段材料通过化学交联一体成型,各自内部再嵌入独立的LM蛇形微通道:nem‑LCE中的LM承担加热与本体形变测量,iso‑LCE中的LM承担张力与伸长测量。由此,单个紧凑的软体构件同时具备“传出驱动—传入感知”的物理智能(embedded physical intelligence)。进一步地,作者将两根此类LCE肌肉以“拮抗对”形式布置,仿照生理上的屈肌/伸肌,以改善冷却回弹阶段的可控性与速度,并在手指与夹爪的原型系统上展示了闭环角度/力的控制与物体属性(刚度、尺寸)识别能力 。相关研究以“Bio-Inspired Artificial Muscle-Tendon Complex of Liquid Crystal Elastomer for Bidirectional Afferent-Efferent Signaling”发表在期刊《Advanced Materials》上。

图1 生物MTC与LCE人工MTC的结构对比。生物肌肉由肌梭和腱器官实现长度与张力感知,人工系统则通过iso-LCE和nem-LCE的分工配合以及LM通道完成驱动与传感一体化。
在材料设计与性能表征方面,作者采用巯基-丙烯酸迈克尔加成与光固化的两步法合成主链型向列相LCE,并通过拉伸取向与二次交联获得单畴nem-LCE,从而实现较大的功率密度与可逆收缩性能。同时,通过调整单体比例使另一部分保持稳定的各向同性相,获得橡胶样快速回弹与低应力松弛特性。动力学力学分析和差示扫描量热测试显示,iso-LCE在广温区维持稳定储能模量并无明显相变,而nem-LCE在相变点附近表现出典型的软弹性与强烈热响应,这种差异性正是实现“肌段致动—腱段感知”的基础。

图2 LCE的合成与表征。包括单体化学结构、光学性能、DMA与DSC分析以及蠕变与应力松弛测试,揭示iso-LCE与nem-LCE在热响应与力学特性上的差异。
在致动与传感耦合实验中,研究者模拟了三类典型收缩模式:等长、等张和辅张。在等长收缩中,iso-LCE嵌入的LM信号与张力高度一致,并可用改进的neo-Hookean模型准确回归;在等张收缩中,通过iso-LCE与nem-LCE信号的加权线性组合,可以重构整体伸长量;在辅张收缩中,则需引入校正项以补偿局部热传导与LM覆盖率不足带来的误差。最终,三类工况下的力与长度估计误差均维持在较低水平,验证了该结构在复杂加载条件下的稳定传感性能。
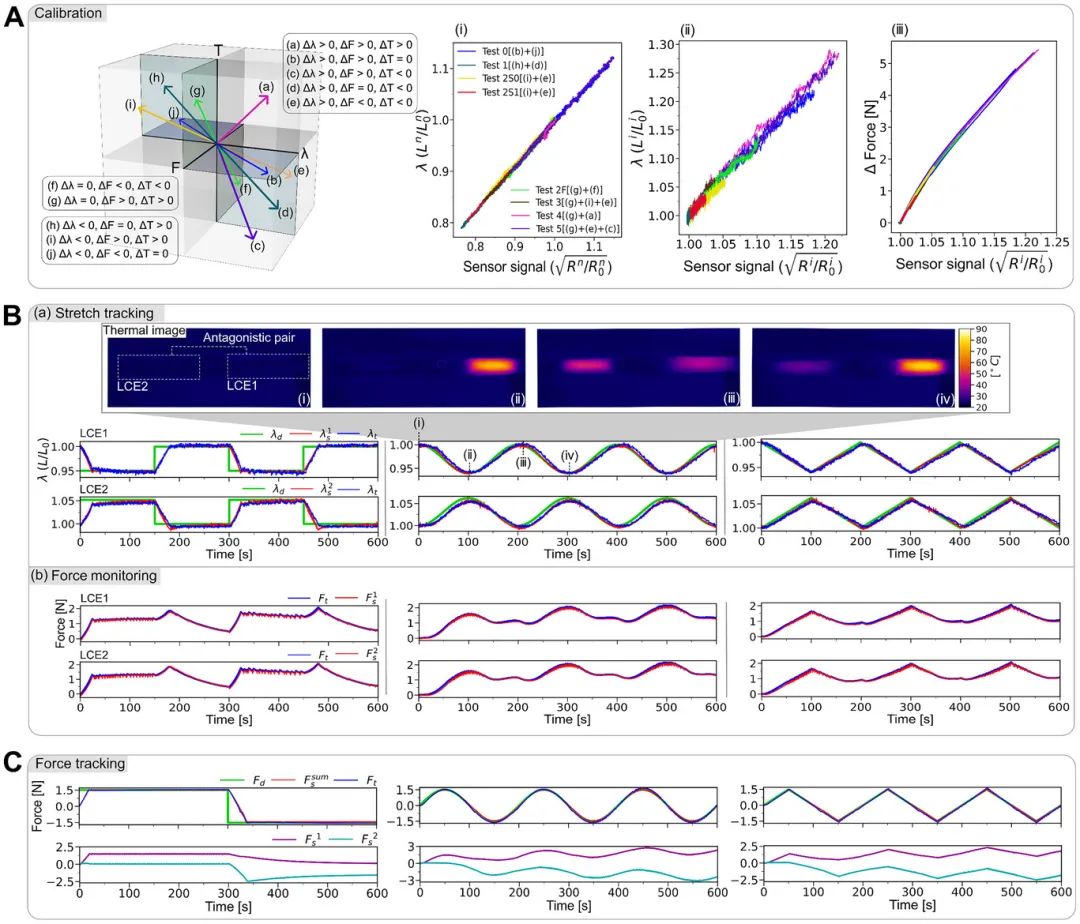
图3 三类收缩模式下的性能。等长收缩中,iso-LCE信号与张力吻合;等张收缩中,通过两段LM信号叠加可准确估计整体伸长;辅张收缩中,引入修正模型以补偿热场不均带来的偏差。

图4 校准与闭环控制。通过在三维力—长—温度空间的多工况标定,实现了拮抗人工肌肉的伸长与力控制,并在多种轨迹下表现出稳定的反馈性能。
为进一步提升动态响应,作者将两根人工肌肉组装为拮抗对,并引入闭环控制,实现了方波、正弦与斜坡等目标轨迹的跟踪。在机器人手指与柔性夹爪的演示中,系统不仅能够稳定控制角度与接触力,还能在无额外传感器的条件下识别外部物体的刚度与尺寸,完成抓取与分类等任务。这表明该人工MTC结构能够有效实现自适应的人机交互。

图5 机器人手指演示。拮抗人工肌肉实现关节角度与接触力的闭环调控,并能识别不同硬度硅胶块的刚度。
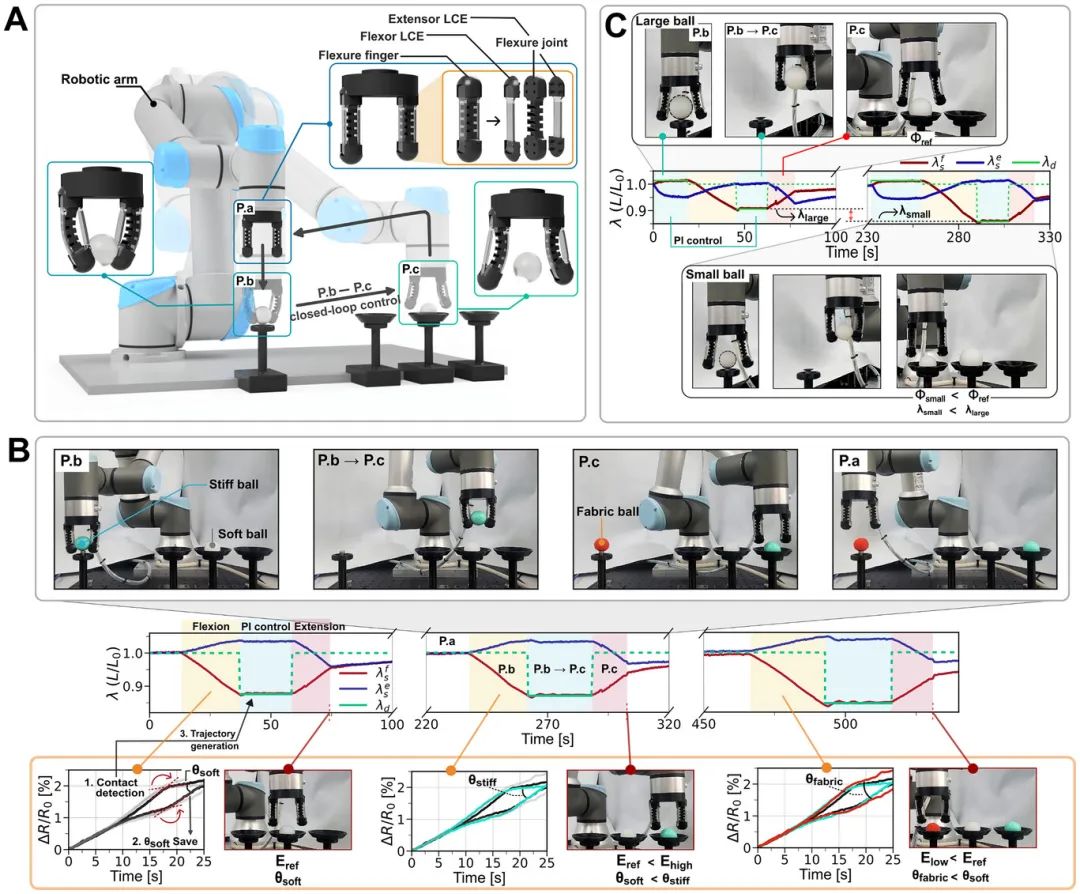
图6 柔性夹爪演示。系统通过内嵌LM信号识别球体的硬度与尺寸,完成物体的分拣与搬运任务。
论文信息:J. Cho, M. Lee, T. Park, et al. “ Bio-Inspired Artificial Muscle-Tendon Complex of Liquid Crystal Elastomer for Bidirectional Afferent-Efferent Signaling.” Adv. Mater. (2025): e03094.
https://doi.org/10.1002/adma.202503094.
来源:CAAI认知系统与信息处理专委会
仅用于学术分享,若侵权请留言,即时删侵!
欢迎加入脑机接口AI星球
获取更多脑机接口+AI等领域的知识和资源。

加群交流、商业合作请添加微信:RoseBCI【备注:姓名+行业/专业】。
欢迎来稿
1.欢迎来稿。投稿咨询,请联系微信:RoseBCI
点击投稿:脑机接口社区学术新闻投稿指南
2.加入社区成为兼职创作者,请联系微信:RoseBCI


一键三连「分享」、「点赞」和「在看」
不错过每一条脑机前沿进展