作者|Moonshot
对于扫地机器人来说,一道门槛往往比一张复杂的客厅地图更难。
导航算法可以识别家具轮廓、绕开拖鞋和数据线,但只要地面出现几厘米的高度差,机器往往就只能在原地反复试探,最后选择绕路。于是很多家庭的清洁地图里,总会有几个被标记出来的「禁区」。
AWE 2026 的石头展台上,这个常见的困境被重新摆在了机器面前:一段 4.5 厘米的门槛,再加上一条 4.3 厘米的台阶。
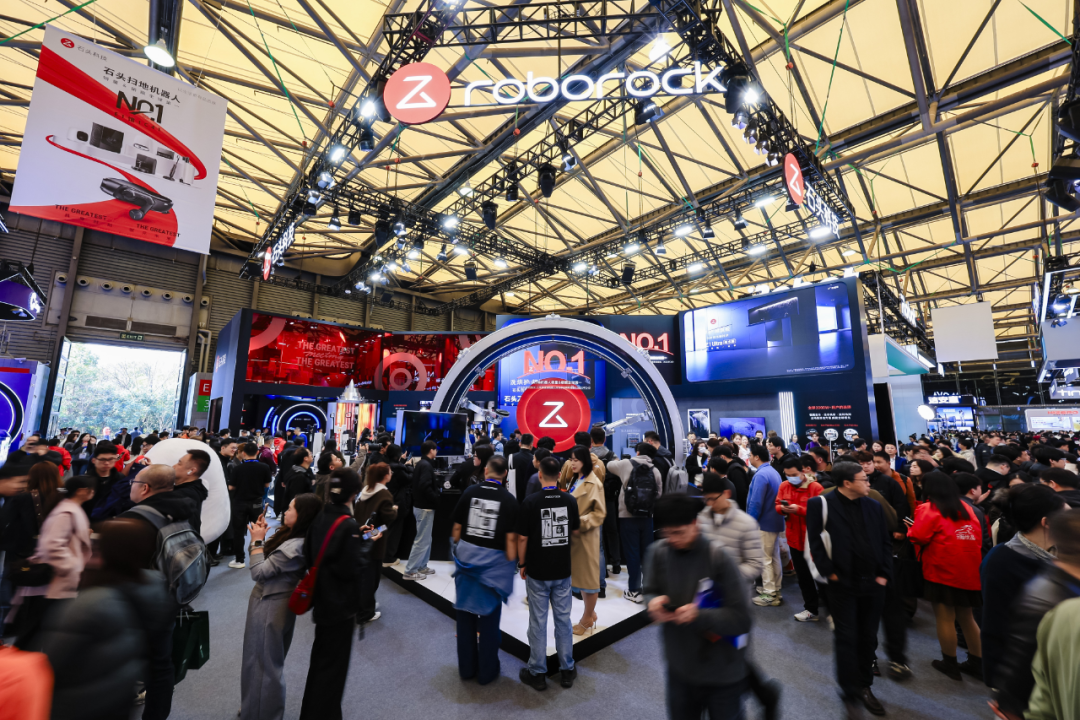
石头 G30S Pro 在障碍前短暂停顿。随后机身前端抬起,仿生关节伸缩摆动,驱动轮同步升起,整机像一辆越野车一样调整姿态,极具机械美感地、平稳地翻越了障碍。
这就是石头新一代全能旗舰扫地机器人 G30S Pro 在 AWE 2026 现场的实机演示。

纵观扫地机器人发展的十年,行业的技术演进几乎一直被困在「二维平面」里。厂商们内卷吸力参数与算法避障,机器人也越来越聪明,但只要遇到几厘米的高门槛、低矮的沙发底,机器依然会停在边界之外,这些问题仍然是困扰用户的最原始痛点。
与此同时,行业数据也在发生变化。当前 5000 元以上高端扫地机市场增速已经高达 65%。这意味着消费者的核心关注点,正在从单纯的「性能参数」,转向对真实家庭场景中的清洁体验。
作为 2025 年扫地机器人销量与销额全球双第一的品牌,石头科技在 AWE 展出的 G30S Pro,实质上是对这一行业痛点的回应。
这台产品试图打破扫地机器人长期以来的「平面滑行」逻辑,让机器开始具备真正的三维空间运动能力,从而面对更复杂的家庭物理地形。

它搭载的底盘升降 3.0 AI 轮足系统,让扫地机第一次开始具备类似「姿态控制」的能力。它不再是被动适应平面环境的清扫工具,而是能够根据前方环境开始主动感知、判断、处理三维空间中复杂的物理障碍。
从行业技术路径来看,这可能是扫地机器人行业十年来最重要的一次底盘结构进化。
01
从拖布抬升到姿态控制:
底盘技术的三次跃迁
要理解 G30S Pro 的变化,先要理解一个长期困扰扫地机器人的问题:它们在家庭里行动的方式,其实一直很受限。
过去十年,扫地机器人的进化主要集中在吸力、导航和避障算法上。但在底盘结构这个最基础的层面,行业很长时间里都停留在一种「被动适应」的逻辑:机器依靠固定高度的底盘在地面移动,一旦遇到门槛、滑轨或厚地毯,就只能靠动力硬冲或者绕开。在早期的底盘 1.0 时代,大多数扫地机器人的越障能力大约停留在 2cm 左右。这意味着许多中国家庭常见的推拉门滑轨、浴室隔水条,都会成为清洁路径上的「天然边界」。
石头在这一阶段推出了 底盘升降 1.0 方案,让机器在需要时抬高底盘,将越障能力提升到约 4cm。这是第一次突破了扫地机器人长期以来的高度限制。
次年,石头将这一方案升级为底盘升降 2.0,底盘开始支持动态调节高度,升级为「无极动态升降」。机器可以根据地面的具体情况实时调节清洁高度,拖布模块则会同步上抬至安全高度,能完美兼容 3cm 的中长毛地毯,避免湿拖布触碰。
但随着扫地机器人在家庭中的进一步普及,用户对清洁覆盖率的要求也在不断提高,复杂地形的越障能力再次成为关注的重点,仅靠单一方向的高度抬升,已经很难继续提升家庭复杂环境的通过能力。
G30S Pro 的出现,正是石头在这一技术路径上的第三次结构升级。在底盘升降 3.0 AI 轮足系统中,石头重新设计了整套底盘结构,引入全新的 AI 轮足系统,在底盘结构中引入了仿生关节与 360°摆臂结构,让驱动轮、万向轮以及底盘高度都可以独立动作,扫地机开始像一个小型机器人一样,可以通过调整身体姿态跨越障碍。
这让扫地机器人第一次拥有了「运动能力」。
如果说 1.0 和 2.0 时代的底盘升降,本质上仍然是在「遇到障碍时抬高一点」——通过增加高度来换取通过能力,那么到了 3.0 时代,机器的行动方式开始发生变化。
在 AI 轮足系统的支持下,扫地机器人能够识别环境、判断通行策略,并通过调整整体姿态完成越障动作。门槛、滑轨、地毯这些过去只能依靠动力硬冲的障碍,开始被当作可以被处理的「地形」。
这让扫地机器人第一次具备了接近移动机器人的运动逻辑:感知环境、判断路径,然后执行对应的动作。但当扫地机器人真正开始尝试处理复杂地形时,行业也不得不面对一个长期存在的工程矛盾——越障能力需要结构空间,而结构空间往往意味着更高的机身。

与此同时,家庭中大量清洁场景——床底、沙发底、电视柜下方——又要求扫地机器人尽可能轻薄。于是,一个看似简单的问题变得困难起来:机器既要能跨越门槛,又要能钻进低矮家具。
过去几年里,很多市面上主打能钻床底的「超薄」机型,往往只能以牺牲核心导航能力为代价。这种结构上的互相制约,让消费者长期只能在「越障能力」与「低矮通过性」之间做选择。直到石头 G30S Pro 的出现,这个困扰行业多年的硬件矛盾,终于开始出现新的工程解法。
02
一台机器同时破解两道难题:
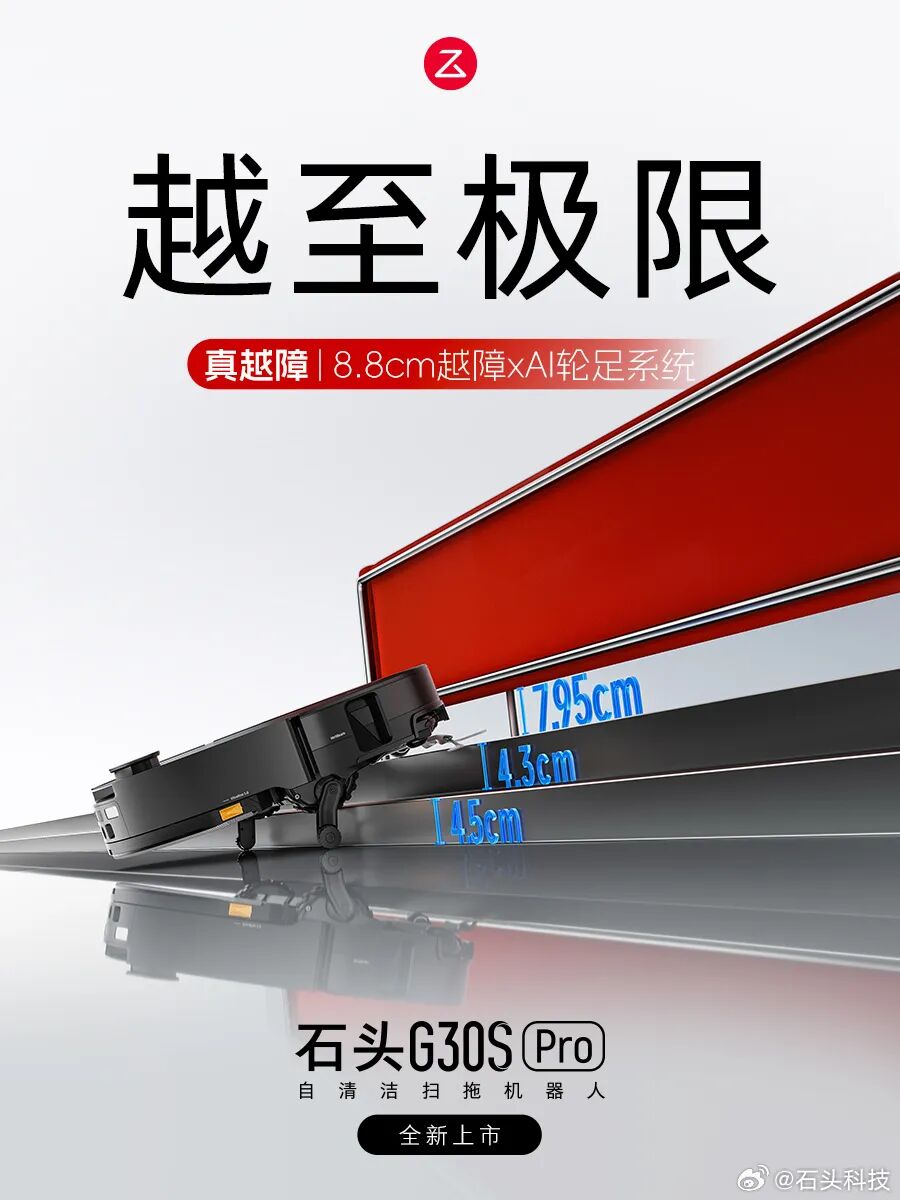
8.8cm 越障 + 7.95cm 穿越
如果说底盘升降 1.0 和 2.0 仍然是在「抬高一点」的逻辑上做优化,那么到了 3.0 时代,扫地机器人的越障方式开始发生变化。
G30S Pro 给出的答案,是一套更接近移动机器人的姿态控制系统。
「过不去」的问题怎么解决?靠越障的重构。
当机器面对门槛、滑轨或地毯等复杂障碍时,它不会再依靠动力硬冲。首先是「眼睛」的介入,先通过 RGB 摄像头与三线结构光识别前方障碍物的高度、距离与形态。
随后,底盘升降 3.0 AI 轮足系统启动介入。得益于整套底盘架构的彻底重构,系统引入了仿生关节和自适应机械臂辅助的 360°摆臂。机器开始模拟人类关节的伸缩和摆动,执行能抬、能探、能退的战术动作。
最终,这套结构带来了 最高 8.8cm(4.5cm + 4.3cm)的双层越障能力。对于中国家庭中常见的门槛、推拉门滑轨以及浴室隔水条来说,这几乎覆盖了绝大多数真实场景。

在地毯场景下,系统也会同步调整高度,它的驱动轮与底盘最高可抬升约 20mm,拖布离地 8mm,在物理层面避免了地毯被打湿与二次污染。
机器还会在 App 中自动记录门槛位置,在后续清扫时直接规划更优路径,换句话说,越障不再只是一次临时动作,而逐渐变成一种可以被学习和复用的能力。
这种将单次越障转化为系统经验的设计,印证了石头始终以消费者的真实场景为锚点,而非将技术参数作为终点的产品逻辑。
「进不了」的问题怎么解决?靠穿越的破局。
越障打通了垂直空间的高度差,但当扫地机器人开始具备更强的越障能力时,另一个长期存在的问题也随之浮现:如果机器越来越擅长「跨过去」,它还能否继续「钻进去」?
从用户体验来看,沙发底、床底往往是灰尘最容易堆积的地方。而传统扫地机在这里深陷两难困境,如果为了降低机身高度而削弱导航系统,清扫效率就会明显下降;而如果保留完整的导航模块,机身又很难足够低。
问题的关键在于顶置 LDS 激光雷达。这个结构虽然能提供稳定的导航能力,但同时也锁定了机身高度,使得很多产品的高度长期停留在 9.5–11cm 区间。
所以过去市面上的「超薄扫地机」,本质上是牺牲导航能力换取空间的畸形产物,低矮空间依然等于盲扫区。
石头 G30S Pro 则换了一种思路。

它采用后置升降 LDS 结构设计,当机器人需要进入低矮空间时,LDS 模组下降收纳,从而降低整机高度,最终实现最低 7.95cm 的通过高度。与此同时,石头的系统仍保持 110°后窗视角来维持定位能力,使得机器人在低矮空间中依然可以保持稳定导航。
从技术逻辑看,这个设计解决了一个「零和博弈」的问题,让导航精度与空间通过性不再是必须取舍关系。过去被割裂的「越障能力」与「低矮穿越能力」,也终于在一台机器上实现了完美的统一。
03
G30S Pro 的闭环清洁力:
过得去坎坷、扫得净角落
在扫地机器人的评价体系中,强大的通过性只是完成了「到达」,到达之后的清洁力与智能化,才是对用户真正有价值的闭环。
如果说底盘升降 3.0 让扫地机器人拥有了更强的「行动能力」,那么 G30S Pro 的清洁系统则负责把这种行动能力转化为真正有效的清洁结果。
首先是边角清洁。传统扫地机器人很难完全覆盖墙角,因为圆形机身天然存在清扫盲区。而 G30S Pro 搭载的双机械臂边刷的设计,使得扫地机器人能够实现 100% 的墙角覆盖,同时动态机械臂边拖更是做到了极限贴边 <1mm。

在核心清扫能力上,G30S Pro 拥有高达 35000Pa 的飓风瞬吸,较上一代提升了 38%,搭配石头首创的 DuoDivide 双悬臂对刷系统,内部智能差速齿轮箱以 10% 的转速差将毛发撕裂成束,通过「卷-聚-剥-吸」的物理原理,从源头实现 0 缠绕。这种结构性解决方案远比简单提升吸力更重要。
拖地部分同样迎来了结构级升级,四区双震拖布提供 14N 的下压力和每分钟 4000 次的高频震动,震动结构类似声波牙刷,通过高频振动瓦解顽固污渍。配合基站提供的 100℃ 动态热水洗布功能,热水可以加快油污溶解速度,使拖地效率明显提升。

当运动能力、清洁能力都提升之后,G30S Pro 更进一步,还提升了扫地机的「理解能力」与判断执行能力。
真正让这套具身能力实现完美闭环的,是其强大的智能化「大脑」。
G30S Pro 内置的 RRmind GPT 大模型,能够理解复杂的自然语言指令并自主决策。
G30S Pro 的感知系统由 RGB 摄像头、三线结构光以及 Reactive AI 避障系统构成,可以识别超过 280 种常见障碍物。这些信息不仅用于避障,还会直接影响清洁策略。
例如,当系统识别到咖啡粉等干性颗粒时,会优先采用高吸力清扫;而面对酱料类污渍,则会调整拖地策略并控制水量,避免污渍扩散。从环境感知、策略判断,到姿态调整和实际清洁,至此,一条完整的感知-决策-执行链路在 G30S Pro 身上得以闭环。
也正是在这个过程中,它逐渐从一台执行固定程序的清洁设备,变成能够根据环境动态调整行为的家庭机器人。
04
扫地机器人正在经历一次「维度升级」
将视角从单一产品拉回整个行业,可以看到扫地机器人赛道的竞争维度正在发生变化。
竞争的阵地,已经从「参数军备竞赛」全面转向「空间通过性 + 综合能力体系」的比拼,从纸上谈兵,走进杂乱无章的真实家居场景。
作为连续十个季度稳居全球第一的品牌,石头科技展示的技术路线清晰印证了这一趋势。从 2025 年率先量产五轴折叠仿生机械臂的 G30 Space 探索版,到 CES 2026 全球首发、此次 AWE 国内首秀的 G-Rover 概念机,再到量产旗舰 G30S Pro 和国民级体验全能扫地机 P20 Max,底盘能力正在成为清洁机器人的新核心竞争力之一。

让我们再次回到 AWE 2026 的石头展台。
我们常常习惯用某一项参数的刷新来定义行业进步——更高的吸力、更多的传感器、更快的算法。但当一台扫地机器人开始抬起轮足跨越高门槛、收缩导航模组穿越低矮床底,还能听懂复杂的自然语言指令、精准识别 280 多种障碍物并自主决策清洁策略时,它所展示的已经不是某个单点的进步,而是一套感知-决策-执行深度融合的系统能力。

这也是扫地机器人行业正在发生的一次变化:竞争不再只发生在算法与参数层面,而开始深入到机器本身的物理能力与系统能力。
从某种意义上说,G30S Pro 所代表的,不只是一次产品升级,而是扫地机器人能力边界的一次扩展——机器真正开始适应真实家庭的复杂空间。
门槛、滑轨、地毯、沙发底,这些看似琐碎的家庭细节,其实构成了机器进入现实世界的真正门槛。当扫地机器人能够跨过去、钻进去,并在复杂环境中自主完成清洁任务时,它也正在逐渐从一台执行固定程序的清洁设备,演变为能够理解环境并主动行动的家庭机器人。
而这或许正是智能家电进化的方向。
不是让人去适应机器的运行边界,而是让机器去适应真实生活的复杂性。当这种变化发生时,技术不再只是参数表上的进步,而开始真正改变人与家之间的关系。