
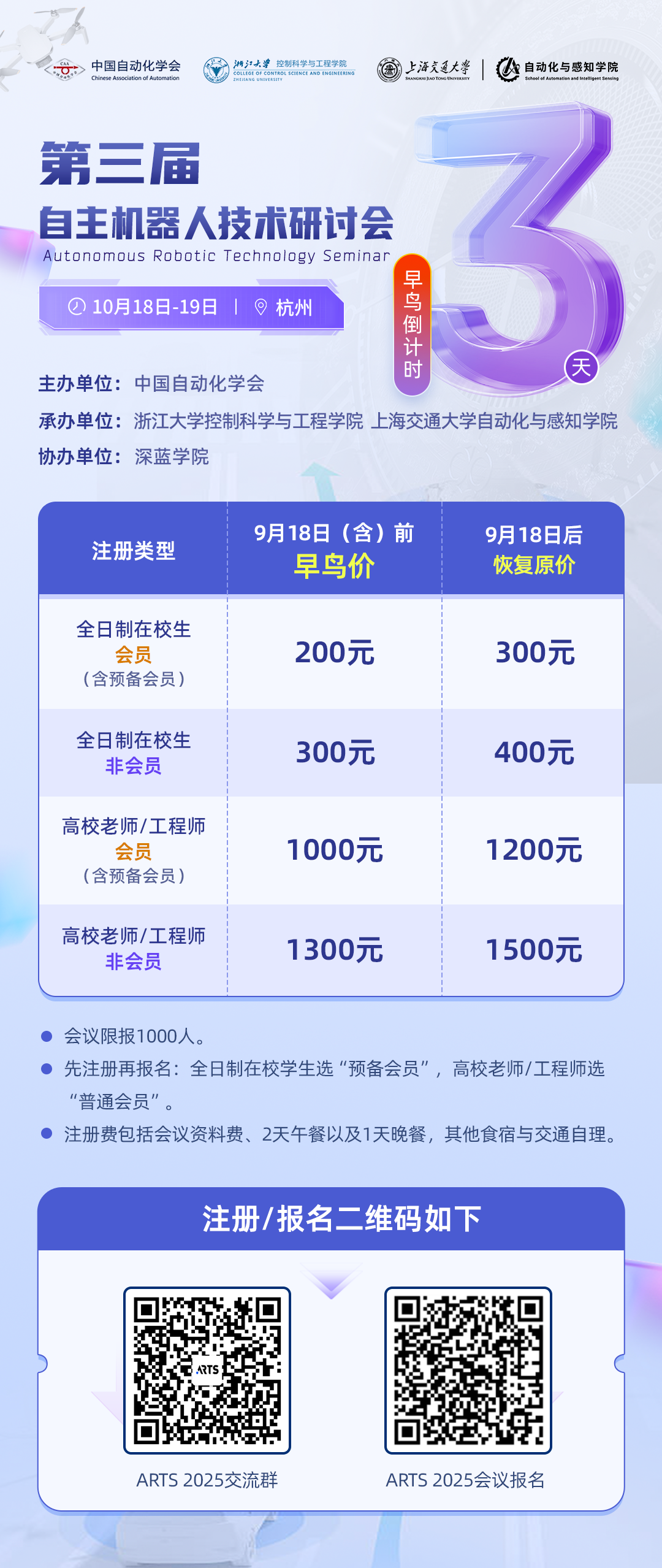
第三届自主机器人技术研讨会(ARTS)将于2025年10月18日至19日在杭州举行,会议规模预计1000余人。本次会议由中国自动化学会主办,浙江大学控制科学与工程学院、上海交通大学自动化与感知学院承办,深蓝学院协办。
ARTS倡导理性批判、敢于质疑、务实的科学精神,积极探索自由平等的思想交锋。ARTS主要关注传感与感知、自主导航、状态估计、移动机器人定位建图、运动规划、建模与控制、多机器人系统、具身智能、医疗仿生等方向。
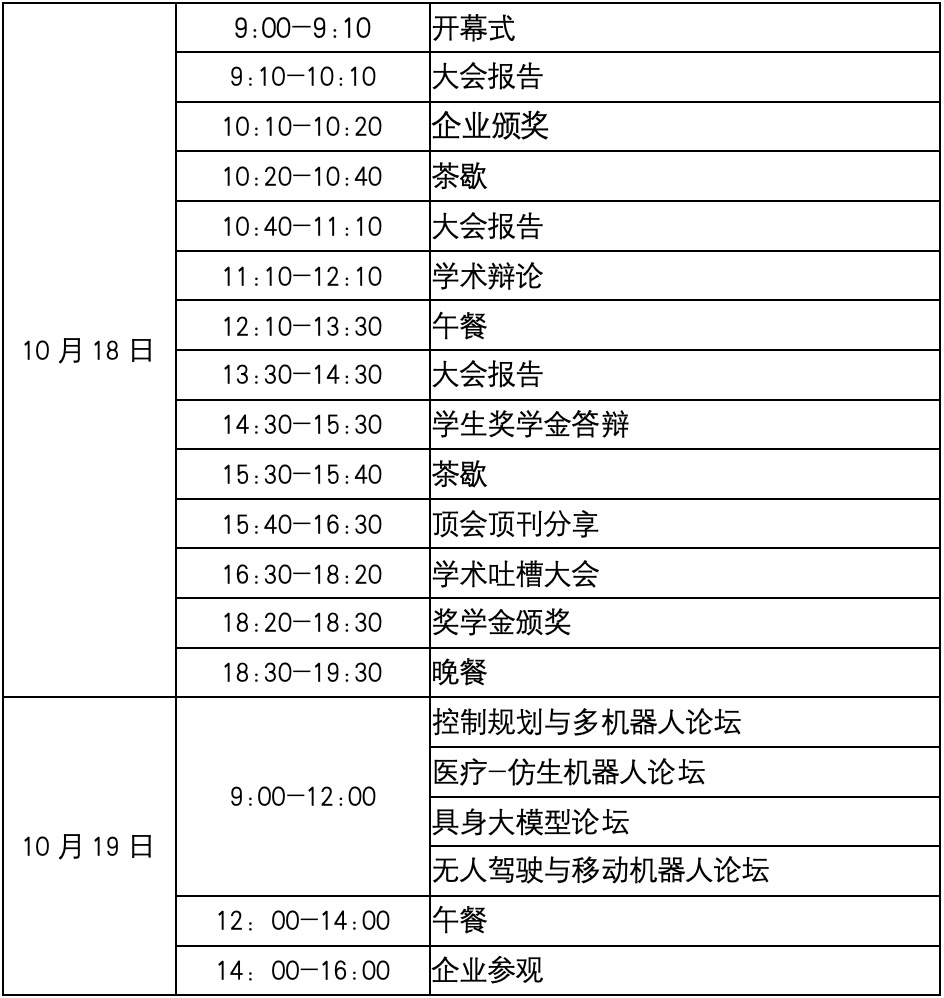
ARTS 2025为大家准备了6场由各领域专家带来的主旨报告,4场技术论坛(24位特邀嘉宾技术报告),学术辩论、“高手云集”的奖学金答辩、学术吐槽大会、顶会顶刊分享等。
目前会议注册通道已经开放。
早鸟票9月18日截止!时间紧迫,抓紧报名!


注:报告嘉宾按姓名首字母排序,排名不分先后

嘉宾简介&报告详情
注:报告嘉宾按姓名首字母排序,排名不分先后

个人简介:
报告主题:
报告摘要:
受限于机载感知与计算资源,无人机在复杂动态环境中的自主飞行与集群协同仍面临严峻挑战。传统感知-规划-控制架构易受模块间累积误差和系统延迟影响,难以支撑高速敏捷飞行;而基于模仿学习或强化学习的方法则常受限于专家数据获取困难与训练样本效率低下的问题。本次报告将介绍团队提出的基于可微分物理建模的端到端训练范式,通过将无人机动力学嵌入学习过程,显著提升样本效率并支持梯度引导的高效优化。基于该框架,我们发展了面向深度图与单目视觉的高速避障算法,首次实现了单目条件下的高机动自主飞行,并在无需真实数据微调的情况下,达成从仿真到真实环境的零样本迁移,为轻型无人机在复杂场景中的鲁棒自主飞行提供了高效、可扩展的新路径。

个人简介:
报告主题:
报告摘要:
传统无人机往往难以在丛林、楼宇及洞穴等典型导航拒止环境下进行正常作业,然而该环境下无人系统的搜索救援、侦察预警及目标捕捉等研究工作具有重要的军事和民用价值。报告聚焦无人系统复杂环境下的协同探测和目标追踪,从复杂环境下多无人系统定位的协同性、调度的高效性、轨迹的安全性及控制的鲁棒性角度出发,重点对多无人机协同定位技术、基于路图的多无人机协同决策调度技术、随机模型预测路径积分的多无人机实时运动规划技术、多变量干扰补偿的飞行控制技术及基于YOPO的无人机敏捷追踪技术进行介绍,在此基础上对未来研究工作进行展望。

个人简介:
报告主题:
报告摘要:
认知导航通过与环境持续交互实现学习和演进,是导航技术、认知科学、人工智能等前沿领域与应用场景深度交叉融合的导航新范式。本报告将探讨如何让机器人像人类一样,利用多模态信息进行空间感知与理解,并在此基础上通过与环境交互不断学习行为策略,从而实现更高层次的认知导航。报告内容将重点介绍认知导航的概念及内涵,分析空间感知与行为学习对实现认知导航的重要意义;介绍在空间感知与行为学习相关领域取得的研究进展;针对开放环境面临的新挑战,探讨未来发展趋势。

个人简介:
报告主题:
报告摘要:
模型预测控制(MPC)与强化学习(RL)在移动机器人决策与控制中的应用日益广泛。如何融合MPC的滚动时域优化机制与RL的闭环策略设计能力,是一个重要的研究问题。本报告以移动机器人为重点研究对象,重点介绍我们在学习型预测控制、控制论驱动的强化学习、多机器人可扩展策略学习等方面的理论与应用研究进展。

个人简介:
他积极开源,推动社区发展。相关研究代码在GitHub上累计获得超过7.5k stars,其中他一作主导的FAST-LIVO系列算法获得了5.4k stars,并被学术界与工业界广泛采用,各平台视频播放量已超过39.8万次。近期,他入选华为“天才少年”计划,即将加入华为云从事具身智能相关研究。
个人主页:https://zhengchunran.com
报告主题:
报告摘要:
在过去的几年中,随着传感器成本降低,激光雷达与相机已成为空间智能中最主流的传感器组合,基于二者在端侧融合的感知方案,已在各类任务中展现出巨大潜力。然而,要真正实现“1+1>1”的定位与重建效果,必须对二者的观测进行紧密耦合与高效利用,这对整个系统提出了极高挑战。本报告将重点探讨以下三个方面:其一,如何在实验场景中构建高效易用的激光视觉“标定间方案”;其二,如何维护一个统一地图以管理异构的激光与视觉测量;其三,如何在测量层面高效紧耦,使系统能够获得接近像素级的位姿精度。同时,我们将展示基于激光视觉融合的下游应用,包括机器人在极端退化场景下的自主导航、真彩色Mesh重建、3DGS、以及物体级语义地图重建。

个人简介:
报告主题:
报告摘要:
近年来,个体车辆的环境感知能力显着提升。 然而,实际驾驶场景比现有数据集复杂得多,并且具有挑战性。 因此,仅仅依靠单一车辆的视角并不能满足全自动驾驶的基本需求。
与单车感知相比,车联网之间的协作有望带来更全面、更准确的环境感知。 本次报告我们将介绍多车辆、多视角、多信息源信息融合的研究进展。 此外,现实世界中的不确定因素,如恶劣的路况或极端天气,也会影响传感器采集数据的质量,导致感知算法的输出异常。因为我们提出一种基于改进BEV的融合框架,提升对远距离目标的感知精度。同时,我们进一步探索一种能够有效利用现有通信条件的融合框架,有效降低了通信带宽使用,并保证了感知性能。 此外,我们还实现了基于跨模态融合的模态灵活知识蒸馏,旨在提升现实世界利用多模态融合感知的泛化能力和训练效率,提高自动驾驶车辆应对现实环境变化的能力和可靠性。 还将讨论互联智能支持的合作感知的未来研究方向。
(最终排序以会议会刊内容为准)
更多嘉宾阵容:

中国自动化学会会员注册链接: https://www.caa.org.cn/Content/10.html ARTS 2025会议注册链接: https://www.cacpaper.com/register/142/user/preRegist
全日制在校生参会时,需带学生证,便于现场确认。
了解线下会议详情
请扫码加入【ARTS 2025 交流群】
会议举行一周前(10月11日23:59前)可申请退费;会议举行一周内(10月12日00:00后)申请退费或未参加会议不予退款。
如需退费,请联系会议组成员并发送姓名、手机号码、注册时间、退款原因等信息到会务组邮箱:liyuanyuan@shenlanxueyuan.com。
此外,若因注册信息填写错误等情况而需重新缴费,请联系会议工作人员,电话同微信:19016985878。
注:退费申请审核通过后,开具的电子发票将作废,请勿使用。退费将在会后开始办理。
联系电话:19016985878(同微信)
联系邮箱:liyuanyuan@shenlanxueyuan.com
联系邮箱:caa@ia.ac.cn










