早晨醒来,你想喝一杯咖啡。对大多数人来说,这意味着伸手、握杯、端起三个连贯动作,耗时不过数秒。但对于脊髓损伤或肌萎缩侧索硬化症(ALS)患者,这套动作可能意味着需要另一位人类全程协助,甚至永远无法独立完成。
如果仅仅通过"想象"自己伸手,一台机械臂就能同步完成取杯、握杯、递送,甚至根据杯子的重量自动调整抓握力度——这并非科幻电影,而是脑机接口机器人控制领域正在攻克的日常命题。
2026年,卡耐基梅隆大学贺斌教授等在《国家科学评论》(在National Science Review上发表综述,系统梳理了这一领域二十年来的突破与瓶颈。他们的判断是:我们正站在一个转折点上,非侵入式脑机接口即将从实验室的"概念验证"走向家庭环境的"实用助手"。

机器人控制,为什么比其他BCI应用更难?
脑机接口的应用很多,从拼写器到无人机,但机械臂和机械手控制被公认为最具挑战性的应用场景之一。原因藏在日常生活的细节里。
控制一架无人机在平面导航,本质上只需要前后左右和升降几个指令。但当你想端起一杯水,肩关节、肘关节、腕关节需要协同旋转,手指要形成恰到好处的握力,拇指与食指还得根据杯柄形状做细微调整——这些动作连续、高维、且往往是非线性的。换句话说,机器人导航是"指路",而机器人操作是"跳舞"。
学界为此付出了近二十年的努力。2016年,Meng等人在Scientific Reports上报道了首个非侵入式机械臂控制系统,受试者通过运动想象(motor imagery)在三维空间中导航机械臂,完成抓握(reach-and-grasp)任务。这标志着人类首次无需开刀,仅凭头皮脑电(EEG)就能让机械手触碰现实世界。
但这只是第一步。早期的控制更像"开关式"的离散指令:想一次,动一下,卡顿而笨拙。真正的突破发生在连续控制范式的成熟。2019年,Edelman等人在Science Robotics发表的研究实现了连续轨迹控制与目标追踪,机械臂首次能像人类手臂一样画出平滑的弧线。到了2025年,Ding等人在Nature Communications上进一步将精度推进到手指级别——非侵入式BCI已经能支持独立的机械手指动作,为抓握不同形状的物体提供了可能。
AI如何解码模糊的脑电
非侵入式BCI面临的核心物理瓶颈在于信号质量。EEG穿过颅骨和头皮后,空间分辨率低、噪声大,传统的手工特征提取就像隔着毛玻璃辨认人脸。
深度学习的介入改变了游戏规则。以EEGNet和EEG Conformer为代表的网络架构,能够自动学习空间-频谱滤波器,近似数据驱动的带通滤波和通道加权;卷积层捕捉局部特征,循环网络和Transformer则进一步挖掘神经时间序列中的动态依赖。更重要的是,这种分层特征学习能从原始信号中逐步抽象出与任务相关的表征,大幅减少了对人工设计特征的依赖。
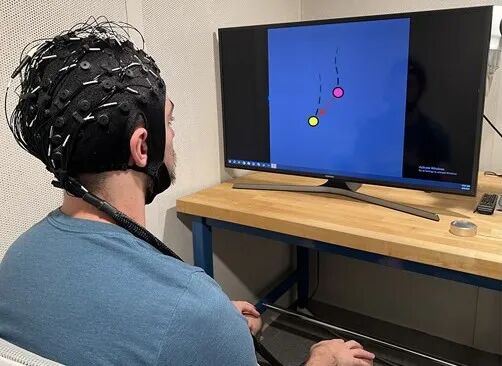 |  |
脑电图脑机接口示意图。A) BCI设置,其中用户与计算机交互,并记录其意图并从脑电图中解码。B)脑机接口的运动想象控制范例。
研究人员在综述中指出,这些模型尤其擅长捕捉非线性、分布式且个体特异性的神经表征。在实际应用中,基于深度学习的实时解码系统已经支持连续的机械臂抓握动作,以及精细的机械手指控制,其性能系统性地超越了传统方法。
共享自主:不是替代你,而是帮你"搭把手"
如果你以为未来的BCI机器人需要用户"全神贯注地指挥每一个关节角度",那可能低估了工程师们的考虑。
一个更现实的方案是"共享自主"(shared autonomy):BCI负责解码用户的高层级意图——比如"我想拿起那个杯子"——而低层级的执行细节,如路径规划、避障、握力调整,则交给AI自主完成。这就像一个经验丰富的护理员,你只需开口,他就能心领神会地把水递到你嘴边。
这种框架大幅降低了用户的认知负荷。近年来,强化学习(reinforcement learning)被用于优化控制策略,使系统能在与环境的交互中自适应调整;大语言模型(large language models)则被用来从嘈杂或模糊的神经信号中推断上下文意图。2025年,Lee等人在Nature Machine Intelligence报道的AI辅助机器人控制,已能让瘫痪患者用非侵入式BCI连续操控随机摆放的物体;同年,Bellicha等人在Journal of Neural Engineering发表的临床试验显示,结合红外环境感知与皮层脑电(ECoG)的共享控制,能有效辅助四肢瘫痪患者完成轮椅导航和reach-and-grasp任务。
 图1 非侵入式脑机接口机器人控制示意图
图1 非侵入式脑机接口机器人控制示意图
这张图展示了完整的闭环:神经信号被解码为人类意图,驱动轮椅、机械臂或机械手;同时,任务先验与传感器输入汇入基于AI的机器人自主模块,形成共享控制;执行结果再通过闭环反馈传递回用户,完成感知-行动的循环。
临床落地:最后一公里还有多远?
尽管技术曲线陡峭上升,从实验室到卧室的距离仍然真实存在。
首先是"人"的异质性。许多BCI系统主要在健康受试者中验证,但疾病导致的神经动力学改变、个体学习能力的差异,使得部分患者难以适应同一套解码模型。正如综述所强调的,需要更深入地理解疾病特异性机制和神经重组规律,才能提升解码的鲁棒性。
其次是长期可用性。今天的深度学习模型大多在公开数据集上进行离线验证,不同数据集之间的泛化能力仍是问号。BCI的核心价值在于实时人机交互,因此在线实验和闭环系统评估应当成为方法学研究的黄金标准,而非可选项。
更不容忽视的是安全与伦理。解码错误可能导致机械臂的误动作,敏感神经数据的存储与使用也呼唤清晰的监管框架。随着这些系统走出实验室,可靠性、标准化和用户保护必须被置于首位。
未来:当机械臂学会"猜"你的意图
展望下一步,贺斌认为,神经解码算法与机器智能的深度融合将定义下一代系统。基础模型(foundation models)是一个令人兴奋的方向——通过在大量无标注神经数据上预训练,学习通用的神经表征,再针对具体任务进行少量校准,有望解决非侵入式BCI长期困扰的个体适应难题。
更具前瞻性的构想是"共适应"(co-adaptation):系统不再是被动的解码器,而是能根据用户的意图、表现和认知状态动态调整辅助级别。这意味着机械臂会越来越"懂"你,在你要放弃时多搭一把力,在你熟练时退居幕后,让人机交互趋于直觉化。
重塑认知:从"替代身体"到"扩展身体"
这项综述触及的深层命题,关乎人类与机器的关系本质。传统上,辅助机器人被视为"替代失效身体"的外部工具;但在BCI的闭环中,机械臂更像是神经系统的自然延伸——它接收的是运动意图,而非键盘指令;它反馈的是触觉与位置,而非冰冷的数字。
也许未来的某一天,一位瘫痪多年的患者会在清晨醒来,自然而然地"想"起一杯咖啡。机械臂会流畅地伸向桌面,五指自适应地包裹杯柄,以恰到好处的力度端起,递到唇边——整个过程如同他自己伸出手臂一样自然。到那一天,BCI将不再是一项"技术",而是无数普通人重获生活尊严的基础设施。
参考:Yidan Ding, Bin He, Brain-computer interfaces for robotic control, National Science Review, 2026;, nwag269

脑机接口社区是国内首家脑机接口(BCI)产业服务平台、国内脑机接口新媒体开创者与引领者。主要为企业、科研团队、投资机构和从业者提供以下服务:
宣传报道:图文、短视频、直播形式报道企业动态、技术解读、产品介绍等内容,提升曝光和行业影响力。
资源对接:根据需求匹配资本、供应链、临床机构、渠道方等资源,完成真实对接,促进合作。
成果转化:协助技术团队寻找产业方、投资人及落地场景,推动技术到产品的转化。
活动策划执行:承接线上线下路演、沙龙、论坛等活动的策划与执行。
其他定制需求:包括报告定制、市场调研、人才招聘支持等个性化服务。
合作洽谈,请联系微信:ZuoLeiLeiya
(备注:姓名-单位-合作)
投稿丨成为创作者,请联系微信:RoseBCI

🌟星标置顶🌟
不错过每一条脑机前沿进展

一键三连「分享」、「点赞」和「在看」
欢迎在评论区聊聊