打造一个有温度、有趣味、专业的全栈式AI&AIGC交流社区,
用心写好每一篇文章!
代码链接-近期开源
论文链接-https://arxiv.org/pdf/2509.06784

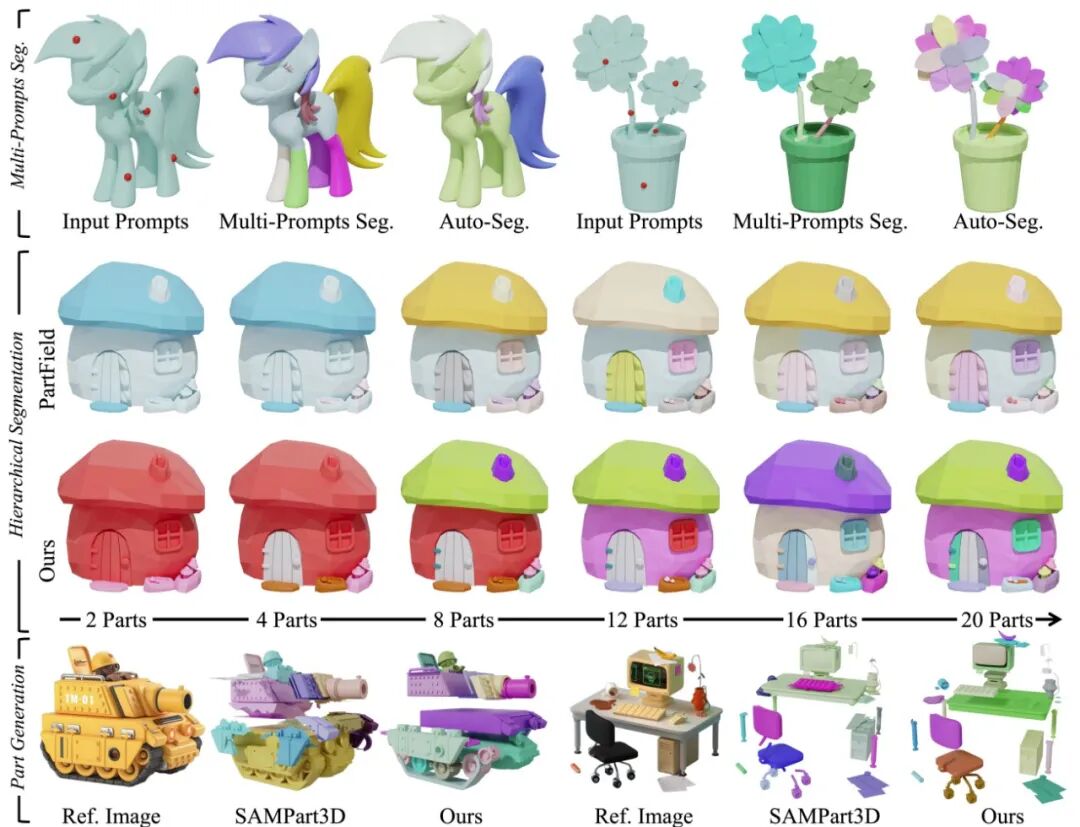
01-P³-SAM核心优势

本文提出了一种原生3D点提示零件分割模型P³-SAM,它旨在将任何3D对象自动分割成完成的3D组件。受到SAM的启发,P³-SAM由一个特征提取器、多个分割头和一个IoU预测器组成,为用户提供交互式分割。
除此之外,作者提出了一种用于自动选择和合并由模型预测的掩模方法,用来完成零件实例分割。
该模型是在一个新构建的数据集上训练的,该数据集包含近370万个具有合理分割标签的模型。
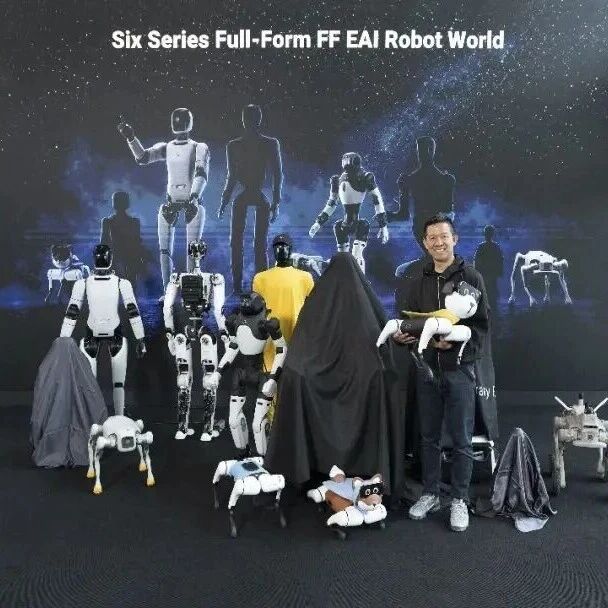
02-P³-SAM变现场景
03-P³-SAM整体流程
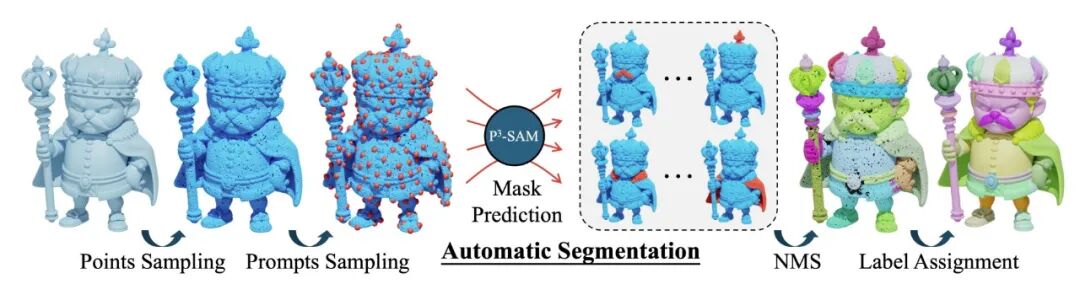
上图展示了全自动分割的整体流程。详细的步骤如下所述:
首先,对输入的3D点云执行“点采样”操作;
然后,将点采样结果转换为类似SAM的“点提示采样”;
接着,利用P3-SAM获得多个掩码结果;
接着,采用NMS合并来剔除冗余掩码;
最后,将点级掩模投影到网格面上,从而获得零部件分割结果。
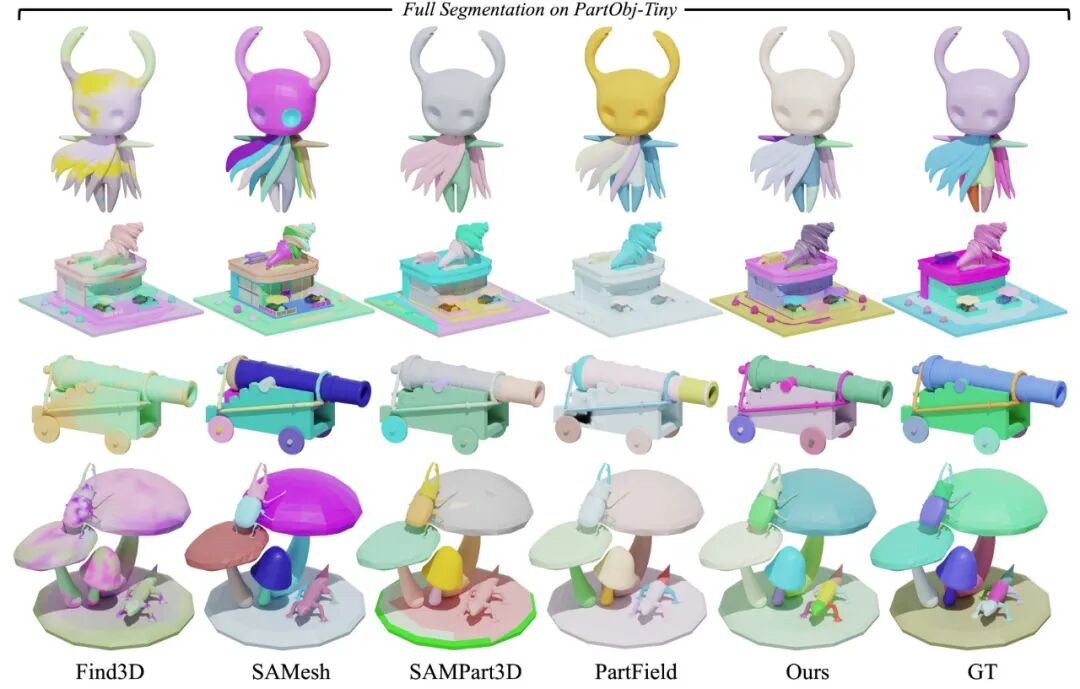
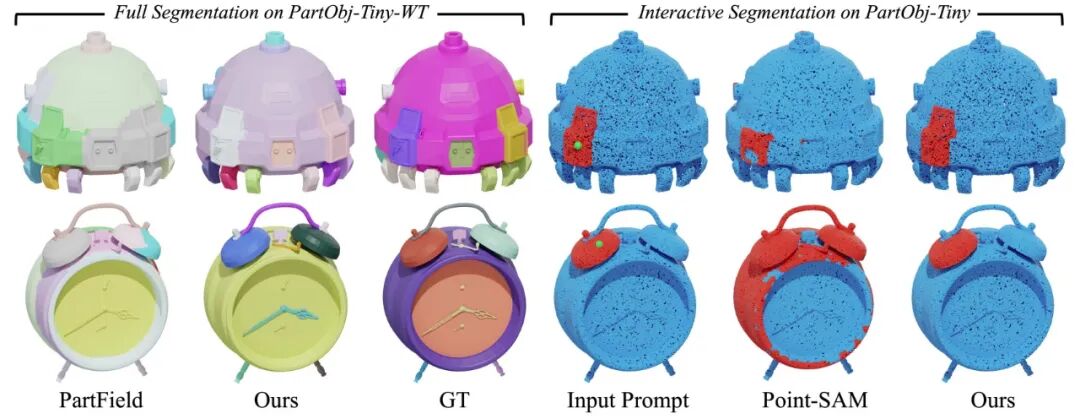
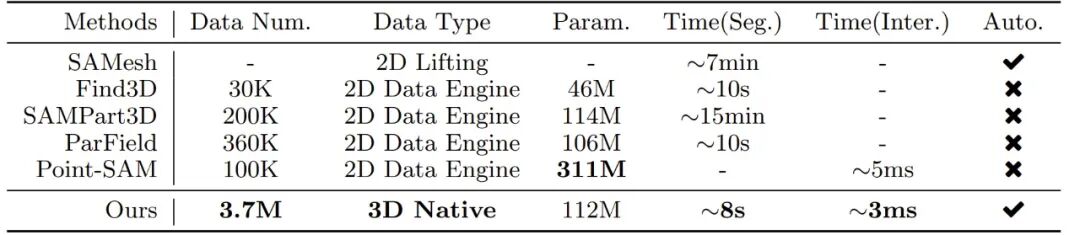
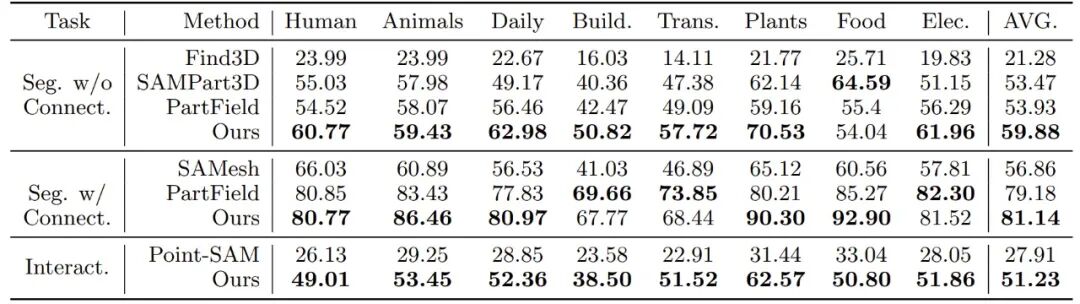
04-P³-SAM性能评估
关注我,AI热点早知道,AI算法早精通,AI产品早上线!

禁止私自转载,需要转载请先征求我的同意!
欢迎你的加入,让我们一起交流、讨论与成长!