有人问:卡尔曼滤波现在已经很成熟了,研究生做这个还有希望毕业吗?问自然是有的。还记得23年活跃的因子图优化、不变卡尔曼滤波、最优输运的粒子滤波这三个发展分支吗?在2025年依旧有热度,出成果不是问题。
不过现在更多的还是卡尔曼滤波和深度学习的结合,比如主流的LSTM+卡尔曼滤波混合架构,其他热门技术诸如YOLO、Transformer、SAM等也颇受青睐。除此之外,同属新兴技术融合的强化学习+卡尔曼滤波也相当受欢迎。
可以看出,对于这种延展性强,应用场景多的方向来说,研究热度从来不缺,大家可以放心研究写论文。我这回整理了49篇卡尔曼滤波前沿论文,都是新兴类,大家可以用作参考,快速掌握技术进度,站在前人肩膀上搞定成果。
扫码添加小享,回复“KF创新”
免费获取全部论文+开源代码

深度学习+卡尔曼滤波
+LSTM
A Recurrent Neural Network Enhanced Unscented Kalman Filter for Human Motion Prediction
方法:论文提出了一种用LSTM和卡尔曼滤波结合的方法预测人手臂运动,该方法通过LSTM预测运动和肌肉力量,再用卡尔曼滤波整合并调整误差,在复杂运动场景中表现优异,提高了预测的准确性和鲁棒性。
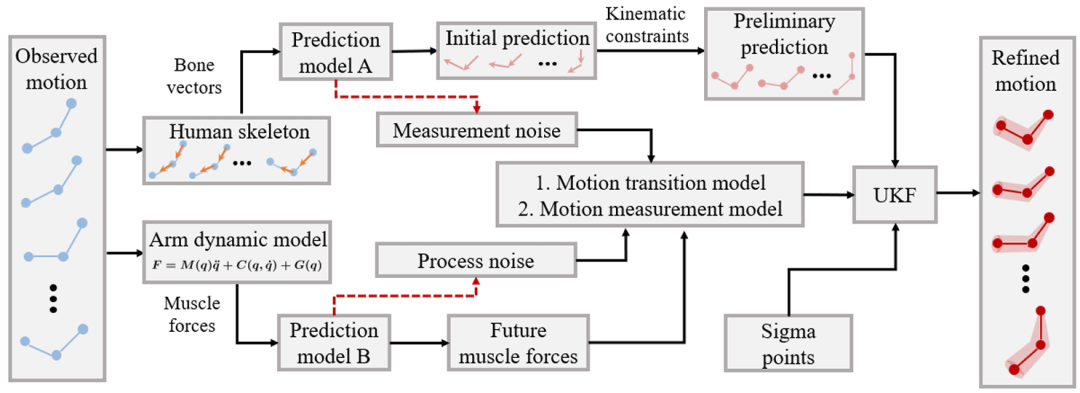
创新点:
结合LSTM与UKF:LSTM捕捉运动数据时序特征,UKF动态调整优化。 用蒙特卡洛丢弃采样量化LSTM不确定性,转化为UKF噪声协方差以自适应调整。 引入拉格朗日力学的人类手臂动态模型,结合肌肉力量与运动预测,提升准确性和物理合理性。

+Transformer
OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering
方法:论文提出了一种基于Transformer和卡尔曼滤波的四足机器人状态估计方法。通过卡尔曼滤波结合关节编码器和IMU数据,利用Transformer处理深度图像提供环境信息,再用GRU对卡尔曼滤波结果进行优化,从而提高状态估计的精度和鲁棒性。

创新点:
使用Transformer处理深度图像,提取环境语义信息和机器人高度的潜在空间表示。 结合卡尔曼滤波和GRU,利用卡尔曼滤波的输出和Transformer的潜在空间表示作为输入,优化状态估计。 在多种复杂地形上验证了该方法,相比传统VIO SLAM方法,显著降低了均方根误差,提升了65%的性能。

扫码添加小享,回复“KF创新”
免费获取全部论文+开源代码

强化学习+卡尔曼滤波
KalMamba: Towards Efficient Probabilistic State Space Models for RL under Uncertainty
方法:论文提出了一种结合强化学习和卡尔曼滤波的高效方法KalMamba。它通过卡尔曼滤波和卡尔曼平滑在潜在空间中进行推理,利用Mamba架构学习动态参数,从而高效处理长序列数据,显著提升训练效率和性能。

创新点:
提出KalMamba,结合概率状态空间模型和确定性模型的优势,通过卡尔曼滤波和卡尔曼平滑进行高效推理。 利用Mamba架构在潜在空间中学习动态参数,支持并行计算,显著提升长序列处理效率。 实验证明KalMamba在训练效率和性能上优于现有方法,尤其在长序列交互中表现优异。

KARNet: Kalman Filter Augmented Recurrent Neural Network for Learning World Models in Autonomous Driving Tasks
方法:论文提出了一种名为KARNet的模型,用于自动驾驶任务中的世界模型学习。KARNet结合了卡尔曼滤波和循环神经网络(RNN),通过融合交通流的图像数据和车辆状态信息,预测未来的交通场景。

创新点:
提出KARNet架构,结合卡尔曼滤波和循环神经网络,用于自动驾驶任务中的世界模型学习。 通过融合交通流的图像数据和车辆状态信息,显著提升对未来交通场景的预测性能。 在强化学习和模仿学习中验证,证明了结合模型驱动和数据驱动方法的有效性。

扫码添加小享,回复“KF创新”
免费获取全部论文+开源代码
