在电机工程中,有时候需要输出带死区的0%和100%的占空比PWM波形,以达到过调制效果。
在单片机PWM调试的日常工作中,很多工程师对“0%占空比”和“100%占空比”的认知往往停留在教科书层面——前者意味着无输出,后者则对应持续高电平。但当你真正面对电机驱动、逆变电源这类需要互补PWM输出的项目时,情况就变得复杂了:上下桥臂必须插入死区时间来防止直通短路,而常规的占空比调整逻辑在接近0%和100%边界时反而容易失效。
本文以RA6T2为例,介绍在使用RA-T系列芯片建立电机工程时,如何使用GPT的互补PWM模式输出带死区的0%和100%的占空比波形,其结果可推广应用到其他系列芯片和相关领域。
在系统设计确定的情况下,母线电压的值受硬件设计限定,是确定的、有限的。根据电压方程式分析,电机的可运转速度具有理论上限。有时根据控制需要,可以应用过调制的方法,在限定母线电压范围内,提高输出电压利用率,从而达到提高瞬时过载能力、动态响应速度等控制效果。
RA6T2的GPT模块,有4种互补PWM模式。主要的区别是缓冲寄存器的传送时刻不同:
(1)互补PWM模式1(在波峰传送)
(2)互补PWM模式2(在波谷传送)
(3)互补PWM模式3(在波峰和波谷传送)
(4)互补PWM模式4(立即传送)
当使用RA6T2设计电机系统时,可使用GPT的互补PWM模式3,输出带死区的0%和100%的占空比PWM波形。
使用互补PWM模式3,默认锁定三个连续的通道。根据芯片默认设置,可以使用GPT1,2,3作为一组配合输出,或者选择GPT4,5,6作为一组配合输出。

使用时,最低标号的通道作为主通道,相邻两个高标号通道作为从属通道。每个通道的计数器GTCNT按照主通道的周期循环并独立计数。对于每个通道,计数器在计数过程中,当GTCNT与GTCCRA发生比较匹配时,正向和负向的波形分别从GTIOCn+iA(i=0,1,2)和GTIOCn+iB管脚输出,并且根据主通道的GTDVU寄存器的值,输出死区时间。GTCCRA寄存器带缓冲功能,GTCCRC、临时寄存器A、GTCCRD作为缓冲寄存器使用。详细讲解,请参看数据手册21.3.3.7章节部分。
(100%和0%输出的原理性讲解和时序图讲解)
一般占空比模式输出时,发波逻辑请参看数据手册figure21.52所示:

当GPT工作在互补PWM模式3时,GPT32n+i.GTCNT按如上图方式循环计数。从图中可以注意到,GPT32n.GTCNT和GPT32n+1.GTCNT在计数时差一个死区时间的数值。这样在与GTCCRA发生匹配时,GTIOCnA和GTIOCnB将输出带死区的PWM波形。当缓冲寄存器的值发生更新后,在互补PWM模式3的机制下,GTCCRA将在波峰和波谷更新。
当需要输出带死区的100%占空比波形时,请参看数据手册figure21.61:

当GTCCRA的值设定大于等于周期值加死区时间计数值时,匹配无法发生,则因匹配对应的端口翻转动作就不会发生。GPT32n+i.GTCNT仍然按设定继续计数。在这种情况下,GPT将一直输出100%占空比波形。
当需要输出带死区的0%占空比波形时,请参看数据手册figure21.67:

GTCCRA的值设定为0时,匹配无法发生,则匹配对应的端口动作也不会发生。GPT32n+i.GTCNT仍然按设定继续计数。在这种情况下,GPT将一直输出0%占空比波形。
样例设计:
使用GPT4,5,6通道作为PWM输出通道,并设置工作模式为为互补PWM模式3,设定PWM波周期为125us,占空比按如下形式交替变化,并循环往复输出:
1)50%占空比
2)100%占空比
3)50%占空比
4)0%占空比
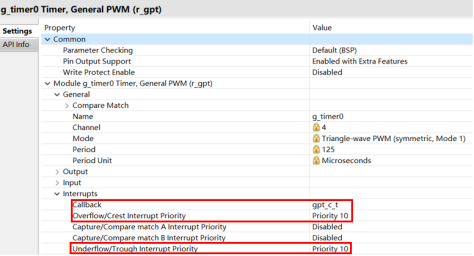
在FSP中的配置如下图所示,将GPT4通道波峰、波谷中断使能。
GPT初始化相关的关键工程代码如下:
R_GPT4->GTCR_b.MD = 0x0E;R_GPT5->GTCR_b.MD = 0x0E;R_GPT6->GTCR_b.MD = 0x0E;//设置使用互补PWM模式3R_GPT4->GTPR = 0x1D4C;//;R_GPT5->GTPR = 0x1D4C;//;R_GPT6->GTPR = 0x1D4C;//;R_GPT4->GTPBR = 0x1D4C;//;R_GPT5->GTPBR = 0x1D4C;//;R_GPT6->GTPBR = 0x1D4C;//;R_GPT4->GTPDBR = 0x1D4C;//;R_GPT5->GTPDBR = 0x1D4C;//;R_GPT6->GTPDBR = 0x1D4C;//设置周期125us;R_GPT4->GTIOR_b.GTIOA = 0x09;R_GPT5->GTIOR_b.GTIOA = 0x09;R_GPT6->GTIOR_b.GTIOA = 0x09;R_GPT4->GTIOR_b.GTIOB = 0x06;R_GPT5->GTIOR_b.GTIOB = 0x06;R_GPT6->GTIOR_b.GTIOB = 0x06;//设置引脚输出PWM波形具体形态R_GPT4->GTBER2_b.CP3DB = 0;//R_GPT5->GTBER2_b.CP3DB = 0;//R_GPT6->GTBER2_b.CP3DB = 0;//使能双buffer功能R_GPT4->GTCCR[0] = 0x0EA6;R_GPT5->GTCCR[0] = 0x0EA6;R_GPT6->GTCCR[0] = 0x0EA6;R_GPT4->GTCCR[2] = 0x0EA6;R_GPT5->GTCCR[2] = 0x0EA6;R_GPT6->GTCCR[2] = 0x0EA6;R_GPT4->GTCCR[4] = 0x0EA6;R_GPT5->GTCCR[4] = 0x0EA6;R_GPT6->GTCCR[4] = 0x0EA6;//预设50%输出
在中断callback函数内设置循环发波逻辑,并更新PWM占空比:
if(g_user_count<1000) g_user_count++; // 循环控制基准递加if(g_user_count<=31){u2_count_u = (uint16_t) ((u2_temp_base * (0.5F)) + (u2_temp_deadt * 0.5F));u2_count_v = (uint16_t) ((u2_temp_base * (0.5F)) + (u2_temp_deadt * 0.5F));u2_count_w = (uint16_t) ((u2_temp_base * (0.5F)) + (u2_temp_deadt * 0.5F));}//设置占空比50%elseif(g_user_count<=93){u2_count_u = (uint16_t) ((u2_temp_base * (1.0F))+ (u2_temp_deadt));u2_count_v = (uint16_t) ((u2_temp_base * (1.0F))+ (u2_temp_deadt));u2_count_w = (uint16_t) ((u2_temp_base * (1.0F))+ (u2_temp_deadt));}//设置占空比0%elseif(g_user_count<=124){u2_count_u = (uint16_t) ((u2_temp_base * (0.5)) + (u2_temp_deadt * 0.5F));u2_count_v = (uint16_t) ((u2_temp_base * (0.5)) + (u2_temp_deadt * 0.5F));u2_count_w = (uint16_t) ((u2_temp_base * (0.5)) + (u2_temp_deadt * 0.5F));}//设置占空比50%elseif(g_user_count<=186){u2_count_u = (uint16_t) (0);u2_count_v = (uint16_t) (0);u2_count_w = (uint16_t) (0);}//设置占空比100%else{g_user_count = 0;}//循环一周,计数清0R_GPT4->GTCCR[4] = (uint32_t) u2_count_u;R_GPT5->GTCCR[4] = (uint32_t) u2_count_v;R_GPT6->GTCCR[4] = (uint32_t) u2_count_w;//设置占空比寄存器
用示波器采集输出波形,黄色为GTIOCnA引脚输出,绿色为GTIOCnB引脚输出,紫色为PWM波峰、波时刻,采用翻转I/O口的方式同步指示波峰、波谷时刻,上升沿为波峰,下降沿为波谷。运行样例工程后测试波形如下系列图所示。
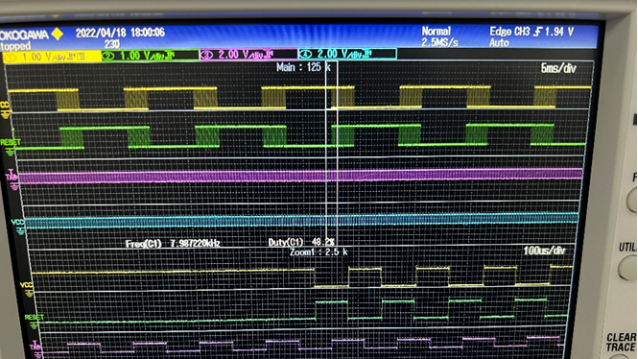
100%到50%的波峰更新细节

50%到0%的波峰更新细节

0%到50%的波谷更新细节

50%到100%的波谷更新细节

100%到50%的波谷更新细节

50%到0%的波谷更新细节
本文介绍在RA-T系列芯片设计电机项目时,使用GPT输出带死区的0%和100%的占空比PWM波形,并展示了关键FSP设置步骤和测试程序关键代码。如需样例工程,请复制下方链接至浏览器,或扫描二维码查看下载。
例程下载地址:
https://gitee.com/recn-mcu-ae/overmodulationshare
------------ END -----------