一、MEMS IMU的集成与系统设计
MEMS IMU的集成与系统设计


SST公司的STIM318

封装分级
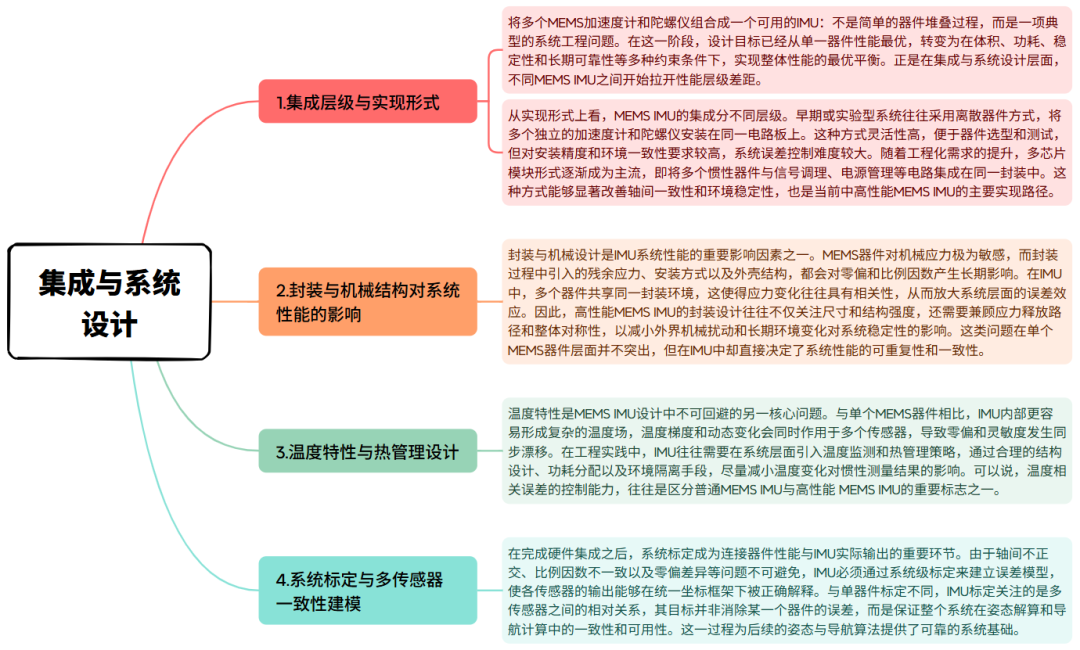
MEMS IMU的集成方式、封装策略、温度管理和系统标定方法,共同决定了其最终能够达到的性能等级。即使采用性能相近的MEMS惯性器件,不同的系统设计思路和工程实现细节,也可能导致IMU在稳定性、可靠性和长期性能上的显著差异。
二、MEMS器件集成到IMU后的系统问题
在单个MEMS加速度计或陀螺仪的讨论中,器件往往被假定为理想地安装在某一坐标轴上,其性能可以通过一组相对独立的指标来描述。然而,当这些器件被集成进IMU,成为一个多轴、同步工作的系统时,许多在器件层面并不突出的因素,会迅速演变为决定系统性能的关键问题。也正是在这一阶段,IMU的设计重点开始明显偏离“单一器件性能最优”的思路,转而关注系统层面的整体一致性与稳定性。
1.需要面对的是单器件性能指标与IMU实际性能之间的差距。在器件数据手册中给出的零偏、噪声或稳定性指标,通常是在理想测试条件下、针对单轴或单芯片得到的结果。但在IMU中,多轴器件需要同时工作,其误差不再是彼此独立的,而是通过姿态解算、坐标变换和积分过程相互耦合。即便每一个器件在单独测试时都表现良好,其组合后的系统性能也可能因为误差叠加和相关性而显著下降。这也是工程实践中“器件选型很好,但IMU指标却达不到预期”的常见原因之一。随着多轴集成,轴间一致性和几何误差问题开始变得尤为重要。在IMU中,加速度计和陀螺仪的三条敏感轴不可避免地存在安装角度偏差、灵敏度不一致以及零偏差异。这些误差在单器件使用时影响有限,但在姿态解算和惯性导航过程中,会通过坐标系耦合放大为姿态误差和导航误差。尤其是在高精度IMU中,轴间不正交和比例因数不匹配往往成为限制性能进一步提升的主要瓶颈之一,需要通过精细的系统标定和建模才能得到有效抑制。

DJI WKM飞控IMU拆解
2.封装与环境因素带来的影响,同样是IMU系统层面无法回避的问题。MEMS器件在芯片级测试中表现出的性能,并不一定能够在实际封装和整机环境中完全保持。封装应力、温度梯度以及长期环境变化,都会引入额外的零偏变化和灵敏度漂移。当多个器件被封装在同一IMU模块中时,这些影响往往具有明显的相关性,从而使系统误差呈现出更加复杂的演化特征。这也是为什么在高性能MEMS IMU中,封装设计和热管理往往与器件设计同等重要。

MEMS陀螺仪结构测试
3.从误差传播的角度来看,MEMS器件误差在IMU中的影响方式也发生了本质变化。加速度计的误差会通过积分直接影响速度和位置估计,而陀螺仪的误差则首先表现为姿态漂移,进而影响重力补偿和坐标变换的准确性,最终导致整体导航性能快速劣化。由于这些误差是通过系统算法不断传播和放大的,其后果往往远比器件层面直观得多,这也是IMU必须进行系统级误差建模和补偿的根本原因。

惯性导航基本原理:加速度积分得到速度,速度积分得到位置

捷联惯性导航机械编排
正是在上述因素的共同作用下,MEMS IMU的性能不再是简单的器件性能叠加,而是一个高度系统化的结果。器件的一致性、封装与环境适应能力、误差相关性以及系统级建模和标定方法,共同决定了IMU能够达到的精度等级。
三、按照封装方式进行分类
从工程实现的角度来看,MEMS IMU的不同封装方式直接影响系统性能、稳定性和适用场景。根据封装深度和集成形式,MEMS IMU可以大致分为三类:离散器件式、多芯片模块式,以及单封装高度集成式。
1.离散器件式
离散器件式 MEMS IMU是最基础的封装形式,也是最早的工程实现方案。在这种方式下,各个加速度计和陀螺仪作为独立器件安装在同一电路板上,通过外部信号调理电路获取输出。封装相对简单,器件之间没有统一模块化集成,调试和替换灵活,因此在科研实验、原型验证和教学平台中仍然广泛使用。这种封装方式的主要特点是灵活性高,但系统性能有限。由于每个器件独立存在,轴间几何误差和零偏差异容易产生耦合,使姿态解算精度受限;同时,温度变化、机械应力等外界因素会对各器件产生不同影响,导致长期稳定性下降。尽管离散器件封装便于实验调试,但在工业控制、无人系统或高精度导航场景中,很难保证长期可靠性和高精度。
2.多芯片模块(MCM)式
多芯片模块(MCM)式MEMS IMU是当前中高性能惯性测量单元的主流封装形式,其特点是在同一模块中集成多个加速度计、陀螺仪以及信号调理电路和功率管理单元。通过统一的机械、热和电气设计,这种封装方式能够保证各传感器之间的相对一致性,从而显著提高系统性能和长期稳定性。相比离散器件式IMU,MCM模块在工业、无人系统和战术级应用中展现出更强的可用性和可靠性。
在系统工程层面,MCM封装的优势十分明显。模块化集成能够有效减少器件间的轴间误差,降低姿态解算中的几何误差累积,同时通过优化封装材料和结构设计,减轻机械应力和温度变化对零偏和比例因数的影响。内部温度场更加均匀,多个传感器的热漂移更容易被系统标定补偿,从而提升长期稳定性和可靠性。这种封装方式在工程实践中不仅提高了系统性能,还简化了批量生产和标准化测试的可行性,使MCM IMU成为中高性能应用的首选方案。

从工程实现看,多芯片模块设计需要兼顾布局、封装材料、电气接口和系统标定

用于热冲击试验的MEMS IMU

降低MEMS IMU热冲击的隔离器设计及安装方法
在实际应用中,MCM封装的MEMS IMU广泛出现在工业自动化、机器人、无人机以及战术级导航系统中。典型产品包括:ADI ADIS16488和ADIS16497系列,这些模块化IMU在工业和无人系统中应用广泛;Honeywell HG4930系列则针对战术级应用,采用多芯片集成和温度补偿机制;ST iNEMO和LSM6系列工业模块则用于机器人与自动化场景,支持系统级标定和姿态输出接口。通过模块化封装,这些IMU能够在保证性能稳定性的同时兼顾可生产性和工程可靠性。
需要注意的是,MCM封装本身并不直接保证高精度,而是为实现高精度提供了可控的系统基础。器件选择、封装设计和系统标定共同作用,决定了模块最终的精度和稳定性。相比离散器件式,MCM封装在轴间一致性、环境适应性和长期稳定性方面有明显优势,这也是其成为中高性能MEMS IMU工程主流的关键原因。
3.单封装/高度集成式IMU(SiP / SoC)
单封装或高度集成式MEMS IMU是近年来随着消费电子、小型无人机和可穿戴设备发展而兴起的一类封装形式。与多芯片模块式相比,这种IMU将加速度计、陀螺仪、信号调理电路、温度传感器甚至一些控制和处理电路集成在同一芯片或封装中,实现了极高的体积和功耗优化。单封装形式的优势在于尺寸小、重量轻,并且模块内部传感器之间的布局一致性高,有利于批量生产和工程标准化。


传统式与高度集成式对比
从系统工程角度来看,高度集成封装虽然在空间和功耗上有显著优势,但也带来了一些新的挑战:1.由于所有器件紧密集成,内部热耦合增强,温度变化可能同时影响加速度计和陀螺仪的零偏与灵敏度,需要通过热设计和系统标定进行补偿。2.封装应力更难释放,尤其是在焊接或封装过程中产生的残余应力,会对传感器的零偏稳定性产生长期影响。3.高度集成的电路设计必须充分考虑传感器间的电磁干扰和功率管理,以确保整体性能的一致性和可靠性。
在应用层面,这类IMU广泛应用于手机、可穿戴设备、消费级无人机以及便携式稳定平台等场景。典型产品包括ST的LSM6系列、InvenSense的MPU系列、Bosch Sensortec的BMI系列等,它们都以单封装形式实现了小型化设计,同时提供系统级标定和姿态输出接口。单封装IMU适合体积和功耗受限的应用,能够提供稳定的姿态测量和运动感知能力,但其性能上限通常低于多芯片模块式IMU,因此在战术级或高精度导航需求中并不常用。
综上,单封装或高度集成式IMU的核心价值在于小型化和低功耗,其封装方式为消费电子和便携系统提供了理想的工程解决方案。尽管在精度和长期稳定性上存在一定局限,但凭借体积小、集成度高和可量产的优势,这类IMU成为现代移动和便携应用的主流选择,并与多芯片模块式IMU形成了明确的功能与应用区分。
4.不同封装方式对比
不同封装方式的MEMS IMU在工程实现和性能潜力上各有优势和局限。离散器件式IMU封装灵活,器件独立,调试和替换方便,因此常用于科研实验、原型验证和教学平台中。它最大的优势在于系统构建自由度高,但由于缺乏统一封装约束,轴间误差和零偏漂移容易累积,长期稳定性和高精度实现有限。多芯片模块(MCM)式IMU则在封装和系统一致性上取得显著提升,通过模块化设计将多个惯性器件与信号调理电路集成在同一封装中,有效降低轴间误差、减小封装应力影响并改善温度均匀性。这种封装形式兼顾性能与可靠性,是工业自动化、无人系统以及战术级应用的主流方案。单封装或高度集成式IMU则以小型化、低功耗和量产可行性为核心优势。通过将传感器、信号调理电路甚至部分处理模块集成在单一封装内,单封装IMU在体积和功耗上具有明显优势,适合消费电子、便携设备和轻量级无人机应用。尽管高度集成封装在小型化和一致性方面表现优异,但性能上限通常低于MCM封装,热耦合和封装应力对零偏稳定性构成挑战,因此在高精度导航中不常采用。
总体而言,不同封装方式的选择主要取决于应用需求和性能权衡。离散器件式IMU更适合科研和实验;单封装IMU适合小型化、低功耗场景;而多芯片模块式IMU则在性能、长期稳定性和工程可靠性上取得最佳平衡,成为中高性能应用的主流方案。
MEMS IMU已经广泛应用于无人系统、工业自动化、车载导航、消费电子和航空航天等多个领域。根据精度和应用场景的不同,MEMS IMU可以分为消费级、工业级、战术级以及导航级。不同等级的IMU在零偏稳定性、角速率噪声、加速度计漂移、动态范围和环境适应性等方面存在显著差异。
四、国外产品
1.美国Honeywell
Honeywell是全球知名的高科技企业,在工业、航空航天和国防等领域具有丰富的惯性测量系统经验。其MEMS IMU产品涵盖工业级、战术级和高性能战术级模块,其中HGuide i300面向轻量工业应用,HG3900针对战术级动态环境,HG4930 SClass系列则为高性能战术级IMU,广泛用于无人机、机器人、平台稳定及测绘等应用场景。
2.美国ADI
ADI是全球领先的高性能信号处理与传感器解决方案公司,其IMU产品覆盖从工业级精密 IMU到战术级高性能IMU,应用在工业自动化、导航控制、无人系统、机器人等多个领域。ADI的IMU产品基于其iSensor®/iMEMS® 技术,通过工厂校准实现灵敏度、零偏和轴间对准的补偿,提供高一致性和工程适配性。代表产品包括ADIS16500、ADIS16488、ADIS16467和ADIS16505等,在精度、动态范围和噪声性能方面各有侧重,适合不同精度等级和应用场景。
3.美国Northrop Grumman
Northrop Grumman是全球领先的航空航天与防务科技公司,其惯性导航与姿态测量系统在军事、空间和航空领域长期处于行业前沿。在惯性测量单元(IMU)的技术布局中,一方面以其经典的光纤陀螺 IMU(如 LN200 系列)闻名,另一方面旗下Northrop Grumman LITEF GmbH(德国子公司)长期开发高可靠性MEMS IMU模块,如µIMU系列,适用于飞行控制、平台稳定与导航控制等场景。北罗普格鲁曼也基于其最新MEMS与QMG(Quad Mass Gyro)技术推出了LR500四质量陀螺IMU,将MEMS器件性能推向接近战术级甚至近导航级别的应用。
4.美国VectorNav Technologies, LLC公司
VectorNav Technologies, LLC是一家成立于2008年的高性能惯性导航与测量系统公司,专注于利用最新MEMS惯性传感器、GNSS技术与先进滤波算法开发紧凑、低功耗但高精度的IMU、AHRS(姿态航向参考系统)和GNSS/INS产品。VectorNav的产品广泛应用于无人系统、机器人、测绘平台、航空航天以及工业定位等领域,其代表性产品包括VN100、VN110、VN200和VN300等。VectorNav的IMU产品不仅提供原始惯性数据,还集成了实时姿态解算和导航融合算法,优化了SWaPC(尺寸、重量、功耗与成本)性能。

VN系列IMU
5.美国Inertial Labs
Inertial Labs(现为VIAVI Solutions子公司)专注于高性能MEMS IMU、INS和AHRS系统,产品广泛应用于无人机、导航控制、平台稳定、船舶和航空等领域。公司通过高精度MEMS陀螺仪与加速度计、工厂温补校准以及滤波算法,实现工业级与战术级IMU的可靠性能。代表性产品包括IMU-NAV-200(战术级旗舰)、IMU-NAV-100(工业/高性能)以及Kernel-210(小型化高精度)。

Kernel-210
6.法国Safran
Safran是全球领先的航空航天与国防集团,其惯性与传感业务由SST统一布局,在高端惯性导航领域具有长期技术积累。在MEMS惯性技术方向,Safran通过旗下挪威公司Sensonor AS形成了具有国际影响力的高性能MEMS IMU产品线。Sensonor的MEMS IMU以低噪声、高稳定性和优异的温度性能著称,在战术级MEMS IMU领域具有标杆意义,代表性产品包括STIM300、STIM318和STIM210,广泛应用于无人系统、制导控制、平台稳定和高可靠惯性测量场景。其中STIM300通常被认为是当前性能最高、应用最广泛的战术级MEMS IMU之一。
7.日本TDK
TDK株式会社是全球领先的电子元器件与传感器厂商,在MEMS传感器领域具有深厚技术积累。通过旗下的InvenSense,TDK在消费电子、工业控制和汽车电子等领域建立了完整的MEMS惯性传感器与IMU产品线。TDK的MEMS IMU以高度集成、低功耗和成熟工艺著称,广泛应用于智能终端、机器人、工业设备和部分汽车与无人系统场景。其代表性IMU产品包括ICM-42688-P(工业级主流)、IAM-20680(早期高集成 IMU)以及ICM-20948(多传感器融合型IMU),其中高端型号在噪声和稳定性方面已明显优于传统消费级MEMS IMU。
8.ST
ST在MEMS传感器领域具有极强的规模化制造能力和成熟的工艺平台,其MEMS IMU产品广泛应用于消费电子、工业控制、汽车电子和部分中高可靠性场景。ST的IMU技术路线以高集成度、低功耗和可靠一致性为核心优势,产品线覆盖从消费级到工业级,并在ASM330系列中实现了其当前精度最高的MEMS IMU水平,代表了ST在工业级与高可靠惯性测量方向的最高能力。
ST的MEMS IMU产品明显体现出从消费级向工业级逐步延伸的技术演进路线。IIS2ICLX针对工业环境进行了可靠性与温度范围强化;而ASM330系列是ST当前精度最高、噪声最低的MEMS IMU产品,在零偏稳定性和噪声密度方面已显著优于传统消费级器件,适用于机器人、工业惯性测量和中等精度姿态解算场景。总体而言,ST的MEMS IMU 更强调可量产性、一致性与系统集成便利性,而非战术级或导航级极限精度。
9.德国Bosch Sensortec
Bosch Sensortec是博世集团(Robert Bosch GmbH)旗下专注于MEMS传感器与系统解决方案的子公司,是全球MEMS技术的奠基者与领导者之一。Bosch在MEMS惯性传感器领域拥有深厚的工艺积累和极强的规模化制造能力,其MEMS IMU产品长期占据消费电子市场主导地位,并逐步向工业与汽车级应用延伸。Bosch的技术路线以高一致性、低功耗和成熟算法生态为核心优势,其IMU产品广泛应用于手机、可穿戴设备、AR/VR、工业运动感知以及汽车电子等领域,其中BMI/BHI系列代表了Bosch在高性能MEMS IMU方向的最高水平。
10.法国SBG Systems
SBG Systems是一家总部位于法国的高端惯性系统厂商,专注于中高精度MEMS IMU与MEMS INS的设计与制造。与以器件规模化为主的MEMS厂商不同,SBG Systems更强调系统级性能、标定能力和算法融合,其产品广泛应用于海洋测量、测绘、无人系统、工业定位以及国防相关领域。SBG的技术特点在于充分挖掘MEMS器件潜力,通过精细化标定、温度补偿和高性能导航算法,使MEMS IMU的整体性能逼近传统光学陀螺系统,在工程应用中具有很强的竞争力。
五、国内产品
1.芯动联科
芯动联科是一家专注于高性能MEMS惯性器件与IMU系统的国内企业,其技术路线以自主MEMS结构设计为基础,结合系统级标定与补偿方法,面向中高精度与战术级MEMS IMU应用场景。与偏重消费电子的MEMS厂商不同,芯动联科从成立之初即聚焦惯性导航与测量领域,产品主要面向无人系统、工业测量和导航定位等对稳定性和一致性要求较高的应用。整体来看,其产品定位与SBG Systems、ADI高端 MEMS IMU接近,是国内少数明确向中高端MEMS IMU迈进的代表性企业。

IMU188
芯动联科目前已形成一条较完整的MEMS IMU产品线,从工业级(如IMU188、IMU485)到战术级(如IMU588)以及工业稳定平台(IMU800系列)都有覆盖。特别是IMU588,其零偏稳定性和随机噪声指标已进入0.5°/h级别,在国内属于领先性能水平,具备与国际同类战术级MEMS IMU工程对比的能力。整体上,芯动联科的产品更强调系统级一致性、长期稳定性和工程适配能力,非常适合用于惯性导航融合、无人系统姿态控制和中高端工业运动测量等场景。
2.北微传感

北微传感的代表性IMU产品包括NW-IMU100/200系列与NW-IMU300系列,其中NW-IMU300代表了国内MEMS IMU向更高稳定性与更低噪声方向迈进的工程级产品方向,适用于无人机平台、机器人控制、姿态解算等对稳定性与一致性有较高要求的场景。
3.华测导航
华测导航(CHC Navigation,简称CHCNAV)是国内知名的测绘与导航设备供应商,其产品覆盖GNSS接收机、组合导航系统(GNSS/INS)、MEMS IMU和惯性测量模块等。华测导航的MEMS IMU既有单独器件模块(如CI-710)用于姿态与动态测量,也内置于其GNSS/INS系统中用于提高整体定位与姿态精度,其技术融合了惯性测量与精密算法,多用于工程测绘、自动驾驶测试、机器人导航等场景。
4.上海矽睿科技
矽睿科技的IMU主要是芯片级和模组级产品,定位覆盖消费级与工业/汽车级应用,代表性IMU产品包括QMI8A01、QMI8A01z和QMI8658等六轴IMU芯片/单元。这些产品的优势在于高集成度、小尺寸、低噪声设计和强接口兼容性,适合智能终端、机器人、工业控制等多种场景。
六、结语
随着MEMS技术的不断发展,MEMS IMU已经从早期的消费电子应用逐步拓展到工业、汽车、无人系统和高精度导航等更广泛的领域。从加速度计与陀螺仪的器件基础,到封装形式、系统集成,再到国内外代表性厂商的产品对比,可以清晰地看到IMU技术正在形成多层次、差异化的发展格局。国外厂商在高精度、导航级IMU上依然保持领先优势,而国内企业则在消费级和工业级应用中快速追赶,尤其是在芯片设计、模块集成和量产能力方面取得了显著进步。国产MEMS IMU的生态正在逐渐完善,未来有望在高可靠性、高精度、低功耗和智能化融合等方向实现更大突破。










