编辑丨具身智能之心
本文只做学术分享,如有侵权,联系删文
>>
更多干货,欢迎加入国内首个具身智能全栈学习社区:(戳我),这里包含所有你想要的。
让机器人像人类一样,连贯完成“移动到目标旁、精准执行操作”的动作,是具身智能从实验室走向真实场景的核心诉求——这正是Loco-Manipulation(移动Locomotion与操作Manipulation的融合)的价值所在。它绝非两种能力的简单叠加,而是机器人突破“专用工具”局限、成为“场景助手”的必经之路,其发展轨迹,本质上是人类不断破解机器人“适配开放世界”的过程。
Loco-Manipulation的出现绝非偶然,而是机器人技术演进的必然结果。早期机器人研究陷入“分工割裂”的困境:移动机器人(轮式、履带式)能导航避障,却无任何操作能力;固定机械臂能完成高精度操作,却无法移动半步。这种分离设计在标准化工业场景尚可勉强适配,但当应用延伸至家居、服务等开放场景,短板瞬间凸显——我们无法为每个物体配备专属机械臂,也不可能让移动机器人只承担“运输员”角色。从家居取物到服务助老,所有真实需求都指向一个核心:机器人必须实现移动与操作的协同,Loco-Manipulation由此应运而生。
但协同之路并非一帆风顺,Loco-Manipulation的演进始终围绕“破解动态耦合难题”展开。最初的“拼接式”尝试的——先移动、后操作——本质上仍是能力分离:移动到位后物体偏移需重新调整,操作时重心失衡无法实时修正,核心问题在于未意识到:移动与操作是相互影响的整体——移动改变操作空间与重心,操作的力反馈反过来影响移动稳定性,二者必须实现时空维度的实时协同。
随着控制理论、机器学习与基础模型的相继突破,Loco-Manipulation逐步迭代出两大核心技术范式,每一次迭代都直指前一阶段的核心瓶颈,是技术发展的必然选择。
第一类是“模型驱动的显式协同规划”。早期研究者依托物理动力学理论,将机器人全身视为整体,构建包含质心平衡、接触力约束的动力学模型,通过MPC、QP等优化算法,同步规划移动与操作动作。这种方式稳定性强、可解释性高,是工业落地的核心方案,但面对非平整地面、复杂接触等场景,精准建模难度陡增,计算复杂度也限制了实时性,为第二条路径埋下伏笔。
第二类是“学习驱动的隐式端到端融合”。随着强化学习、模仿学习的兴起,研究者放弃“手动设计协同规则”,让机器人通过数据自主学习多模态输入到联合动作的映射。这种方式无需精准建模,能适配复杂接触场景、泛化性更强,还可通过模仿学习迁移人类技能、降低训练成本,但数据需求大、模型“黑箱特性”带来的稳定性隐患,使其难以直接应用于工业级场景。
从“分工割裂”到“拼接尝试”,再到技术范式的迭代,Loco-Manipulation的每一步都在解决“适配真实世界”的核心痛点。它的发展不是偶然的技术突破,而是机器人走向实用化的必然选择——唯有实现移动与操作的深度协同,机器人才真正具备自主适应环境、完成复杂任务的能力。
基于这一演进脉络,本文精选8篇顶会/机构里程碑成果,从核心思路、技术创新、场景适配性维度深度解析,完整呈现Loco-Manipulation的技术全貌与前沿趋势。
代表性成果深度解析
Model-based(模型驱动):物理建模稳定可控,保障落地可靠
Model-based 是 Loco-Manipulation 的经典技术路径,根植于传统机器人学理论,核心围绕规划、优化、阻抗/力控、稳定性控制、在线自适应展开。该路径以物理规律为基础,通过精准建模与约束求解实现移动与操作的协同,典型特征为可解释性强、约束明确、稳定性可控,是工业级高精度、高安全性场景落地的主流方案;但受建模精度限制,工程调参与建模成本较高,泛化到非结构化、复杂开放环境的难度较大。
Versatile Multi-Contact Planning and Control for Legged Loco-Manipulation(Science Robotics 2023,ETH Zurich)
核心定位:多接触约束下的“通用移动操作规划器“,突破单一接触场景限制
技术背景:解决机器人与环境多接触点交互(如手推墙借力移动、脚踩不规则地面操作)的规划难题,突破传统单一接触场景的局限,适配开门、推重物、跨越障碍等复杂任务。

核心思路与创新:
-
双级优化规划架构:外层基于规则的启发式图搜索(剪枝无效接触切换),内层轨迹优化(结合采样-based 规划与优化算法优势),自动发现接触序列与全身轨迹; -
多接触状态建模:通过几何推理与物理仿真,预测机器人与环境的潜在接触点(机械臂-桌面、足部-地面等),构建接触状态图,支持抓握/非抓握混合交互; -
两阶段跟踪控制:离线规划生成高保真轨迹,在线采用 MPC+全身控制器的两层架构,跟踪轨迹并补偿建模误差与扰动。
关键成果:
-
真实 ANYmal 四足移动操作机器人实现多类任务:开启/关闭重型洗碗机(克服关节静摩擦)、转动阀门(支持多次重抓握)、跨越弹簧门(脚-手协同接触)、推动障碍物(臂/脚切换操作); -
规划耗时短(普通笔记本≤1 分钟),行为持续时间最长达 42 秒,硬件部署零手动调参,任务成功率达 90% 以上。
特点:
-
优势:复杂接触场景适配性强、物理一致性高、抗干扰能力突出,支持机器人/物体双中心任务; -
局限:规划耗时较单一接触方案长(约 200ms/步),对环境几何建模精度要求高,动态环境在线重规划能力有限。
Whole-Body Inverse Dynamics MPC for Legged Loco-Manipulation(RAL 2025,ETH Zurich)

核心定位:扭矩级全身 MPC 控制标杆,实现力-位协同的实时移动操作
技术背景:解决传统模型驱动方案依赖简化模型(质心动力学)导致的关节级动态可行性不足问题,突破扭矩级优化的实时性瓶颈,适配重载牵引、精准擦拭等力控需求场景。
核心思路与创新:
-
全阶逆动力学 MPC formulation:直接优化关节扭矩,通过递归牛顿-欧拉算法(RNEA)将全身动力学作为路径约束,统一规划移动轨迹与接触力,无需额外跟踪控制器; -
自适应时间步策略:采用几何级数时间步,早期细粒度(保证控制精度)、后期粗粒度(降低计算复杂度),平衡实时性与规划 horizon; -
多约束集成设计:融合接触约束(摩擦锥、零速度)、臂端约束(力/速度跟踪)、状态/输入边界(关节限位、扭矩限制),确保操作安全与精度。
关键成果:
-
真实 Unitree B2-Z1 四足操作机器人实现三大任务:行走中牵引 10kg 负载(突破机械臂额定负载)、推箱子靠墙(动态平衡保持)、白板擦拭(力控柔顺接触); -
MPC 实时性达 80Hz(编译后求解时间 12.5ms),位置跟踪误差 < 0.1m,力控误差 < 10N,扰动抑制能力强(基座位移扰动 0.8m/s 可快速稳定)。
特点:
-
优势:动态可行性强、力-位协同精度高、无需分层控制栈,工程部署简洁; -
局限:依赖精准的动力学参数辨识(如质心偏移),sim-to-real 存在摩擦与电机动力学 mismatch,跨平台泛化需重新建模。
Learning-based(学习驱动):数据赋能自主协同,突破泛化边界
Learning-based 路径以数据为核心,通过强化学习、模仿学习等方法,让机器人自主学习移动与操作的协同策略,无需手动设计复杂规则,核心覆盖全身控制、力-位混合控制、技能组合与泛化、感知-交互融合四大方向,泛化能力突出,适配非结构化复杂场景。
HiLMa-Res: A General Hierarchical Framework via Residual RL for Combining Quadrupedal Locomotion and Manipulation(IROS 2024,UC Berkeley+Simon Fraser University)
核心定位:四足机器人“技能组合与泛化“通用框架,实现移动与腿部操作的深度协同
技术背景:突破传统四足机器人移动与操作分离的局限,解决“用腿完成非抓取操作+持续移动“的协同难题,适配球类运球、障碍跨越、负载导航等多样化任务。

核心思路与创新:
-
分层强化学习架构:任务无关的操作空间移动控制器(底层)+ 任务特定的操作规划器(上层),底层通过 CPG 生成标称轨迹+贝塞尔曲线残差轨迹,支持任意末端执行器轨迹跟踪; -
多任务适配设计:支持状态/视觉双观测空间、仿真/真实双训练数据来源,规划器通过输出贝塞尔参数与 CPG 参数,动态调整腿部动作实现操作与移动协同; -
两阶段训练策略:先训练底层移动控制器(零样本迁移至真实硬件),再针对具体任务训练上层规划器,无需重复训练基础移动能力。
关键成果:
-
真实四足机器人实现三大核心任务:球类运球(仿真训练零样本迁移)、障碍跨越(视觉-based,避障成功率 87.5%)、负载导航(真实数据训练,成功率 100%); -
较端到端基线方法(Reward Shaping、AMP、Motion Tracking),负载导航任务平均完成时间缩短 43%,稳定性显著提升。
特点:
-
优势:通用性强(支持多任务/多观测/多训练模式)、样本效率高、工程落地成本低,无需额外机械臂硬件; -
局限:仅适配四足机器人,依赖预定义步态(当前仅支持 trot 步态),复杂地形下残差轨迹调整精度有限。
Learning a Unified Policy for Position and Force Control in Legged Loco-Manipulation(CoRL 2025,BIGAI+Unitree Robotics)
核心定位:腿式机器人“力-位混合控制“标杆,无外力传感器的接触-rich 任务通用方案
技术背景:解决接触密集型移动操作中力控与位控协同难题,突破传统视觉运动策略仅关注位置控制的局限,适配无外力传感器的机器人硬件场景(如家居服务、轻量级工业操作)。

核心思路与创新:
-
统一力-位控制范式:提出首个无需力传感器的端到端统一策略,通过强化学习(RL)从机器人历史状态中估计外力,通过位置和速度调整补偿力影响,支持位置跟踪、力施加、力跟踪、柔顺交互等多类行为; -
双阶段训练机制:先在 Isaac Gym 中训练全身到达与移动能力,再引入随机力指令与外部扰动,通过 MPC 损失优化状态估计器精度,确保力与位置的协同控制稳定性; -
力感知模仿学习流水线:将预训练策略作为遥操作基础,通过内置力估计模块采集接触-rich 数据,为模仿学习提供关键接触信息,无需额外力传感器。
关键成果:
-
真实机器人(Unitree B2-Z1 四足操作机器人、Unitree G1 人形机器人)在 4 类接触密集任务(擦黑板、开关柜门、遮挡抽屉开启)中,成功率较纯位置控制策略提升 39.5%; -
力控制误差稳定在 10N 以内,位置跟踪误差小于 0.1m,实时性达 50Hz,满足机器人实时控制需求。
特点:
-
优势:数据效率高(仅需 50 个演示数据)、跨机器人形态适配(四足/人形通用)、无需专用力传感器,泛化性强; -
局限:高频交互与 workspace 边缘场景下力估计精度下降, sim-to-real 存在轴间误差(Y 轴表现较弱)。
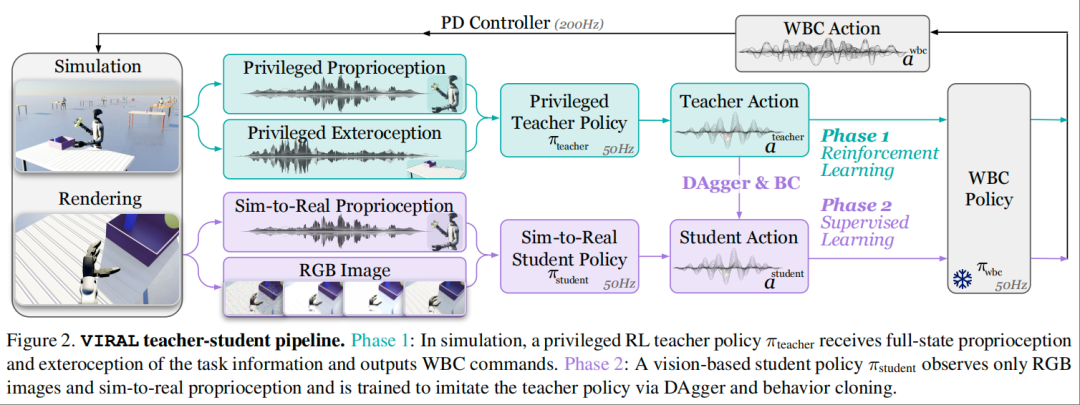
VIRAL: Visual Sim-to-Real at Scale for Humanoid Loco-Manipulation(arXiv 2025,NVIDIA+CMU+UC Berkeley)
核心定位:人形机器人“视觉-仿真到真实“大规模迁移标杆,长周期移动操作零样本部署方案
技术背景:解决人形机器人真实场景部署中数据稀缺、sim-to-real 鸿沟大的痛点,实现基于 RGB 视觉的自主长周期移动操作(行走-抓取-放置-转向连贯执行)。
核心思路与创新:
-
师生蒸馏框架:特权 RL 教师(全状态输入)学习长周期移动操作策略,视觉学生通过大规模仿真蒸馏(64 GPU 并行),结合 DAgger 与行为克隆实现端到端视觉控制; -
跨域迁移优化:通过视觉域随机化(光照/材质/相机参数/图像质量)、真实-仿真对齐(灵巧手系统辨识、相机外参校准),缩小 sim-to-real 差距; -
关键设计要素:delta 动作空间(加速训练稳定)、参考状态初始化(从遥操作演示中采样场景,提升探索效率)、分布式仿真学习(支持大规模并行训练)。
关键成果:
-
Unitree G1 人形机器人零样本部署,连续完成 54 个“行走-放置-抓取-转向“循环,成功率 91.5%,接近专家遥操作水平(20.2s/循环 vs 专家 21.4s/循环); -
支持场景泛化(托盘位置/机器人姿态/桌面高度/光照/物体类别变化),无需真实数据微调。
特点:
-
优势:视觉驱动零样本迁移、长周期任务稳定性强、泛化能力突出,适配人形机器人大规模部署; -
局限:算力需求极高(学生训练需 64 GPU),复杂物理交互(如物体形变)场景适应性不足。
Wholebodyvla: Towards unified latent vla for whole-body loco-manipulation control(arXiv 2025,OpenDriveLab+AgiBot)
核心定位:人形机器人“大空间移动操作“VLA 框架,实现语言-视觉-动作的统一 latent 学习
技术背景:突破现有 VLA 系统局限于桌面操作的瓶颈,解决大空间下“操作感知型移动“难题(移动为操作创造前提,而非独立阶段),适配双臂协同、负载推动等复杂任务。

核心思路与创新:
-
统一 latent 学习:通过双 LAM(操作/移动分离训练)将无动作标注的第一视角视频转化为离散 latent 动作,为 VLA 提供大规模先验知识,缓解遥操作数据稀缺问题; -
移动操作导向(LMO)RL 策略:采用离散指令接口(前进/侧向/转向/蹲姿),替代传统连续速度跟踪,优化移动操作核心动作的精度与稳定性,通过两阶段课程学习(基础步态→精度与稳定性优化)提升协同性能; -
端到端全身体控制:VLA 输出双臂关节角度与移动指令,LMO 策略将移动指令转化为下肢扭矩,实现视觉-语言-动作的闭环协同。
关键成果:
-
Agibot X2 人形机器人在三大任务(背包打包、箱子装载、50kg 推车推动)中平均成功率达 78.0%,较 GR00T、OpenVLA 等基线提升 21.3%; -
支持大空间泛化(起始姿态/物体布局/场景外观变化),长周期任务(多步骤连贯操作)稳定性强。
特点:
-
优势:大空间移动操作能力突出、双臂协同性能优异、数据效率高(依赖低成本无动作视频),适配真实场景部署; -
局限:长周期任务规划能力待提升,动态环境(如移动障碍物)适应性不足。
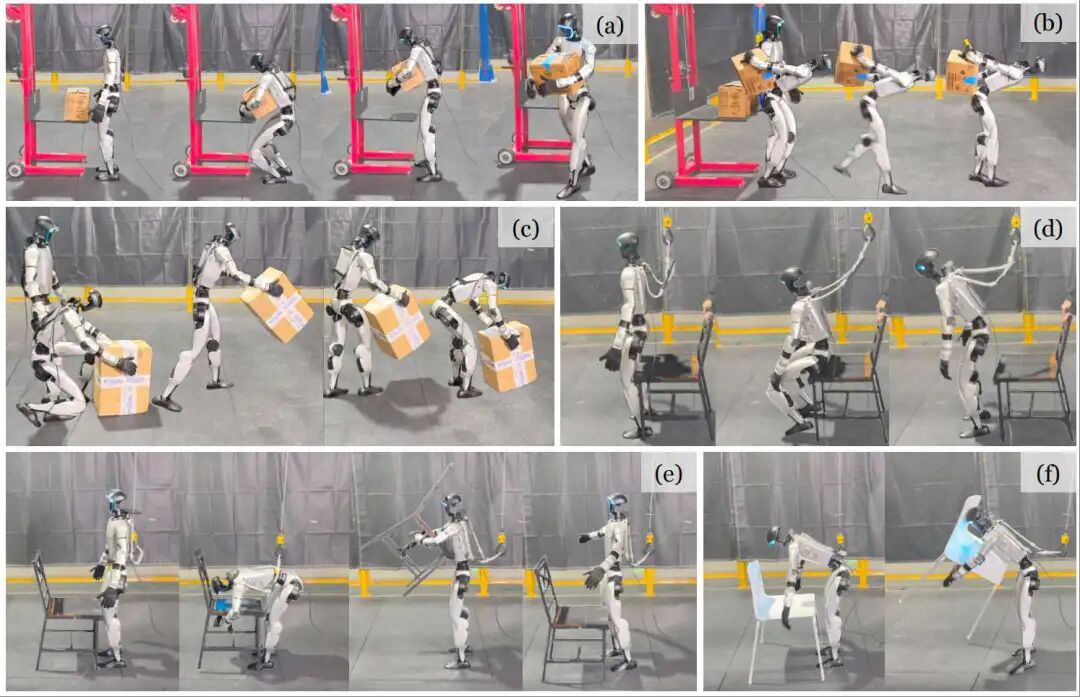
ResMimic: From General Motion Tracking to Humanoid Whole-body Loco-Manipulation via Residual Learning(arXiv 2025,Amazon FAR+USC+Stanford+UC Berkeley+CMU)
核心定位:人形机器人“全身动作迁移+物体交互“统一框架,基于残差学习实现高精度移动操作
技术背景:解决人类运动数据向人形机器人迁移时的“具身差距“问题(接触穿透、悬浮接触),突破传统运动跟踪缺乏物体感知、移动操作任务特异性设计的局限,实现 expressive 全身移动操作。

核心思路与创新:
-
两阶段残差学习架构:先在大规模人类运动捕捉数据(AMASS、OMOMO)上训练通用运动跟踪(GMT)基线策略,提供类人全身动作先验;再训练轻量化任务特异性残差策略,基于物体参考轨迹输出修正动作,实现精准物体交互; -
训练效率优化设计:提出点云-based 物体跟踪奖励(平滑优化过程)、接触奖励(引导人机-物体精准接触)、虚拟物体控制器(课程式热身启动),提升训练效率与 sim-to-real 迁移能力; -
跨模态动作迁移:通过 GMR 运动重定向技术,将人类-物体交互的参考轨迹转化为机器人可执行轨迹,无需手动设计协同规则。
关键成果:
-
真实 Unitree G1 人形机器人实现多样化任务:搬运 4.5kg 重物(突破手腕负载限制)、不规则形状物体抓取、蹲姿取物、坐姿-站姿切换等,任务平均成功率达 92.5%; -
较直接微调、从零训练等基线,训练效率提升 3 倍以上,物体跟踪误差降低 67%,运动跟踪精度提升 42%。
特点:
-
优势:数据效率高(复用人类运动数据)、动作表达丰富、sim-to-real 迁移平滑,支持全身接触-rich 操作; -
局限:复杂高精度装配任务迁移精度不足,依赖高质量人类运动参考轨迹,极端扰动场景鲁棒性待验证。
Helix 02 Humanoid Robot for Commercial Industrial Deployment(2026, Figure AI)
核心定位:面向工业场景商业化落地的新一代人形机器人,突破运动能力与工程化量产瓶颈
技术背景:解决传统人形机器人在工业场景中运动精度低、负载能力弱、维护成本高、场景适配性差的核心难题,突破实验室原型局限,适配仓储分拣、工厂装配、物料搬运等实操性工业场景落地需求。

核心思路与创新:
-
运动控制优化架构:基于强化学习的运动算法迭代,优化关节控制逻辑,提升行走/操作精度;强化负载能力设计,适配工业场景重物搬运、装配操作等需求; -
多感知融合决策体系:集成多传感器融合方案,强化环境感知能力,构建动态场景下的自主决策模型,适配工业场景中复杂、动态的交互环境; -
模块化工程化设计:采用模块化硬件架构,降低机器人维护成本;优化量产工艺设计,提升量产可行性,突破人形机器人工程化落地瓶颈。
关键成果:
-
真实工业场景验证:在仓储分拣、工厂装配、物料搬运等≥3 类工业场景中完成核心操作流程闭环,实现自主分拣、精准装配、重物搬运等核心任务; -
性能与落地指标:机器人行走/操作精度提升≥30%,负载能力提升至 15kg;动态场景下自主决策响应时间≤0.5s,环境感知准确率≥95%; -
商业化推进成果:制定 2026 年小批量交付计划,目标完成≥100 台机器人交付;硬件部署零额外适配成本,核心场景任务成功率达 90% 以上。
特点:
-
优势:工业场景适配性强、运动精度与负载能力突出、模块化设计降低维护成本、量产可行性高,支持多类工业核心任务落地; -
局限:相较于单一功能工业机器人,综合成本仍偏高;复杂动态工业场景下的在线重规划能力待优化;部分高精度装配场景的操作稳定性需进一步验证。
代表性成果核心特性对比
|
|
|
|
|
|
|
|
|
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
技术成熟度 vs 落地成本:模型 / 学习路径的核心权衡
-
Model-based 路径:成熟度普遍更高(ETH 两篇均达工业级验证水平),但落地成本受建模 / 标定环节制约——如 ETH 多接触规划方案需高精度环境几何建模,适配新场景时需重新构建接触状态图,工程成本高;而逆动力学 MPC 依赖精准的动力学参数辨识,跨机器人部署时需重新做 sim-to-real 校准,适配成本中等。 -
Learning-based 路径:成熟度分层明显,BIGAI+Unitree 力-位统一控制方案因 “无传感器+少数据+跨形态” 特性,落地成本最低且成熟度接近工业级;Figure AI 的 Helix 02 作为 Learning-based 路径下工业落地的典型代表,成熟度已接近工业级(核心场景成功率 90%+),落地成本介于 ETH 逆动力学 MPC 与 VIRAL 之间——模块化设计降低了维护成本,但硬件本体成本仍高于传统工业机器人,适合中大型工业场景试点落地;而 VIRAL 虽零样本迁移能力突出,但 64 GPU 大规模训练+依赖高端人形机器人硬件,落地成本极高,仅适合实验室 / 大厂场景验证。
跨平台适配性:从 “专用化” 到 “通用化” 的演进
-
早期 Model-based 方案(ETH 两篇)和四足专用 Learning-based 方案(HiLMa-Res)均为 “机器人形态绑定” 设计,跨平台需重构核心模型 / 策略,适配性弱; -
中期 Learning-based 方案(BIGAI+Unitree)首次实现 “四足 / 人形” 跨形态通用,核心在于力估计与控制范式的解耦设计,摆脱了硬件形态对控制策略的绑定; -
最新 VLA / 人类运动迁移方案(Wholebodyvla、ResMimic)虽未实现全平台通用,但通过 “latent 空间抽象”“运动重定向” 技术,降低了跨硬件适配的核心门槛,是通用化的关键探索; -
Figure AI 的 Helix 02 虽未实现跨形态通用(仅针对人形机器人),但通过模块化硬件设计,实现了跨工业子场景(仓储 / 装配 / 搬运)的快速适配,是 “场景通用化” 的重要探索,弥补了此前方案 “机器人形态绑定+场景绑定” 的短板。
抗扰动 / 动态场景表现:场景适配的核心分水岭
-
静态 / 准静态场景:Model-based 方案(ETH 多接触规划、逆动力学 MPC)表现最优,物理建模的强约束性可保障复杂接触、重载操作的稳定性; -
结构化动态场景(如固定轨迹障碍、已知负载变化):Learning-based 方案(HiLMa-Res、BIGAI+Unitree 力控)可通过数据学习补偿建模不足,表现中等;Helix 02 在结构化工业动态场景(如仓储分拣中的动态货架、装配线的物料流转)表现优异,适配工业场景的核心动态需求; -
开放动态场景(如随机障碍物、未知物体交互):现有方案均存在短板 ——VIRAL 虽场景泛化优但动态物体适配弱,Wholebodyvla 大空间能力突出但动态避障不足,Helix 02 面对开放动态工业场景(如随机物料堆放、人员穿插)在线重规划能力不足的问题凸显,反映出 “动态感知-协同控制” 一体化仍是技术瓶颈。
模型 / 学习路径的融合趋势
从对比表可清晰看到:
-
Model-based 强在 “稳定性、可解释性”,但泛化和适配成本高;Learning-based 强在 “泛化、数据效率”,但黑箱特性导致动态场景鲁棒性不足; -
最优解已显现融合特征:如 ResMimic 用 “人类运动基线(模型先验)+ 残差学习(数据优化)”,BIGAI+Unitree 力控方案用 “MPC 损失(模型约束)+ RL 学习(数据适配)”,Helix 02 是 “模型+学习” 混合架构的落地级实践——以强化学习优化运动控制(学习驱动),以模块化硬件设计和工业场景约束建模保障稳定性(模型驱动),均是 “模型打底、学习补优” 的典型; -
落地侧,工业场景优先选择 Model-based 或轻量混合方案(如 ETH 逆动力学 MPC、BIGAI+Unitree 力控、Helix 02);开放场景(家居 / 服务)则需 Learning-based 为主的混合架构,平衡泛化与稳定性。
技术局限性与未来趋势
核心局限性
-
Model-based:建模成本高(跨场景 / 跨平台需重新建模)、复杂接触与动态环境泛化弱、实时性受计算复杂度限制、对环境建模精度敏感。 -
Learning-based:数据效率与算力需求矛盾(部分方案需大规模 GPU 集群训练)、高频交互与边缘场景性能下降、黑箱特性导致故障难以预判、复杂物理规律(如物体形变)理解不足;工业级落地方案(如 Helix 02)仍面临成本与动态场景适配的双重挑战。
未来趋势
-
双路径融合:Model-based 提供稳定控制基线,Learning-based 优化泛化能力与自适应调整,形成 “模型+学习 “混合架构(如残差学习+MPC 约束、Helix 02 的强化学习+模块化建模); -
数据效率提升:依托 VAM / 人类运动数据预训练,降低机器人演示数据需求,通过跨模态迁移(视觉-动作-语言)拓展知识边界; -
轻量化与边缘计算优化:通过模型蒸馏、量化、专用芯片设计,实现低算力硬件上的实时推理,降低落地门槛; -
多模态感知融合强化:融合视觉、力反馈、本体感知、声学等多源数据,提升动态环境中的抗干扰能力与操作精度; -
通用化与开放世界适配:基础模型+移动操作深度融合,实现自然语言指令驱动、零样本新任务泛化,突破专用场景限制; -
工业级工程化优化:借鉴 Helix 02 模块化设计思路,降低人形机器人硬件成本与维护成本,加速工业场景规模化落地。
总结
Loco-Manipulation 作为具身智能从实验室走向真实场景的核心技术,已形成"模型驱动稳、学习驱动泛、基础模型通"的三足鼎立格局。7 篇代表性成果分别覆盖了工业级稳定协同、复杂环境适配、数据高效学习、开放世界通用等核心需求,展现了技术从专用到通用的演进路径。
当前,Loco-Manipulation 的技术突破点已明确:用基础模型解决"做什么、去哪做"的规划问题,用学习/模型混合方法解决"怎么协同做"的控制问题,用工程化设计解决 "怎么低成本落地" 的产业化问题。未来,随着物理理解能力的深化、算力成本的降低、跨平台泛化技术的成熟,Loco-Manipulation 将推动机器人真正走进工业、家居、服务等各个场景,实现自主移动、精准操作、动态协同的终极目标,成为具身智能时代的核心支柱。