本文由“机器人ROBOT”公众号原创,欢迎转载,请务必完整转载全文并在文章初始位置插入本公众号名片和链接。
欢迎引用:
孙荣川, 高水镕, 张鑫, 郁树梅, 孙立宁. 面向复杂光照场景的异质SLAM融合方法[J]. 机器人, 2025, 47(4): 508-516.
近日,苏州大学孙立宁教授、孙荣川副教授团队在《机器人》上发表了题为“面向复杂光照场景的异质 SLAM 融合方法”的论文。针对低光照、弱纹理等复杂光照环境中SLAM方法面临的闭环检测失败和机器人轨迹精度低的问题,将传统视觉 SLAM 方法的高精度地图构建和精确定位能力与仿生 SLAM 方法在复杂光照环境下的强场景识别能力相结合,提出了一种基于模糊神经网络的异质 SLAM 融合方法,包括用于提升复杂光照场景下闭环检测成功率的基于标准型模糊神经网络的闭环决策方法,以及用于提升机器人轨迹估计精准性的基于T-S(Takagi-Sugeno)模糊神经网络的轨迹优化方法,最终实现在复杂光照环境中更准确的定位和更可靠的环境建模。实验结果表明,相较于 ORB-SLAM2 和 RatSLAM 方法,提出的异质 SLAM 融合方法获得更高的闭环检测召回率和更低的绝对轨迹误差,在复杂场景下展现出较强的鲁棒性,对提升复杂光照场景下机器人自主作业的精准性及稳定导航定位能力具有积极意义。
异质 SLAM 融 合 方法 通过将 ORB-SLAM2 与 RatSLAM闭环检测的结果和轨迹优化的结果分别进行融合,构建了如图 1 所示的并行处理架构。系统采用双通道设计:上层为仿生 SLAM 线程,由位姿细胞网络、局部场景识别和经验地图组成;下层为基于特征点法的 ORB-SLAM2 线程,包含视觉里程计、闭环检测和轨迹优化 3 个核心模块。两线程通过时间同步模块实现关键帧对齐,确保数据处理的时序一致性。特别地,创新性地引入模糊神经网络来融合异质数据,其中标准型模糊神经网络负责闭环决策,T-S 模糊神经网络负责机器人的轨迹优化,这种设计有效解决了因为数据异构而无法采用经典数据融合措施的局限性。

ORB-SLAM2 与 RatSLAM 方法的闭环检测机理存在差异,在不同环境中各具优势,结合这 2 种方法建立场景识别模块有助于提高异质 SLAM 系统在各类环境中闭环检测的准确率。针对ORB-SLAM2 与RatSLAM 的闭环检测结果不一致的问题,提出如图2所示的多属性决策(MADM)框架。首先判断 2 个 SLAM 的闭环检测结果是否一致,若都检测出闭环或都未检测出闭环,那么基于当前闭环检测结果继续建图。如果闭环结果不一致,继续输入视觉信息直至与闭环关键帧的共视地图点的数量不足为止。将与闭环关键帧满足共视关系的相邻关键帧作为闭环帧集合,同样建立闭环匹配帧集合。然后,从表征环境结构的点云模型、环境中的色彩信息以及环境几何信息3个方面构建评价指标作为决策依据。

ORB-SLAM2 与 RatSLAM 成功闭环后,需要依据闭环约束进行全局优化,从而减小机器人轨迹的累积误差。该文依据异质 SLAM 场景识别的结果,在单一SLAM方法后端中添加闭环约束,进行全局优化。针对 2 个 SLAM 位姿求解方式不同导致优化轨迹不一致的问题,提出基于 T-S FNN的异质 SLAM 轨迹融合方法。在轨迹优化阶段,模糊规则用于评估 2 种SLAM 方法的位姿估计的可靠性,并自适应地融合2种 SLAM 方法的位姿估计结果,从而获得更优的机器人轨迹。T-S FNN 由输入层、模糊化层、模糊规则前件、归一化层以及模糊规则后件组成。其中,T-S FNN 的模糊后件为网络输入的函数形式,由 3 层网络组成,其拓扑结构如图3所示。

为了验证所提方法在复杂光照场景中的机器人定位与建模结果的精确性,使用 4 组数据集对所提的异质 SLAM 融合方法进行验证,前 3 组实验在灯光可控的室内环境中开展,如图4所示,第 4 组实验使用DRE-SLAM 公开数据集,覆盖了低光照、弱纹理等复杂光照场景。实验 1 的轨迹简单、闭环数量少,用于场景识别和基于 T-S FNN 的轨迹优化方法的独立验证。实验 2、3、4 中机器人的轨迹复杂,存在多个闭环,用于验证整个异质 SLAM 融合方法的性能。

表1~4显示了实验中的闭环决策对比结果,验证了所提出的异质 SLAM融合方法能在低光照、弱纹理的复杂场景中建出更准确的环境模型。相较于 RatSLAM 和 ORB-SLAM2 方法的场景识别结果,基于模糊推理网络的场景识别方法在复杂的环境中更具优势,适应性更强,其闭环准确与召回率有明显提升。

选取环境中具有辨识性的位置点作为距离评估锚点,表5~7显示了实验1~3中的环境结构误差对比,图5显示了实验4中的误差对比。所提方法获得的轨迹地图中两点距离的整体平均误差相比单一SLAM方法小很多,轨迹地图更加精确,因此实验验证了所提的轨迹融合方法相较于另外2种 SLAM方法更优。
表5 实验1中轨迹融合误差分析

表6 实验2中轨迹融合误差分析
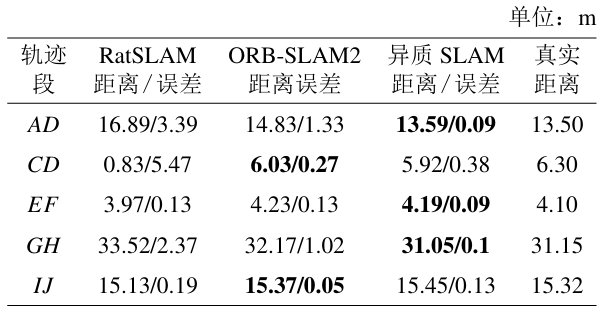
表7 实验3中轨迹融合误差分析
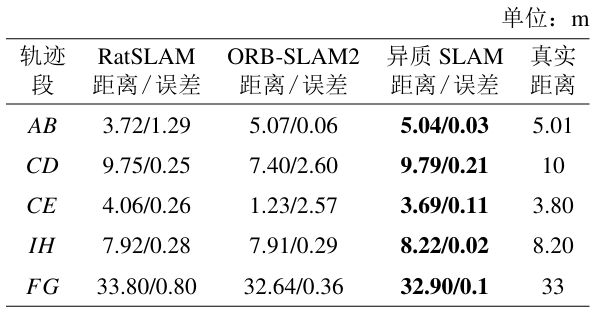

图5 实验4(DRE数据集)的误差分析
该文提出了一种基于模糊神经网络的异质 SLAM融合方法,通过将传统视觉 SLAM(ORB-SLAM2)与仿生 SLAM(RatSLAM)方法的优势相结合,显著提升了系统在复杂光照环境下的性能,研究成果为机器人导航在复杂场景下的实际应用提供了新的可行技术方案。未来将重点突破更多模态SLAM方法的融合,进一步拓展机器人导航系统在工业巡检、无人驾驶等领域的应用潜力。
苏州大学机电工程学院孙荣川副教授为论文第一作者,郁树梅教授为论文通信作者,该文获得了机器人学国家重点实验室开放课题(2024-O27)的支持。


识别二维码,访问全文PDF
联系我们 :

电话:024-23970050

E-mail:jqr@sia.cn

网址:https://robot.sia.cn