摘要
Abstract
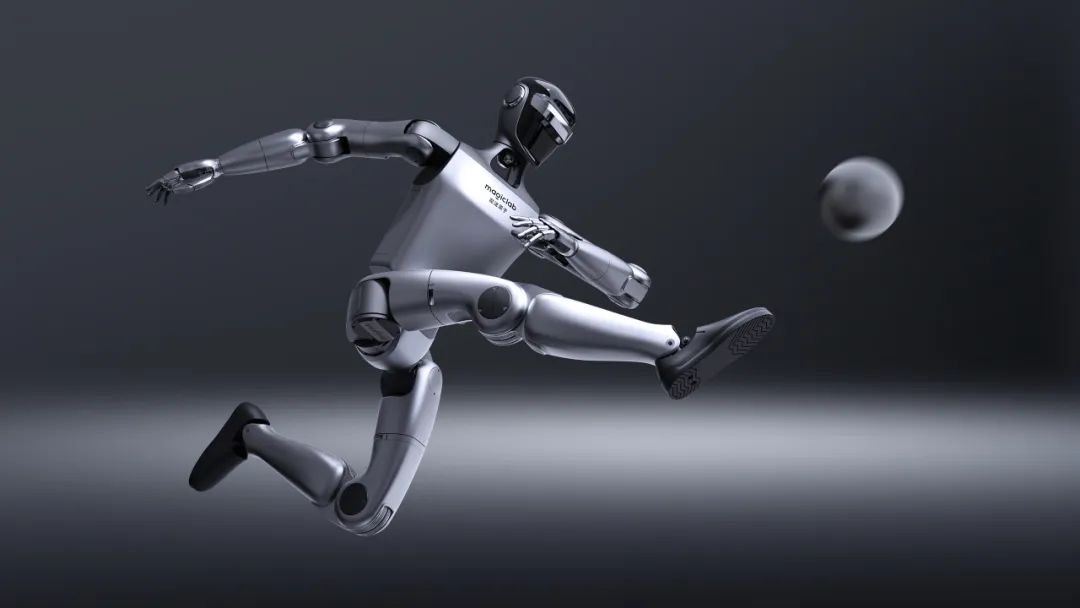
魔法原子(MagicLab)发布旗下新款双足人形机器人MagicBot Z1,通过“高性能可靠本体+开放AI生态系统+丰富场景落地应用”三位一体,定义人形机器人产品价值新维度。
MagicBot Z1性能强劲,灵活迅捷,其拥有自研高性能关节模组,24基础自由度,最多可扩展至49自由度;关节最大扭矩超过130N.m,可实现“大扰动冲击恢复”、“连续倒地起身”等高爆发运动;关节运动范围最大可达320°,支持“下腰”等高难度及大幅度动作,为行业落地应用中的机器人功能二次拓展开发,提供坚实硬件保障。
本体优异,结实抗造。MagicBot Z1采用高强度铝合金和工程塑料,通过拓扑优化和正向分析设计,持续强化机器人身体素质,提升机器人抗摔、抗磨损能力,使其具备超强耐用性,跌倒撞击下依然稳定可靠。针对紧凑型人形机器人散热问题,MagicBot Z1利用热仿真技术,不断优化整机结构与风道设计,让内部温度始终保持在合适区间,确保机器人长时间稳定性能输出。稳定可靠,是实际落地应用中,最基本的产品准则。
MagicBot Z1配备丰富传感器,满足多元场景应用需求,其配备3D激光雷达、深度相机、双目相机等传感器,搭载魔法原子定位导航系统,可实现在复杂场景中的自主移动。开发者可利用丰富传感器,面向家庭陪伴、商业讲解、特种应用等多场景,迅速开发面向行业应用的技能库,提升人形机器人的智能操作与交互能力。

开发者平台智能便捷。在魔法原子多源数据库加持下,开发者可在20分钟内掌握一套全新动作,不仅加速了机器人的训练速度,而且让动作更拟人。魔法原子还提供标准的机器人控制器,依托鲁棒的运动控制算法,Z1可以适应不同地形与环境,比如平地、草地、碎石、台阶等。超凡卓绝的全地形能力,保障了Z1作为移动智能体,在不同场景中的迅速落地作业能力。魔法原子多源数据库和标准控制器,助力开发者面向不同应用场景,加速开发自有控制器及应用案例,加快通用人形机器人进入千行百业。
MagicBot Z1具备拟人化情感交互能力,利用丰富的视觉和触觉感知信息,基于多模态交互,构建拟人化的交互系统。当用户与Z1互动时,轻触Z1头部,不仅可以语音交互,还可以生成拟人化动作,如扭头、招手等。它改变了机器人的冰冷形象,让机器人从工具进化为生活伙伴,提供暖心情绪价值。

作为集世界感知、全身运动、灵巧操作、物理交互于一体的超级具身智能体,Z1树立了人形机器人行业新的产品标杆,为科研教育、商业服务、工业操作、家庭陪伴等场景提供高价值解决方案。
为满足不同用户需求,魔法原子MagicBot Z1提供标准版和开发版两大系列。标准版提供机器人基础运动能力,为机器人爱好者、科技玩家提供入门级科技体验。开发版系列,根据开发者自身需求,可以选装灵巧手、高性能算力包、增加手臂自由度等,满足开发者进行不同课题研究或实现展览文旅、商演娱乐等更丰富行业场景的应用,让创新应用探索更自由。
"MagicBot Z1不是简单的技术堆砌,而是对'智能体'概念的重新诠释。"魔法原子总裁吴长征表示,"我们相信,真正有价值的人形机器人应该像MagicBot Z1这样,既具备超越人类的运动能力,又具备灵巧作业能力,智能感知与交互的大脑。我坚信MagicBot Z1将助力魔法原子打造进一步落地的工业、商业与家庭应用场景,让广义机器人服务地球每一个角落。"

咨询&购买:
邮件:bd@magiclab.top 官网:magiclab.top

往期文章
全球首篇自动驾驶VLA模型综述重磅发布!麦吉尔&清华&小米团队解析VLA自驾模型的前世今生
字节跳动Seed实验室发布ByteDexter灵巧手:解锁人类级灵巧操作
具身专栏(三)| 具身智能中VLA、VLN、VA中常见训练(training)方法
具身专栏(二)| 具身智能中VLA、VLN分类与发展线梳理
具身专栏(一)| VLA、VA、VLN概述
π0.5:突破视觉语言模型边界,首个实现开放世界泛化的VLA诞生!
斯坦福&英伟达最新论文:CoT-VLA模型凭"视觉思维链"实现复杂任务精准操控
RoboTwin2.0全面开源!多模态大模型驱动的双臂操作Benchmark ,支持代码生成!
开源!Maniskill仿真器上LeRobot的sim2real的RL训练代码开源(附教程)
迈向机器人领域ImageNet,大牛PieterAbbeel领衔北大、通院、斯坦福发布RoboVerse大一统仿真平台
CVPR 北大、清华最新突破:机器人操作新范式,3.3万次仿真模拟构建最大灵巧手数据集
人形机器人四级分类:你的人形机器人到Level 4了吗?(附L1-L4技术全景图)建议收藏!
斯坦福最新论文:使用人类动作的视频数据,摆脱对机器人硬件的需求
爆发在即!养老机器人如何守护2.2亿老人?产业链+政策一览,建议收藏!