随着Physical AI(物理AI)时代的呼啸而来,具身智能正加速向真实物理场景纵深渗透。世界模型正在逐渐成为具身智能新宠,但定义缺位与物理常识的缺失,让世界模型沦为视觉奇观,更让传统范式在“泛滥与失效”的割裂中触顶。
在近日举行的第八届北京智源大会上,智源研究院孵化的「星源智」交出了一份极具颠覆性的答卷:ω-EVA具身交互世界模型。
让世界模型成为“未动先知”的物理推演器,以“预演后果修正动作”的闭环,有望彻底重塑从感知到执行的机器人与物理世界的交互法则。
认知错位:世界模型潜力未被充分释放
作为机器人理解物理世界、执行任务的核心底座之一,世界模型的战略价值已达成产业共识。但繁荣背后仍暗藏深刻的认知错位:世界模型本质内涵和边界至今尚未被真正定义。
这种“共识前置与定义缺位”的割裂,直接催生了技术演进的无序:模型范式泛滥与真实物理效能失效悖论般并存。
从技术第一性原理来看,主流世界模型可大致为分三类:用于训练的未来生成模型、侧重表征的隐空间预测模型及充当数据引擎的仿真模型。
但受大多传统具身模型方案沿用“预测-执行”逻辑制约,三者之间有一个共同的缺陷:均偏向离线训练与辅助推演,即负责感知环境、推演画面,游离于机器人动作决策之外,无法介入机器人实时动作决策。
导致世界模型本应具备的物理因果推理、动态交互、自主修正等核心潜力,始终未能得到充分释放。
在动态高维交互中,缺乏物理常识锚定的模型注定沦为逼真的视觉奇观;而物理规律的失真,必然导致长尾场景泛化的无力。
简单来说,若把模型搭载在本体上,只能机械执行指令,面对抓取偏移、物体倾倒、环境变化等真实场景中的常见问题,难以及时纠错,任务稳定性大打折扣,能预测、难落地成为全行业通病,这也彻底暴露了传统技术路线的结构性天花板。
显然,世界模型正在经历“期望之巅”到“落地之困”。具身智能亟需穿透概念迷雾,以Physical AI的本质需求为锚点重定义世界模型,探寻底层架构的代际突破。
范式革新,重新定义交互式世界模型
本次星源智发布的「ω-EVA 具身交互世界模型」,作为目前全球运行速度领先、搭载动作反思闭环的端侧世界模型,直击行业传统短板,有望推动具身智能从“能动”真正走向“稳动”。
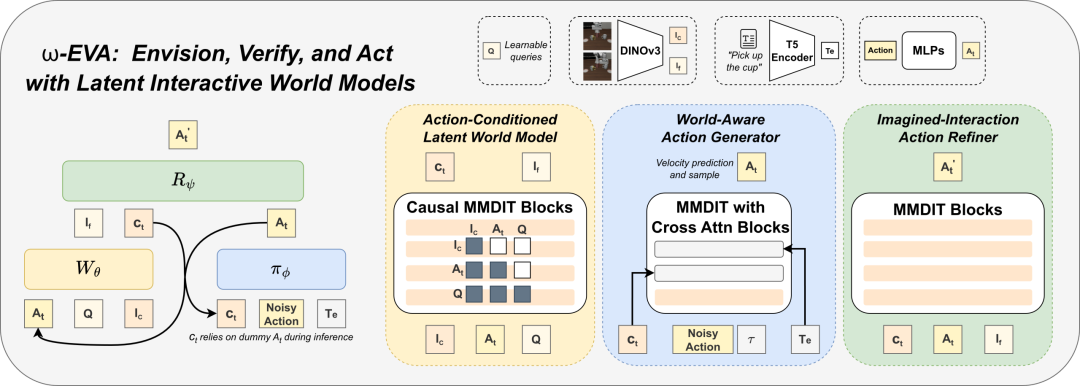
区别于传统世界模型专注训练辅助、离线仿真、画面生成不同,ω-EVA构建了一整个「动作提案—后果预演—动作修正」核心技术闭环。它将世界模型深度融入机器人动作生成全流程持续“预测、修正”,并形成从预测、推演到行动的连续交互的“自进化”闭环。
据悉,ω-EVA采用三阶段训练架构,前两个阶段完成基础能力搭建和参数冻结,仅第三阶段做交互优化,且全程在潜在空间完成推演,不用生成视频画面,兼顾运行效率与端侧适配性。
第一阶段:搭建动作条件世界模型,让模型重点识别机械臂、交互物体等动态目标,输出环境表征与动作执行后的未来状态;
第二阶段:结合视觉、语言指令生成初始动作方案,这也是当下主流机器人模型的基础能力;
第三阶段:核心交互环节,将初始动作回传至世界模型预判后果,再结合现场状态、原始动作、预演结果完成动作修正。

ω-EVA的创新之处在于,将世界模型内化为“行动前的后果反馈模块”,使机器人在物理执行前,即可自主仿真推演“自身动作对物理世界的影响”,并依此形成前馈补偿,不断形成“感知-预演-修正-执行”的全链路交互闭环。
这一架构的颠覆性在LIBERO、LIBERO-PLUS、RoboTwin 2.0三大权威仿真基准测试中得到印证:在零样本(未进行专项预训练)条件下,ω-EVA依然展现出SOTA级性能,达到行业顶尖水平。
其中,LIBERO任务平均成功率高达98.6%;在RoboTwin 2.0中,经动作修正机制加持后,成功率从88.9%跃升至90.3%,充分验证了交互闭环对具身任务鲁棒性的显著提升。
为将底层技术能力转化为直观的产业感知,星源智在大会现场同步展示了四大真实落地场景,深度覆盖工业生产、公共服务、生活交互与空间推理领域。从精密作业到复杂认知,此举不仅是对ω-EVA模型泛化能力的全方位压力测试,更让该模型在真实物理世界中的泛化交互能力有了实证。
华容道互动场景中,机器人依靠 ω-EVA 实时推演每一步操作的后续变化,动态调整移动路线,展现强大的空间推演与规划能力;切入流水线智能分拣的工业复杂工况,机器人通过识别动态物料,预演抓取轨迹,有效规避动态干扰,能有效提高作业成功率;机器狗清洁官在户外多变环境中,能无缝串联“导航、识物与捡拾”,印证了模型的泛化韧性;服务机器人则依托精准的物理交互直觉,能精准完成咖啡取放、递送等精细操作,将物理碰撞、倾倒风险降低甚至为零。

依托这一独创的交互技术路线,星源智彻底打通了世界模型从“开环预测”走向“闭环执行”的最后一公里,一举打破了行业长期存在的“预测与行动脱节”魔咒。
在此范式下,世界模型不再仅作物理世界的被动模拟器,而是蜕变为驱动机器人实时决策与前置风控的核心引擎。星源智率先将世界模型引入决策内环,这不仅是对技术架构的底层重塑,更有望在产业格局中为其牢牢确立了“交互式世界模型”品类开创者与定义者的地位。
竞争升维:锚定下一代具身大脑发展方向
ω-EVA的问世,其意义远超单一模型的技术迭代,更折射出星源智对下一代具身智能中枢的底层洞察:未来“具身大脑”的进化法则,必将跨越必单纯的指令驱动与开环生成,全面跃迁至“交互因果推演与动作闭环修正”的新范式。
智源大会期间,星源智创始人兼CEO刘东在具身智能CEO论坛圆桌讨论中强调:大模型只有真正部署到机器人端侧,才能进入实时感知、决策与控制链路,转化为可用的具身智能能力。世界模型如果只能停留在云端计算、离线推演或训练辅助阶段,就难以对机器⼈当下的动作形成即时反馈。
星源智联合创始⼈、智源研究院具⾝交互世界模型研究中心负责人孙振国则在演讲中提出三点核心判断:第一,世界模型不应该只在训练时预测未来,而应该真正参与动作生成;第二,多模态不是简单增加输入,而是让视觉、本体状态、触觉等不同感知以合适的结构参与决策;第三,具身模型最终应该从⼀次性的预测和动作生成,走向持续感知、想象与修正,并在真实交互反馈中不断校准对物理世界的理解。
ω-EVA 正是循着该路径,让策略先提出候选动作,再预演其可能后果,并在执行前完成动作修正,真正实现了从“预测未来”到“干预未来”的跨越。

站在产业发展的十字路口,具身智能的竞争范式已然更迭:规模化部署不再取决于单一模型或硬件的峰值参数,而是考验“具身大脑+世界模型+多模态交互+端侧算力+场景交付”五位一体的架构闭环能力。
从工程落地视角来看,成熟的机器人解决方案应该是一个紧密耦合系统:以ω-EVA为代表的交互型世界模型作为推演中枢,依赖专用端侧算力提供实时推理保障,并需与多模态感知、底层软体及场景数据形成双向反馈。
在此系统级命题下,单点技术的孤岛式突围,已无法构筑有效的商业护城河。星源智凭借“技术+商业”双轮驱动模式,成立仅十个月斩就获10亿元融资,足以证明资本市场对其路线的认可。
纵观产业版图,从上游核心技术赋能,到中游软硬件深度耦合,再到下游场景的闭环交付,星源智已彻底贯通全链路。而ω-EVA正是筑牢这一生态闭环的基座引擎,成为连接机器人厂商与终端客户的关键纽带。
审视ω-EVA的本质,其意义已绝非一款迭代产品,而是重塑行业底层逻辑的核心载体。它一举击碎了世界模型“重预测、轻交互”的路径依赖,将传统“单向预测—开环执行”的线性架构,重构为“动作提案—物理推演—实时修正”的闭环系统。
这一架构跃迁,让机器人真正拥有了“三思而后行”的决策定力,从根源上弥合了复杂物理场景下动作失准与系统鲁棒性不足等致命短板。
未来,随着交互式世界模型理念逐步普及,以及端侧具身模型、多模态交互、软硬一体化方案持续迭代,2026 年有望成为机器人规模化落地元年。而星源智也将持续深耕具身大脑赛道,以技术创新驱动产业变革,助力整个具身智能行业稳步迈入全面商用的新时代。