前言:笔者主要是对标题内容一系列的论文和纸等收集整理和总结,便于大家在设计过程中集中参考!其中大部分论文都是包含图纸的,少部分只有论文或者只有图纸(声明:部分总结内容或图片可能使用AI工具优化!),若有不全的地方请见参考资料!(注:参考资料见文末)
一、三自由度圆柱坐标型工业机器人设计
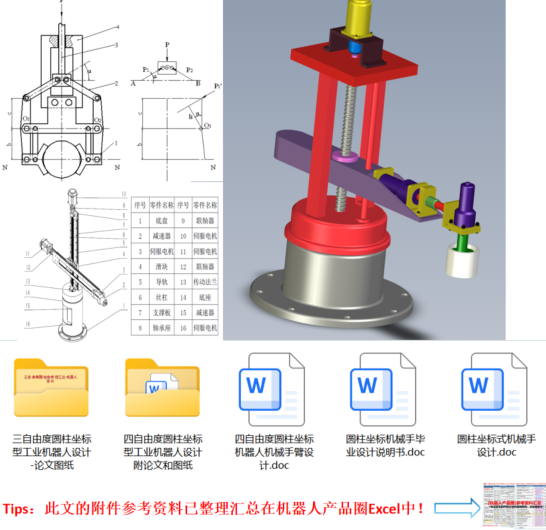
主要包括了设计说明书、三维模型(Creo格式)、AutoCAD图纸、幻灯片ppt、机构简图、零件图和动画仿真等

总体方案拟定
在工业机器人的诸多功能中,抓取和移动是最主要的功能。这两项功能实现的技术基础是精巧的机械结构设计和良好的伺服控制驱动。本次设计就是在这一思维下展开的。根据设计内容和需求确定圆柱坐标型工业机器人,利用步进电机驱动和谐波齿轮传动来实现机器人的旋转运动;利用另一台步进电机驱动滚珠丝杠旋转,从而使与滚珠丝杠螺母副固连在一起的手臂实现上下运动;考虑到本设计中的机器人工作范围不大,故利用液压缸驱动实现手臂的伸缩运动;末端夹持器则采用内撑连杆杠杆式夹持器,用小型液压缸驱动夹紧。
1、说明书一览


2、答辩ppt


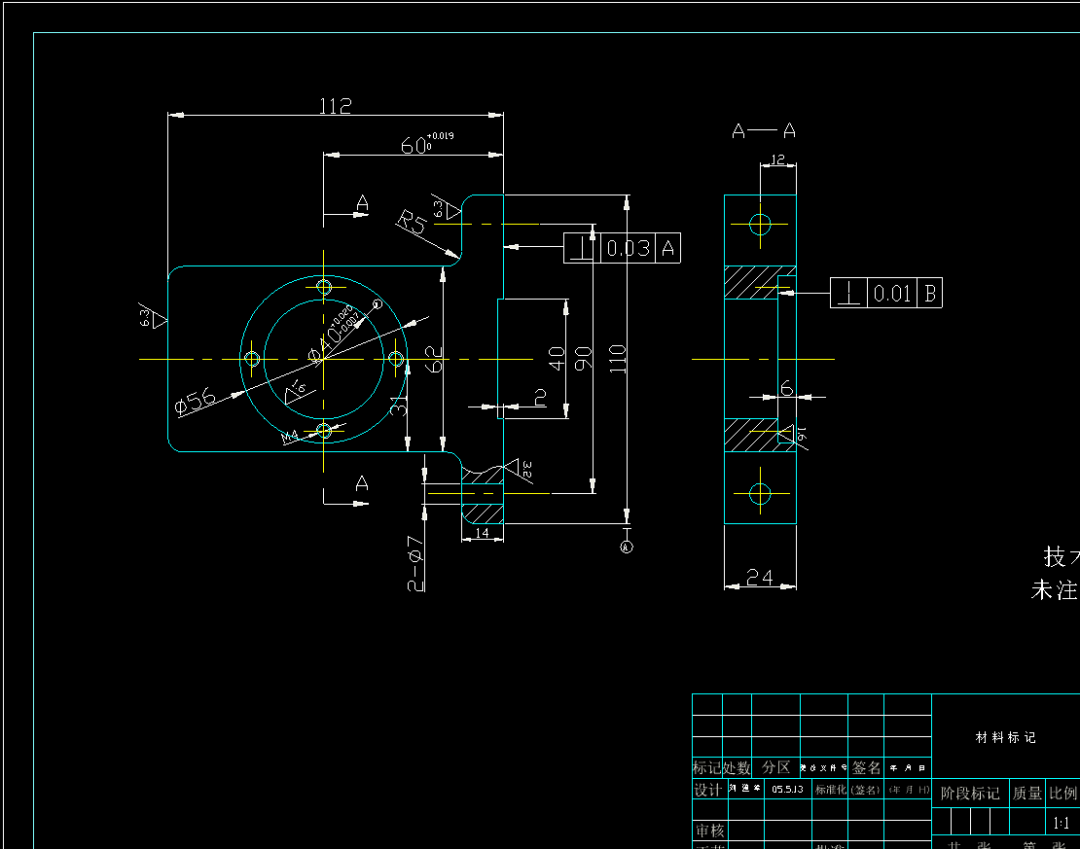
3、三维模型和图纸




二、四自由度圆柱坐标型工业机器人设计附论文和图纸




其它圆柱机器人机械手



参考资料(已汇总在Excel里,按文章标题关键字查找自取!)

\三自由度圆柱坐标型工业机器人设计-论文图纸
\圆柱坐标型工业机器人设计附论文和图纸
\四自由度圆柱坐标机器人机械手臂设计.doc
\圆柱坐标机械手毕业设计说明书.doc
\圆柱坐标式机械手设计.doc


Tips2:评论区留言所需资料,找到就发出来!