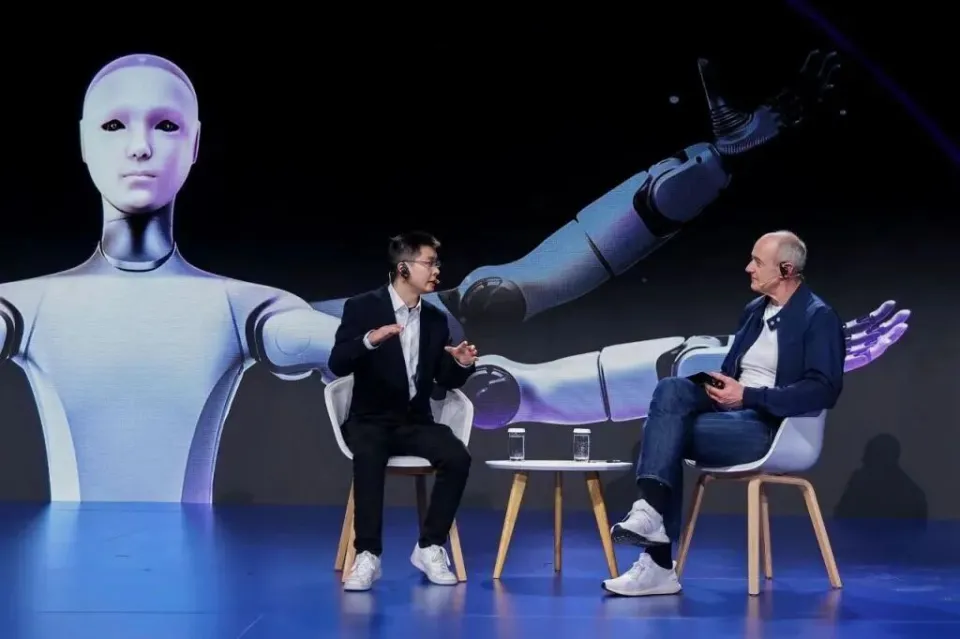
【科技纵览】“当前最值得推进且见效较快的方向,是优化机器人的动作能力。预计在未来六个月左右,我们将实现机器人任意动作的自主生成。”在近日于北京举行的西门子RXD大会上,宇树科技创始人、董事长兼首席执行官王兴兴与西门子全球CEO博乐仁(Roland Busch)展开对谈时作出上述表示。
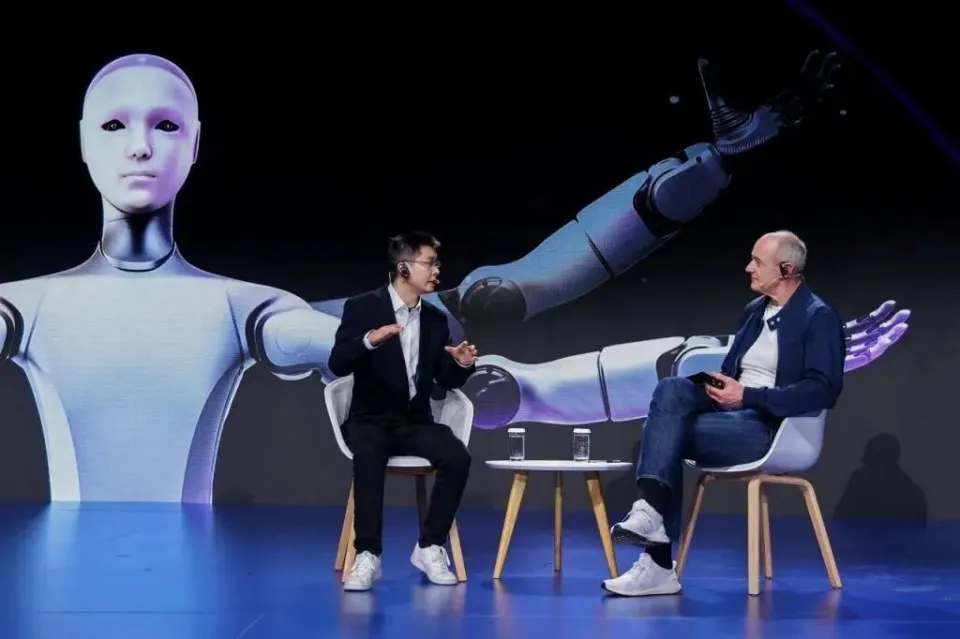
王兴兴指出,现阶段宇树机器人在格斗比赛中所展现的动作仍显机械、固定,所有招式均依赖预先采集的数据。“例如我们事先录制了二十多个动作,对战时仅通过这些动作进行组合出招,但每次出拳方式完全一致,既缺乏挑战性,也削弱了观赏性。”他解释道。
为提升表现力,团队正采集数百个基础动作用于AI训练。训练完成后,机器人将能自由、流畅地组合出拳、变向及上下左右闪避等连贯动作,显著增强灵活性。“届时,每天的对战招式都将不同,两台机器人交手时的动作丰富度和观赏性将大幅提升。”王兴兴强调,动作多样性直接反映智能化水平——若仅能执行几个固定动作,智能程度有限;而若可完成成千上万种动作并自主决策组合,则标志着真正高阶智能的实现。
他进一步表示,唯有具备丰富动作库,并结合大语言模型等AI技术实现系统级调用,人形机器人才能在工厂与家庭场景中真正承担实操任务。
当天活动现场展示了宇树人形机器人与西门子SIMOVE Fleet Manager智能调度平台的协同应用:通过该平台,自动导引车(AGV)与人形机器人可在工业现场实现统一调度与联动管理,重点探索路径规划、动态避障及通信协同等关键能力,勾勒出具身智能在制造业的可行落地路径。
尽管移动与基础动作问题已基本解决,王兴兴坦言,抓取、操作尤其是触觉感知仍是制约大规模商用的核心瓶颈。“针对特定物品,只要训练充分,抓取成功率可达100%;但一旦物体形态稍有变化,成功率便急剧下降。”他指出,突破此难题需海量异构物品的训练数据,而目前该环节尚未攻克。
值得注意的是,宇树的行走、跑步及功夫类动作主要依托纯仿真环境训练完成;但在实操任务如抓取或装配方面,全球仿真技术尚不成熟,仍高度依赖真人实景数据采集。然而,现实场景搭建成本高昂且难以覆盖上千种工况,成为行业共性挑战。
“我认为仿真与实景两条技术路线都应并行推进,目前尚无统一最优解。其中,触觉仿真技术尤为关键,它能更精准模拟抓取过程,是当前攻关重点。”王兴兴总结道。
西门子大中华区总裁兼首席执行官肖松向澎湃新闻表示,人形机器人执行搬运、拧螺丝等简单工厂任务或在一两年内成为现实,但要深度融入核心生产体系、承担高精度复杂作业,仍需5至10年的技术沉淀与生态协同。“这要求其性能达到工业级标准:近乎100%的成功率、远超现有水平的精度与效率,以及绝对的安全可靠性,同时能适应多样化工业场景,而非仅解决预设问题——这一切都依赖训练数据、仿真环境及整个产业生态的同步成熟。”