
儿童脊髓损伤患者的感觉康复因神经系统持续发育而具有挑战性。这些感觉问题会导致受损肢体的使用频率下降,影响了其进一步康复。本研究介绍了一种软纳米膜传感器支持的可穿戴手套系统,该系统能够无线传递手部的触觉感觉,并提供触觉反馈响应,以辅助感觉障碍康复。相关研究成果已发表在《ACS Nano》期刊上。
01
研究背景
创伤性脊髓损伤(Traumatic spinal cord injury,TSCI)是指由于脊柱受到突发性创伤冲击而导致的椎骨或脊髓损伤,全球普遍认为其是导致发病率和死亡率的重要因素,显著影响生活质量。TSCI可能引发神经病理性疼痛,包括运动或感觉缺损,如感觉减退或感觉异常,这些都是身体部位的感觉功能障碍。在儿童阶段,TSCI可能源于多种创伤事件,包括摇晃婴儿综合征、体育运动损伤、跌倒、机动车事故或暴力行为。然而,与成人相比,儿童群体中的TSCI呈现出独特的挑战,因为他们的身体系统尚未完全发育,因此恢复的效果可能受到影响。然而,这些感觉挑战常常导致对受影响肢体的拒绝使用和不平衡的运动,从而进一步复杂化康复过程。这可能导致额外的身体或心理问题,这些问题在早期儿童发展过程中可能持续存在甚至恶化。目前的方法通常涉及将健康神经移植到感觉丧失受影响的区域,但这些方法通常成本高昂且具有侵入性。因此,迫切需要寻找替代策略,这些策略应更少侵入且更符合儿童在感觉康复方面的需求。最近,可穿戴和柔性电子产品已经出现并扩展到各种具有纳米膜结构的设备中。这些纳米膜电子设备采用了各种材料开发而成,如贵金属、导电聚合物和碳材料,具有柔性、超薄、可拉伸性和轻便等特性。这些特性对于可穿戴传感设备尤为有利,可提供高灵敏度、快速响应时间和多功能性。
02
研究概述
本研究介绍了一种软纳米膜支持的可穿戴多模态传感反馈手套,它是一种同时具有触觉传感和触觉反馈功能的系统,旨在帮助 TSCI 患者进行日常手部康复训练。该系统从外部向患者提供手部感觉反馈,促进康复。手套集成了多模态传感器,可检测拇指、食指和中指的多模态手部感觉(压力、温度和手指弯曲),从而补偿患者的感觉障碍。这些传感器采用纳米膜电子元件制造,具有超薄、轻便和舒适的设计,其设计基于前沿的可穿戴技术,凭借其特性和灵活的电子元件,集成传感器的可穿戴手套显示出超轻和紧凑的设计,适用于小儿手部康复。然后,可穿戴式多模态触觉反馈系统可持续收集触觉数据并将其无线传输为触觉反应。这一集成传感器-执行器系统的性能在实际应用场景中得到了验证,系统反应清晰可辨。凭借有潜力的可穿戴设备和多模态反馈能力,多模态传感反馈手套为解决感官障碍和治疗 TSCI 患者提供了潜在的方向。
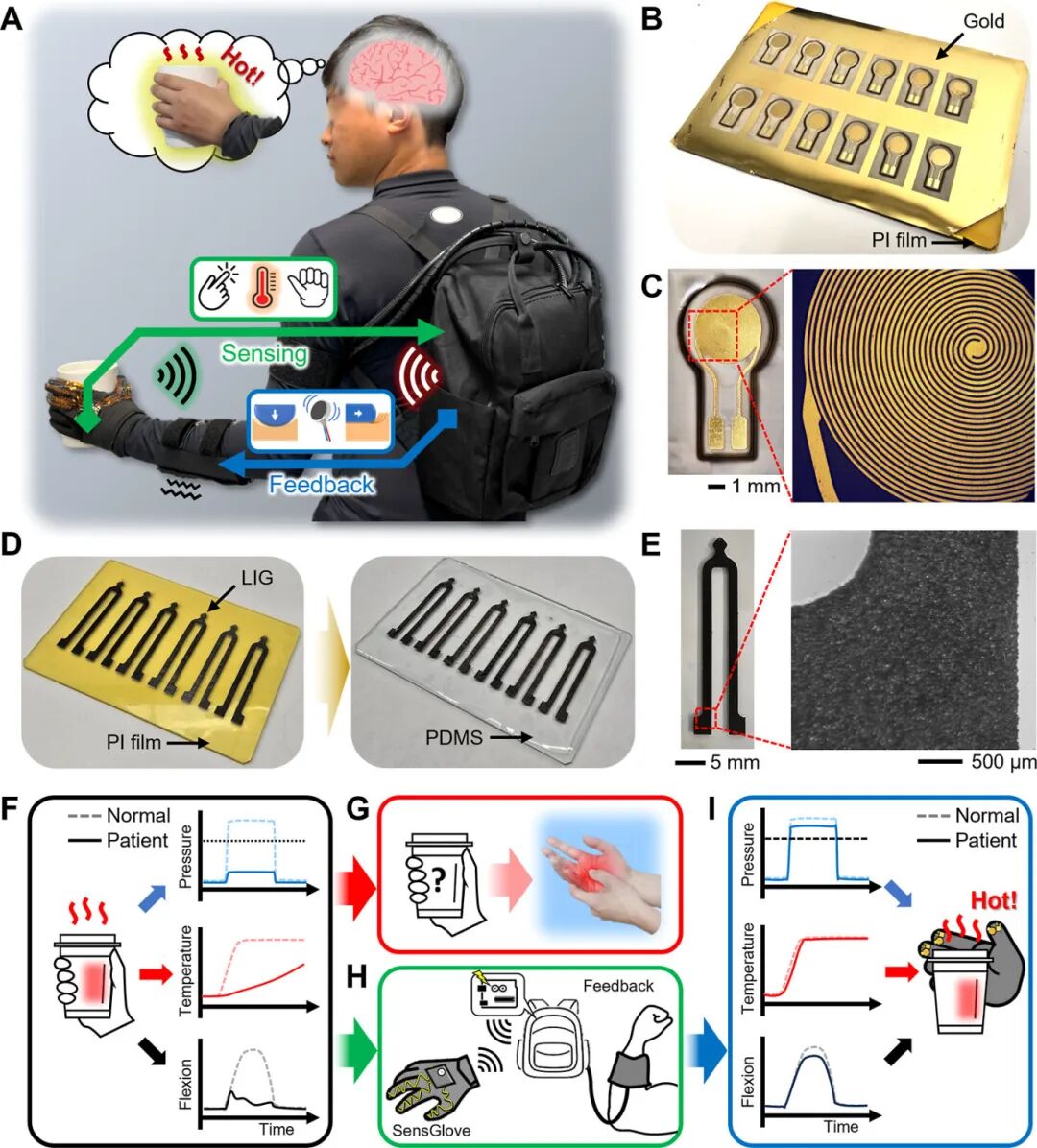
图1. 一种使用各种纳米材料辅助上肢感觉损伤的软穿戴多模式传感手套和反馈系统。(A) 集成系统的图示,包括手套中的可穿戴多模式传感器和带状触觉反馈系统。(B,C)阵列(B)和单个传感器(C)中制造的纳米膜温度传感器的照片。(D) 用于可穿戴多模式传感手套的基于LIG的应变传感器。(E) 所制造传感器的放大照片。(F) 示意图显示了正常人和患者之间感知能力的差异,可能会对患者造成(G)意外伤害风险。(H) 软穿戴多模式传感手套与反馈系统之间的无线通信示意图。(I) 插图显示了可穿戴系统使用纳米膜传感器检测压力、温度和弯曲的能力。
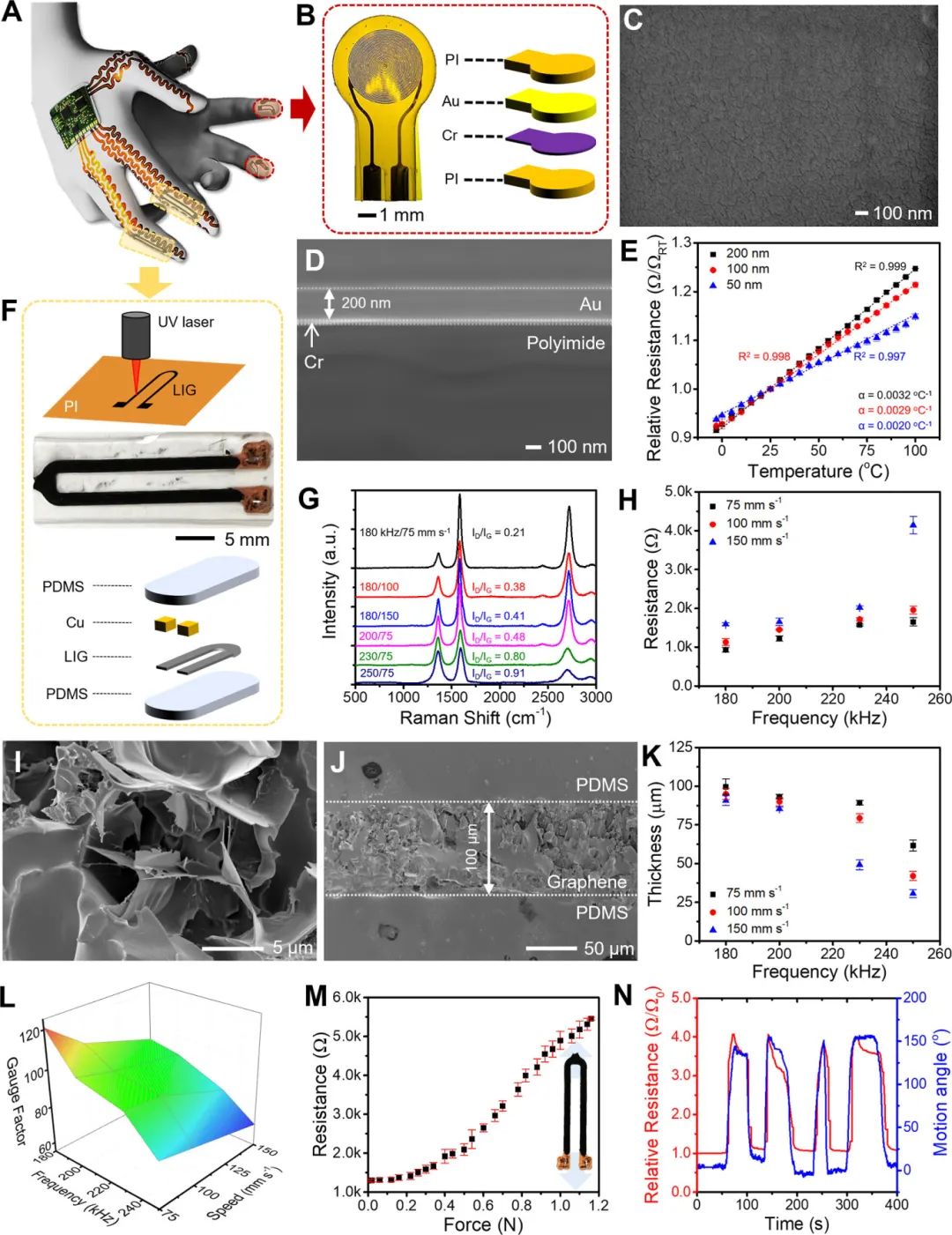
图2. 用于触觉感知的可穿戴多模式传感手套的设计。(A) 集成纳米膜压力、温度和应变传感器的可穿戴系统的图示。(B) 电阻式温度传感器的详细结构。(C) 扫描电子显微镜(SEM)显示了聚酰亚胺上200 nm厚Au膜的俯视图和(D)横截面图像。(E) 多个温度传感器根据温度变化的相对电阻。(F) 基于LIG的应变传感器的详细结构。(G) 不同激光频率和扫描速率下应变传感器的拉曼光谱和石墨烯D/G峰比。(H) 应变传感器在不同激光频率和扫描速率下的电阻变化。(I) LIG传感器在180 kHz和75 mm s(-1)制备条件下的俯视图和(J)横截面图像。(K) 应变传感器上LIG的厚度差异。(L) 不同制造条件下应变传感器应变系数的3D映射图像。(M) 应变传感器根据力的电阻响应。(N) 弯曲手指时应变传感器的相对电阻变化。
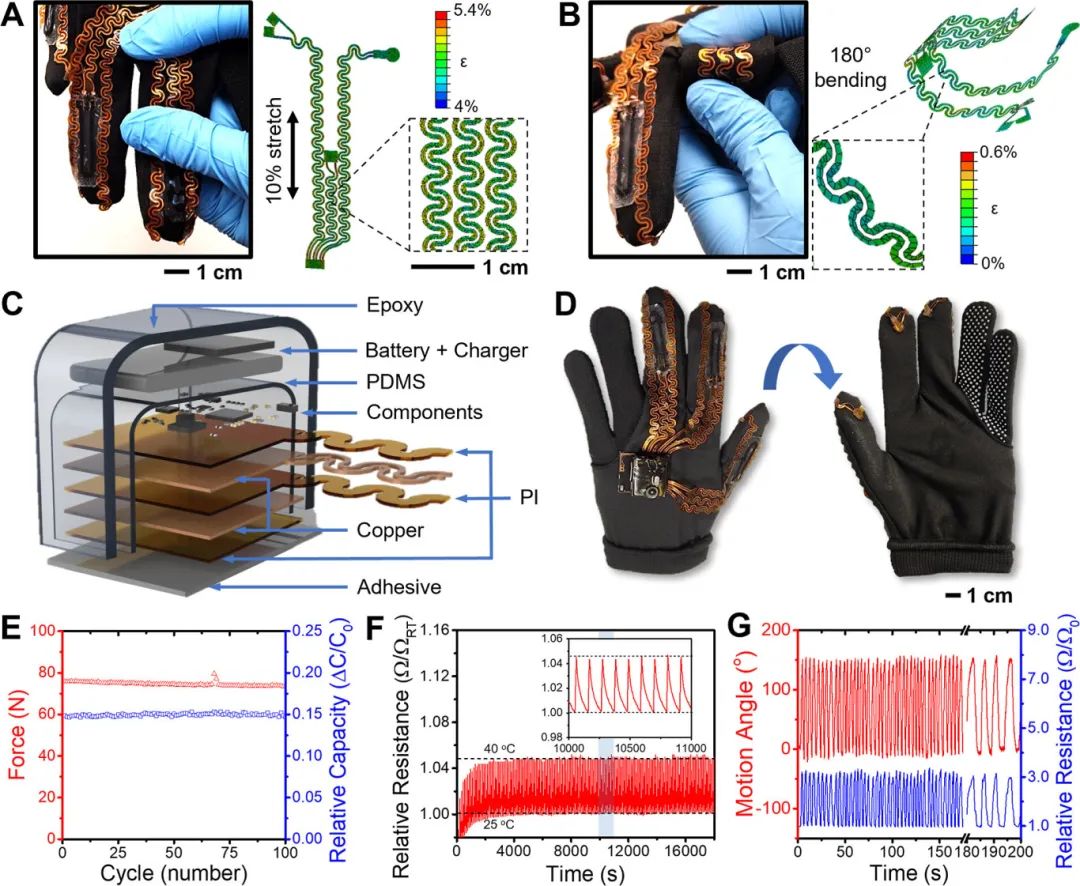
图3. 可穿戴多模式传感手套的机械特性。(A,B)施加10%拉伸应变(A)和180°弯曲(B)时可拉伸互连器的实验研究和计算建模的比较。(C) 显示使用多层结构和电子元件的无线集成电路的图示。(D) 照片显示,手套正面装有集成电子设备,背面装有薄膜传感器。(E) 压力传感器在施加压力变化时性能的长期稳定性。(F) 微螺旋温度传感器在25至40°C温度变化下的长期稳定性。(G) 可穿戴多模式传感手套手指屈曲弯曲和应变传感器电阻变化的比较。
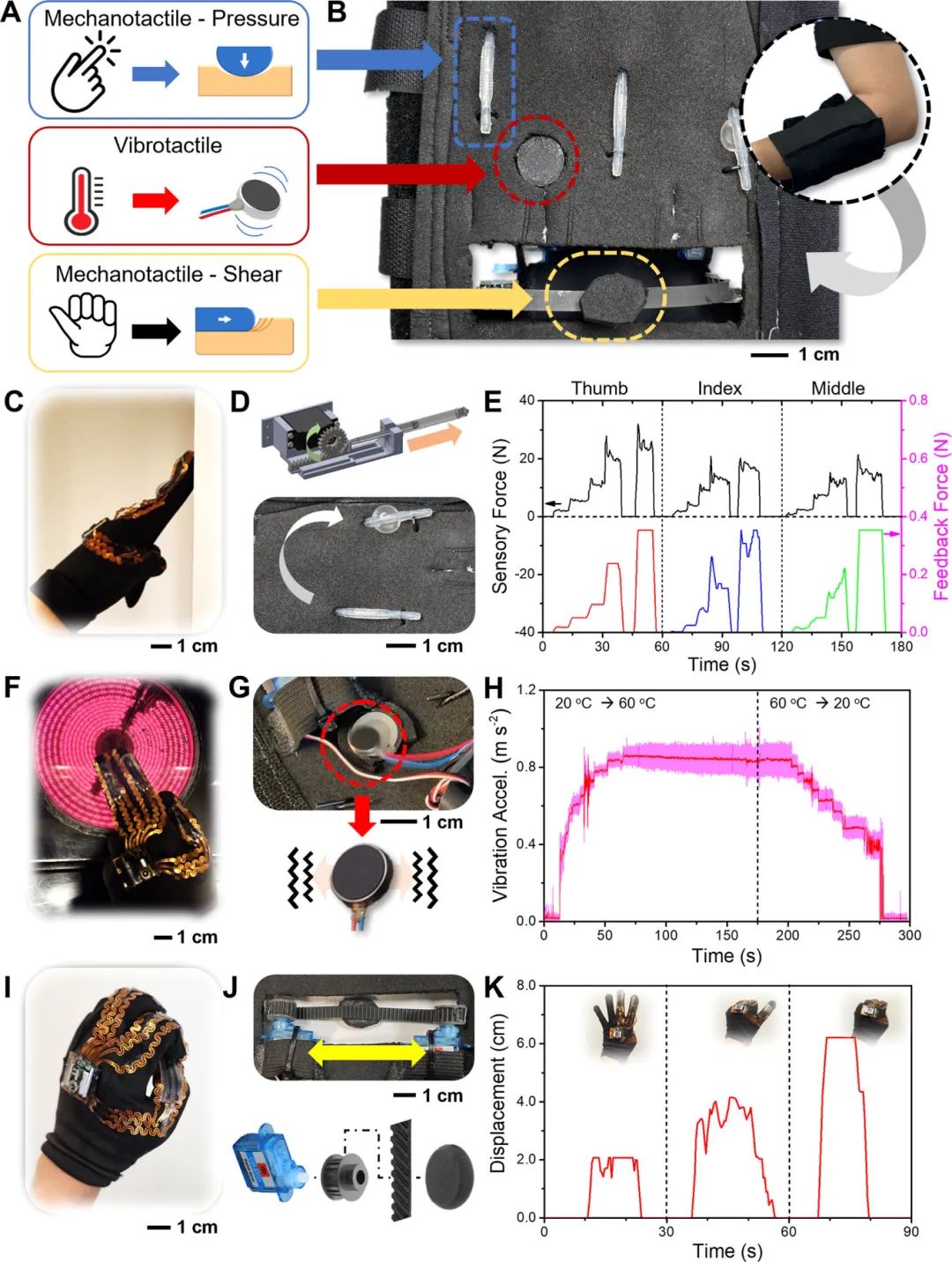
图4. 触觉反馈系统的设计和表征。(A) 描述可穿戴传感手套的每个信号的反馈响应的转换类型。(B) 带集成执行器的尼龙搭扣带。(C) 照片显示了用手套推墙的活动。(D) 机械触觉压力执行器的操作机构。(E) 感觉力输入和响应反馈力之间的比较。(F) 照片显示了用手套触摸热表面的活动。(G) 振动触觉温度执行器的操作机制。(H) 振动触觉响应根据手套温度从20°C到60°C和60°C到20°C的变化而变化。(I) 照片显示了弯曲手指的动作。(J) 响应位移执行器的操作机构。(K) 当用不同手势移动手时,手指弯曲反馈的位移变化。
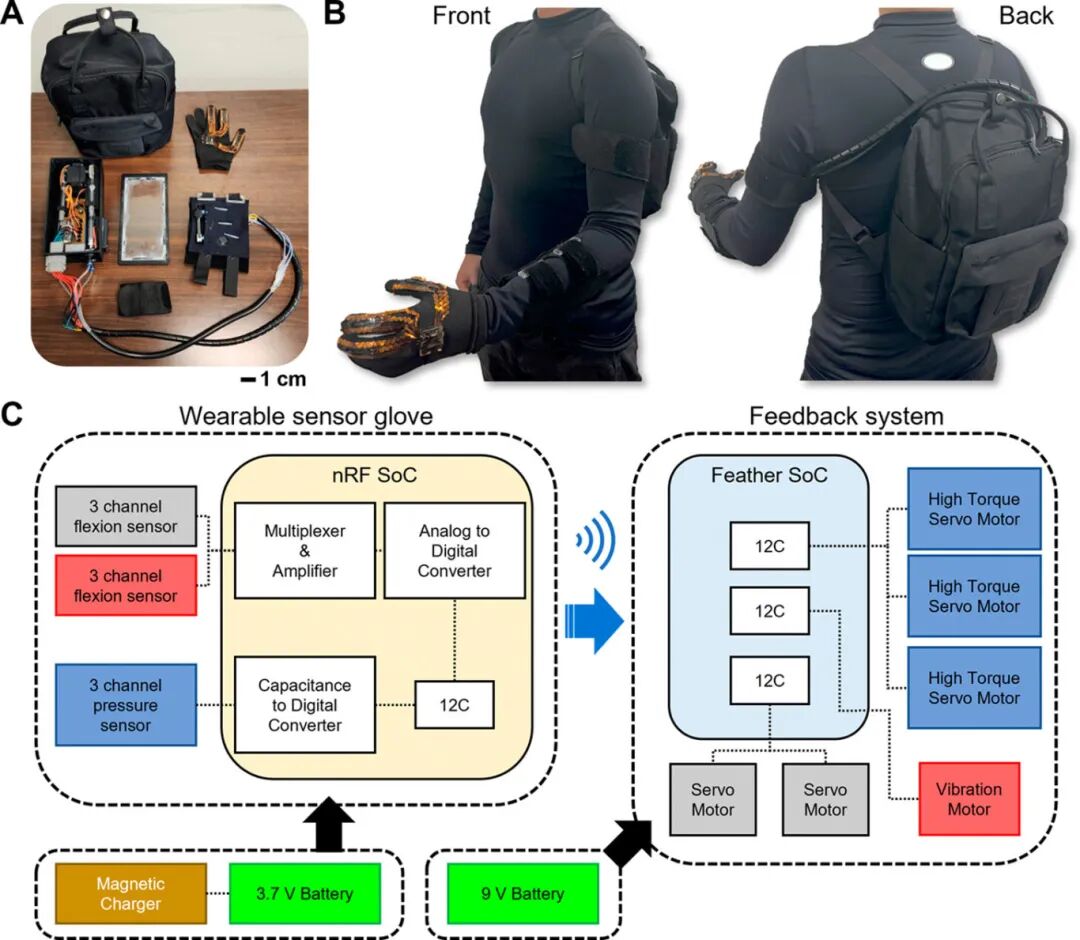
图5. 集成可穿戴多模式传感和反馈系统。(A) 可穿戴系统的照片,包括多模式传感手套、执行器套件和背包。(B) 用户左手戴手套时佩戴的可穿戴多模式传感反馈系统的前后图像。(C) 流程图显示了系统组件的概述、多个传感器的数据采集、向反馈系统的无线数据传输以及使用电机对反馈组件的相应驱动。
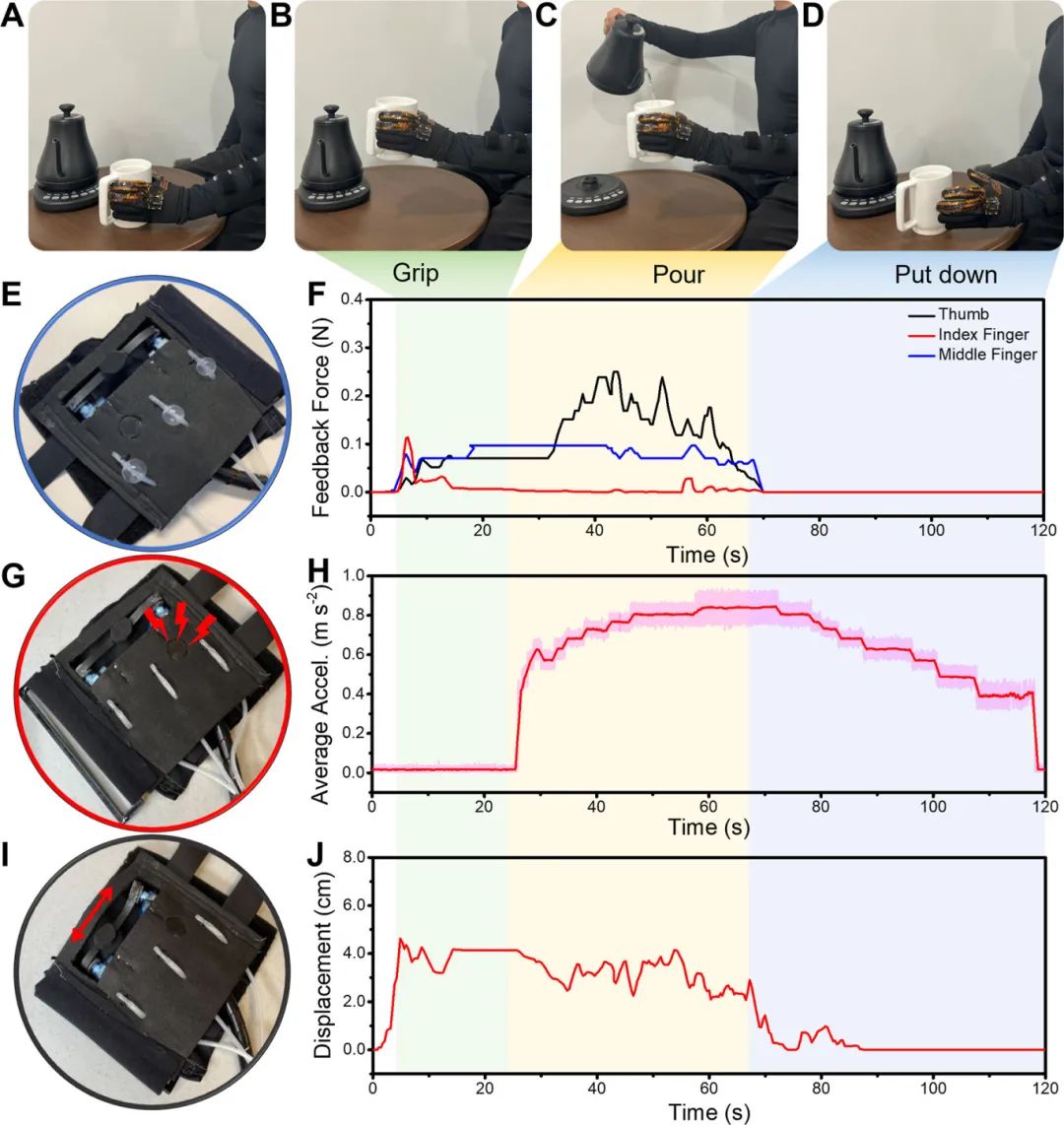
图6. 演示可穿戴多模式传感和反馈系统的实际应用。(A–D)照片显示了一个例子,其中戴着多模式传感反馈手套的受试者伸手去拿杯子,(B)抓着杯子,(C)倒热水,(D)把杯子放在桌子上。(E) 机械触觉压力反馈响应的照片和(F)在顺序动作(A-D)期间测量的反馈力。(G) 振动触觉温度反馈响应和(H)热杯抓握引起的振动加速度变化的照片。(I) 手指弯曲的位移响应照片和(J)测量的位移反馈。
03
研究意义
该研究展示了一种集成了纳米膜传感器的可穿戴多模态手套,以及一个触觉反馈系统,用于协助创伤性脊髓损伤(TSCI)患者进行上肢感觉障碍康复。通过将纳米材料、柔性传感器、柔性电子器件和薄型执行器集成到手套中,作者开发出了一种让佩戴者感觉舒适且能高效提供多模态感觉反馈的系统。封装后的传感器和执行器具有更优的材料特性,确保了在多次重复循环下能有效传递多感官信息,压力传感器在连续100次循环后准确率达98%,能实现全面的温度感知,手指弯曲一致性达96.6%。凭借更高的可靠性和连通性,该触觉系统能将感觉输入转化为即时的增强反馈,这对实时康复训练至关重要。这种可穿戴多模态传感反馈手套在支持各种日常活动方面展现出了有效性,是促进上肢康复的高效工具。此外,这种可穿戴多模态传感反馈手套还可应用于其他需要手部康复的感觉障碍患者。该系统的强大性能和精确的感觉反馈凸显了其作为可穿戴康复技术重大进展的潜力。
文章来源:
Kang TW, Lee YJ, Rigo B, Soltis I, Lee J, Kim H, Wang G, Zavanelli N, Ayesh E, Sohail W, Majditehran H, Kozin SH, Hammond FL 3rd, Yeo WH. Soft Nanomembrane Sensor-Enabled Wearable Multimodal Sensing and Feedback System for Upper-Limb Sensory Impairment Assistance. ACS Nano. 2025 Feb 11;19(5):5613-5628. doi: 10.1021/acsnano.4c15530.
来源:BME康复工程分会
仅用于学术分享,若侵权请留言,即时删侵!


