具身智能(Embodied AI)标志着人工智能从云端“虚拟大脑”演进为具备物理实体、能与真实世界交互的“智能体”。在这场架构转型中,机器人灵巧手(Dexterous Hand)作为执行末端操作最复杂的组件,被公认为机器人领域“皇冠上的明珠”。灵巧手不仅是物理交互的触角,更是感知与决策融合的边缘中心。其对微米级精度、毫秒级闭环以及高度确定性的要求,正直接驱动底层半导体芯片从通用计算向专用实时异构架构的代际变革。
市场规模与增长预期:受人形机器人量产化进程驱动,中国具身智能市场规模预计在2025年达到9,150亿元人民币,并于2026年正式突破万亿大关。放眼全球,人形机器人长期总可达市场(TAM)到2050年预计将达到7.5万亿美元。
BoM价值链的战略性位移——“机械降权,硅片升值”: 根据权威行业研究的成本结构预测,灵巧手硬件物料清单(BoM)正经历一场深刻的权力转移:
硅片端升值:芯片(包括MCU/DSP/PMIC/总线接口芯片等)的价值占比将从2026年的5%大幅攀升,至2035年将达到12%,并于2040年锁定在15%。
机械端降权:与此形成鲜明对比的是,减速器(Reducer)占比从15%降至12%,力矩/触觉传感器从24%降至17%。

这一趋势揭示了灵巧手“智能”的重心正在从复杂的机械设计转向边缘侧的算法处理。由于触觉、纹理等异构数据呈指数级增长,底层芯片必须从单一的执行控制向具备异构算力、高集成模拟前端及硬件级安全的“定制化中枢”转型。
对于整机厂商而言,这种价值转移意味着采购策略必须从“低成本组装”转向“芯片级战略协同”。芯片厂商的生存空间将不再取决于通用性价比,而取决于谁能率先将AI推理算子、超高频伺服算法与严苛的安全协议深度硬化进硅片底层。
二、灵巧手芯片的“黄金三角”
为支撑灵巧手实现亚毫米级的精细操作,行业已确立以下技术演进路径:
·小脑运控高频化:灵巧手包含数十个高自由度(DoF)节点,为实现装配精密零件等微秒级确定性控制,芯片电流环频率需向2kHz乃至更高标准演进,响应时延需压低至微秒级。
·感知多模态端侧融合:灵巧手已进化出“全手电子皮肤”,需实时处理压力、力矩、温度、纹理等多模态数据。这要求芯片具备极高密度的感知外设(如4.7Msps采样率ADC)及端侧去噪、滤波的硬件加速能力。
·底层硬件级安全:机器人进入家庭隐私场景,功能安全(IEC 61508/ISO 26262)与数据机密性成为准入标配。芯片需在物理层支持安全启动、分区隔离及针对物理攻击的探测机制。

当前灵巧手芯片的竞争边界已收敛为所谓的“黄金三角”技术范式,这种演进决定了机器人能否跨越实验室与工厂的“结构化环境”鸿沟。只有在底层解决运控实时性与感知的物理不确定性,具身智能体才能在家庭、医疗等非结构化场景中实现大规模商业化落地。这就为产业链芯片供应商构筑了极高的准入门槛。任何无法同时满足“高性能运控”与“隐私合规安全”的芯片,将在未来大规模商业化(尤其是出海和高端看护)中面临被一票否决的生存困境。
下面我们将对“黄金三角”逐一阐述。
三、运控高频化:异构多核架构下的“小脑”响应机制
在灵巧手多指协同场景下,微秒级的确定性控制(Determinism)是系统架构的基石。任何由任务切换或中断嵌套引起的“系统抖动(Jitter)”都可能导致电机力矩震荡,进而损坏操作对象。
在具身智能机器人的“小脑运控”中,国产MCU芯片头部供应商国民技术的MCU系列芯片扮演了核心角色。它们就像是高效的信息处理器,将皮肤感知的微弱电信号转化为精确的关节扭矩。

下表对比了该公司两款核心芯片的技术规格,展现了国产芯片在性能上的突围:
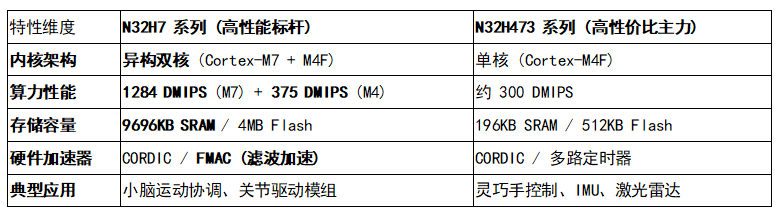
异构双核的任务解耦逻辑:N32H7系列(如 N32H787)采用了 Cortex-M7 + Cortex-M4F 的异构架构,这种设计的本质是实时域与计算域的物理隔离。

消除时延的硅片特性:N32H7引入了“绝对零等待取指”(Zero-wait fetch)技术。在600MHz 高频下,该技术消除了CPU从Flash获取指令的等待周期,解决了复杂函数嵌套下的指令跳转延迟。配合100ps 级高分辨率定时器与硬件CORDIC协处理器(支持整点与浮点三角函数运算),系统可稳定维持2kHz以上的伺服频率,实现硅片级的“性能卸载”。
这种异构双核设计解决了高算力负荷与确定性反馈之间的资源争抢问题。这种任务解耦使得灵巧手能在执行轨迹规划的同时,在亚毫秒级内通过硬核控制做出避障响应。
四、多模态感知融合:端侧异构数据的实时处理瓶颈与突破
过去,机器人主要依赖视觉导航。然而,视觉存在天然的局限性——遮挡、光照变化以及感知延迟。想象一下,仅靠摄像头去抓取一颗圆滑的葡萄,就像是隔着屏幕参加一场延迟2秒的Zoom会议并尝试操作远程手术,那种由于感知缺失带来的“笨拙感”是致命的。
此时,触觉成为了机器人的第二双眼睛。它提供了近场感知的确定性。如果说各种传感器是机器人的皮肤,那么微控制器(MCU)就是“数字神经元”。它负责接收海量的触觉信号,并在一瞬间下达运动指令。
“电子皮肤”的三种模态
为了模拟人类指尖的触敏特性,科学家为机器人研发了由MEMS电容或压阻传感器构建的“电子皮肤”。这种高度集成的感知阵列,能够赋予机器人皮肤以下 3种核心模态:
压力感知(Pressure): 检测接触力的矢量大小。这是实现“力控驱动”的基础,确保机器人在抓取水杯时,既不会因力量太小导致滑落,也不会因力量太大而捏碎杯子。
温度感知(Temperature): 采集瞬态温度变化。在家庭照护场景中,这能让机器人识别物体的冷热状态,防止误触高温物体导致硬件受损或烫伤用户。
纹理与滑动感知(Texture/Slip): 这是精细操作的灵魂。通过捕捉高频振动,机器人能感知物体的粗糙度。更重要的是,它必须以12Hz以上的频率进行闭环调整,在物体即将发生滑脱的毫秒间动态增加握持力。
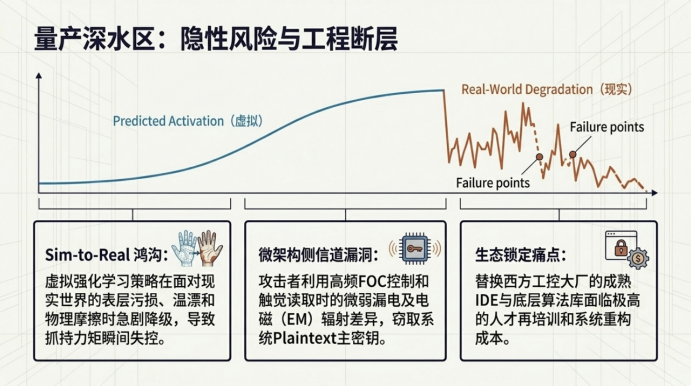
攻克“从仿真到现实”(Sim-to-Real)的鸿沟
在实验室的完美模拟中,触觉信号是纯净的。但在现实世界,柔性皮肤弯曲时产生的物理挤压噪声、关节摩擦力衰减和温漂会产生巨大的“噪声偏移”。这就要求芯片不仅要跑得快,还要具备强大的数学过滤能力,通过跨模态一致性校验,将视觉、位姿与触觉信号进行深度融合,从而消除物理不确定性。
“电子皮肤”产生的海量异构数据(压力、纹理、滑移、温漂)对端侧总线带宽及信号调理提出了极端要求。
国民技术的高性能数据采集引擎N32H473/H7系列内置 4.7Msps 高采样率 ADC,支持差分模式以增强抗干扰能力。这为指尖高密度传感阵列提供了充足的带宽。针对传感器受物理挤压产生的非线性噪声,N32H7集成了 FMAC(滤波加速器),可在硬件层级完成 IIR/FIR 滤波,将CPU从繁重的预处理任务中彻底解放。
端侧就地处理感知数据不仅是为了速度,更是为了通过极低延迟的闭环反馈,动态修正仿真模型与现实物理表现之间的差异,从而稳定抓取非刚性物体。
五、硬件级安全护航:构建机器人端侧的“安全免疫系统”
随着机器人深入个人隐私区域,单纯的软件防护已无法应对物理层面的侧信道攻击(SCA)或固件篡改。必须构建基于硬件根信任(RoT)的安全体系。
系统级安全防护层级
·存储层:通过Flash 加密存储与分区管理(SMPU),防止核心运控算法被物理提取。
·通信层:针对机器人内部总线(CAN-FD/EtherCAT),集成硬件加密引擎支持身份认证与报文加密,防止中间人攻击。
·监管合规:引入“29位机器人数字身份证(Passport系统)”,强制对机器人全生命周期轨迹建档,并利用 Blue-channel/Black-channel 协议确保安全数据在非安全链路中的完整性。
安全认证与防攻击能力
国民技术方案已获CC EAL5+ 与国密二级认证,且针对家庭市场适配了IEC 60730(家电安全)标准。针对侧信道攻击,其物理防攻击探测单元能通过混淆指令主动降低信噪比,防止黑客通过电磁辐射或功耗监控分析获取主密钥。
满足国际主流安全认证(如IEC 61508 SIL 3)不再是选配,而是机器人厂商切入高端医疗、养老及全球工业市场的核心“入场券”。
六、国产主流芯片方案深度对比:N32H7 系列的竞争位势分析
随着半导体供应链主权的收回,市场正经历从TI、ST等国际巨头向国民技术、兆易创新等本土头部厂商的宏观迁移。
主流控制芯片技术指标横向对比表

深度差异化策略分析
国民技术的“安全+感知”错位壁垒:
N32H7:凭借CC EAL5+金融级安全认证与国密硬件引擎,在家庭护理机器人场景中不仅是控制器,更是“合规保险”。其异构双核架构可实现感知(M4)与运控(M7)的物理隔离。
N32H473:其具备的4.7Msps高速ADC与支持64个外部通道的特性,使其成为“高密度感知工作马达”,能够在不增加外部复用器的情况下实现全掌电子皮肤的实时采样。
峰岹科技的“能效墙”优势:FU75XX通过将FOC算法直接硬化进ME内核,在24MHz主频下即可完成6-7微秒的电机闭环,功耗仅15mA。对比通用ARM内核在同等需求下通常需72MHz+频率及50mA电流,峰岹在空间受限、散热敏感的指节节点中极具统治力。
集成度带来的物理空间红利:先楫HPM6E与兆易GD32H7通过集成EtherCAT PHY,可将PCB面积缩减约30%。在1:1比例的人形机器人掌内,这30%的空间节省往往是决定能否实现复杂自由度的关键。
国民技术通过将“金融级安全”注入通用MCU,实现了在隐私敏感场景的错位竞争。随着“Passport”监管落地,N32H7的高安全基因将使其从“备选”快速转化为“准入标准”。
预测未来2-3 年,国产控制芯片市场份额将从5%升至35% 以上。这一跨越将不仅依靠性价比,更依赖于对机器人专用协议栈与安全合规体系的深度适配。
七、未来演进路径:边缘AI推理与后量子密码(PQC)
具身智能的下一站是“视觉-触觉-动作(VLA)”模型的端侧化。
关键技术前瞻
端侧NPU 协处理器:下一代SoC将深度集成NPU,以支持在亚毫瓦功耗下运行物理大模型推理模块(如 DEEPX DX-M2 模式)。
后量子密码(PQC) 布局: 随着量子计算威胁临近,架构师应考虑在ROM层级硬化后量子密码(PQC)算法(如ML-KEM/ML-DSA),防范“现在拦截、后续解密”的风险。
全栈生态构建: 推动“芯片+固件+SDK”交钥匙解决模式。国民技术等厂商应持续强化与传感器供应商的深度绑定,缩短 Sim-to-Real 的开发验证周期。
总结
基于“黄金三角”范式构建的灵巧手架构,不仅赋予了具身智能体“精准操作”的物理能力,更通过硬件级安全手段构筑了“数据主权”的免疫系统。这是机器人从实验室玩具走向万亿级工业级、民用级市场的基石。
参考资料:
1.灵巧手芯片多模态感知与安全技术分析报告
2.具身智能机器人灵巧手芯片技术调研与多模态感知融合产业分析报告
3.CGS International • 02 Mar 26 • "CN : Industrial - Overall - Industry chain tracker: Embodied intelligence gears up for a spring surge"
4.Morgan Stanley Research • 16 Jun 26 • "Investor Presentation: Asia Summer School: Asia Robotics and Humanoids"
5.Bank of America Global Research • 20 Apr 26 • "Greater China Industrials (H/A) : Who Makes the Humanoid Robot (in 2026)? Locomotion first, manipulation follows