【区角快讯】波士顿动力公司于2026年2月7日发布最新进展,其研发的Atlas人形机器人成功完成连续空翻动作。在公开视频中,该机器人展现出高度协调的肢体运动与稳定的着地控制,标志着人形机器人在动态平衡与复杂动作执行方面达到新高度。
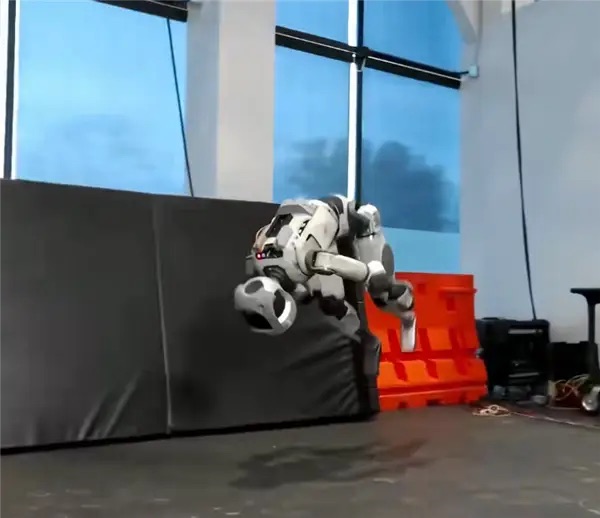
整个连续空翻过程流畅连贯,每一次腾空、翻转及落地均自然衔接,充分体现了其卓越的动态稳定性。除空翻外,Atlas目前已掌握跑步、爬行以及部分街舞动作,运动技能库持续扩展。
值得注意的是,在不久前的CES 2026展会上,Atlas首次走出实验室进行现场演示,却在后空翻环节出现意外:落地时姿态失衡,如同“扭到脚”,甚至导致一只机械手上的零件脱落。此次成功完成连续空翻,被视为其运动控制能力快速进化的有力佐证,也为人形机器人具身智能的实际应用提供了更直观的范例。
据官方介绍,Atlas整机高度接近1.9米,具备50公斤的负载能力,并可在-20℃至40℃的工业环境下稳定运行。其全身配备56个自由活动关节,其中多数支持360°旋转,无需频繁调整身体姿态即可高效执行多样化任务。
当前,人形机器人正从“炫技展示”加速转向“能力验证”阶段,而Atlas的持续进化,正推动这一领域向真实作业场景纵深迈进。