©Cleveland Clinic
本体运动觉是感知肌肉活动的感官,是人体自然运动控制的基础。失去前臂的截肢者操控仿生义肢时,始终面临一道难以跨越的障碍:肌肉收缩无法同步传递手部运动的本体感觉,使用者只能依靠视觉判断假肢开合,日常抓取、精细操作效率大打折扣。
近日,由意大利圣安娜高等研究院、美国克利夫兰诊所等机构团队合作发表于《Science Advances》的一项跨国联合研究,推出一款肌动运动觉接口MKkI(Myokinetic Kinesthetic Interface),仅通过植入前臂肌肉的微型永磁体远程振动,就能让截肢者感知到完整、协调的手指开合动作,无需复杂神经重定向手术,为双向仿生假肢提供了微创化创新方案。
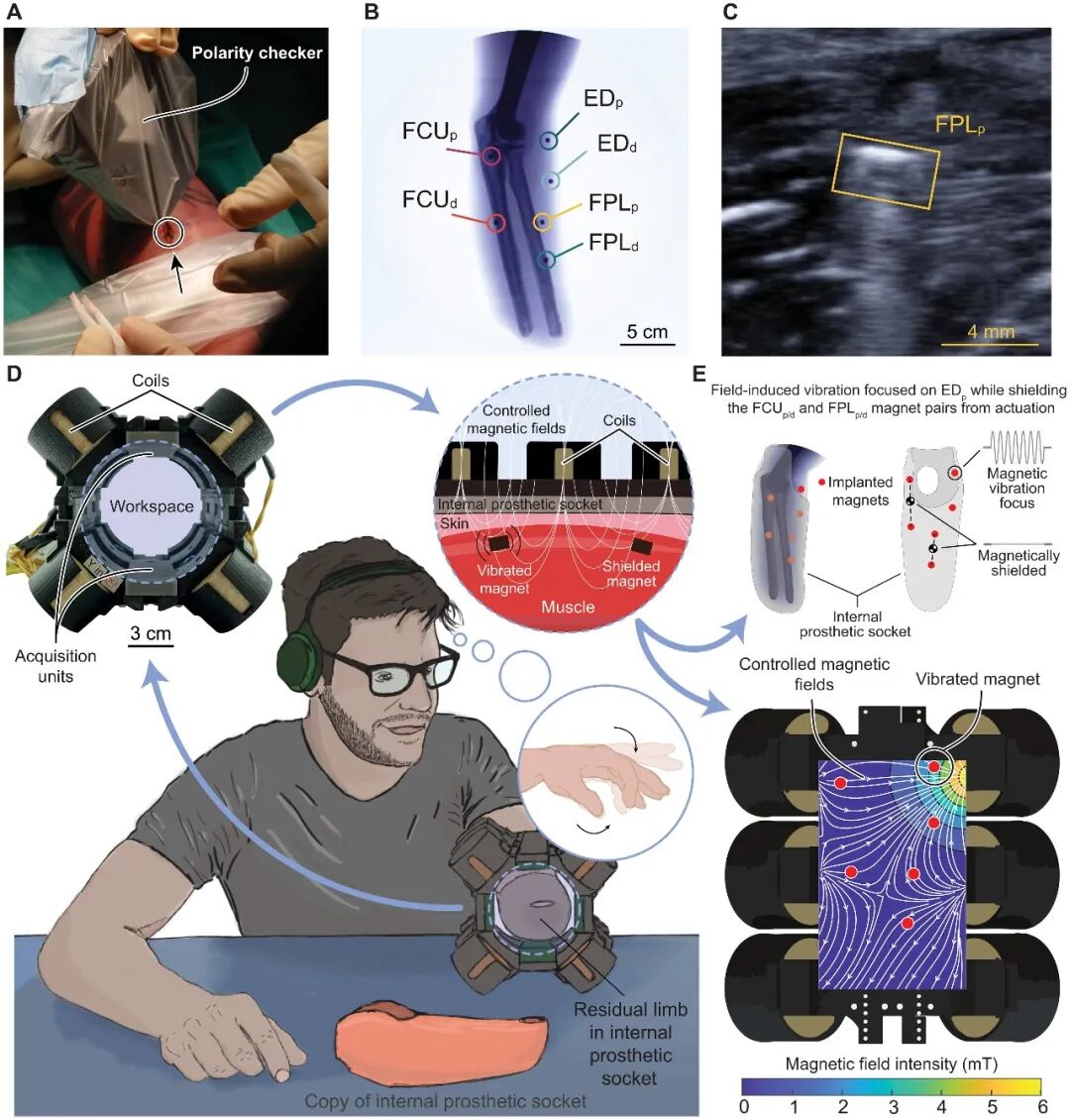
一种用于为动觉假肢提供手部运动感知的磁控系统。
(A)磁铁植入手术流程。植入过程中使用极性检测仪监测磁铁朝向。
(B)植入术后前臂X光影像。六枚磁铁成对植入三块肌肉内:尺侧腕屈肌(FCU)、指伸肌(ED)及拇长屈肌(FPL)。
(C)磁场诱发振动状态下拇长屈肌部位磁铁的超声成像。
(D)MKkI设备的控制配置:通过线圈系统输出局部远程振动。系统通过调节线圈电流生成可控磁场,磁场强度集中作用于目标磁铁以产生振动,其余磁铁中心点处磁场强度降至零,避免其受磁场作用发生位移。图中附上假肢接受腔内部轮廓,作为受试者描述感知位置的视觉参照。
(E)实验装置:受试者MKk-P1将残肢伸入磁驱动系统。振动刺激施加完毕后,受试者描述自身感受到的触觉,并在假肢接受腔复刻图上指出感知出现的位置。其余全部实验数据由研究人员人工记录。
完整图示说明参见原论文。©作者团队/Sci. Adv.
直面传统假肢感知反馈的困境
传统假肢感知反馈方案各有难以规避的短板。皮肤振动、电触觉刺激等无创手段仅能传递粗略触感,脱离实验室环境后实用性大幅下降;靶向神经重定向(TMRk)技术虽能还原精细抓握体感,却需要创伤极大的神经改道重建手术,适用人群受限;肌成形术、肌腱外置等早期方案手术复杂、术后疼痛与美观问题突出。
肌动动觉接口(MKkI)作为微创人机接口,继承了此前肌动磁控假肢的硬件基础,在植入永磁体读取运动指令的同时,利用外部电磁线圈反向驱动磁体产生局部振动,产生接近人类自然生动的本体运动觉反馈;整套植入操作创伤远低于神经重建类方案,大幅降低临床应用门槛。试验招募一名34岁创伤性前臂截肢男性受试者进行了为期六周的测试,受试者能够感知到手部开合等连贯协调动作,感知效果与真实手部活动高度近似。
该研究第一作者费德里科·马西耶罗(Federico Masiero)博士表示:“肌动动觉接口的独特之处在于,依靠微创小型植入物刺激肌肉,全程无需接触皮肤。这项技术不仅能帮助我们更深入地理解人体运动控制机制,也为截肢患者重建运动感知提供了核心突破口。”马西耶罗博士曾是圣安娜高等研究院博士生,目前任职于慕尼黑工业大学慕尼黑机器人与人工智能研究所,担任博士后研究员。
▲研究概览。©作者团队/Sci. Adv.
肌动动觉接口实现天然肢体反馈
刺激参数设计
研究团队在受试者尺侧腕屈肌、指伸肌、拇长屈肌三组肌肉内成对植入6枚生物相容聚对二甲苯涂层N52钕铁硼圆柱磁体,借助超声确认磁体可被磁场稳定驱动。外部设备由三层环形电磁线圈与磁场采集单元构成,系统可精准计算驱动电流,将扭转振动精准聚焦至目标磁体,同时抵消其余磁体周围磁场避免干扰,振动频率覆盖1至130Hz,扭矩振幅区间2至95μNm,完整覆盖诱发本体感觉的刺激参数范围,整套设备可适配残肢假肢接受腔,操作流程简洁直观。
单肌肉刺激感知到全手指张开/闭合
试验中研究人员随机对不同植入磁体施加正弦、方波振动刺激,受试者在完全不熟悉磁振动体感的前提下,产生的感知结果完全颠覆团队初始预期。研究人员原本认为单块肌肉振动会对应单根手指运动,但受试者全部感知均为全手指协同张开或闭合,不存在单指独立运动的体感,且所有动作都符合人体生理活动范围,不会出现健全人肌腱振动实验中那种违背骨骼结构的虚幻手部姿态。
在无引导的自由探索阶段,受试者累计报告37次清晰手部运动感知,其中手部张开感知出现频次更高,仅尺侧腕屈肌远端磁体可同时诱发开合两种体感,最易触发体感的平均扭矩为44.54μNm,最优刺激频率集中在90Hz。
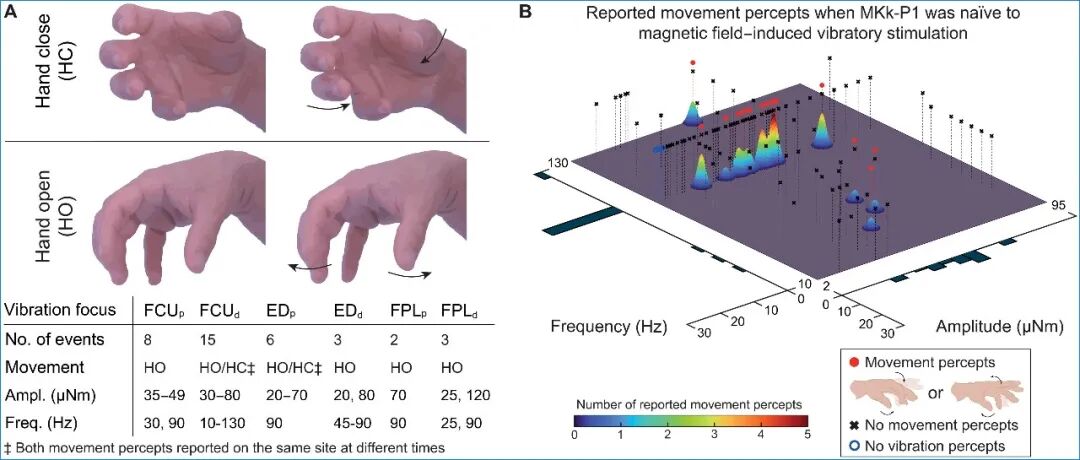
磁场诱发的肌肉振动会产生协调手指运动的知觉。
(A)上图:MKk-P1受试者由振动诱发手部运动知觉的实拍图,上图为手部握拳动作、下图为手部张开动作,受试者以完好手完成演示。下表汇总全部实验中观测到的所有手部运动知觉现象,同时记录诱发该知觉所采用的振幅与频率参数。
(B)MKk-P1初次接触磁场振动刺激时,研究者针对运动觉感知开展的参数探索空间;该空间由归一化高斯核线性叠加绘制而成,高斯核中心对应可诱发手部运动知觉的振幅、频率组合,以红点标注。探索测试中能产生感知但未诱发手部运动知觉的测试点标记为黑色叉号;无法感知到振动的测试点标记为蓝色圆圈。文中同步通过对应直方图展示运动感知事件随振动频率、位移量变化的分布规律。针对90赫兹振动条件,可诱发运动知觉的平均扭矩振幅为44.54μNm。
完整图示说明参见原论文。©作者团队/Sci. Adv.
感知灵敏度与最优体感诱发区间
团队通过心理物理学实验量化受试者感知灵敏度,测试最低可感知振动脉冲时长,结果显示受试者仅需单个振动周期即可察觉刺激,最多4个周期、约40毫秒就能稳定识别振动信号,本体感知响应速度接近天然肢体反馈。团队进一步测试5至130Hz全频段振动带来的体感鲜活度,所有植入位点感知峰值平均频率为82.5Hz,落在70至115Hz这一公认的振动诱发本体感觉最优区间;1至10Hz低频振动几乎无法被察觉,该规律与过往TMRk受试者、啮齿动物神经电生理实验数据高度吻合,佐证MKkI激活的是真实肌肉本体感受器,而非单纯皮肤触觉刺激。
与TMRk技术的感知体验相近
为厘清MKkI体感机制的普适性,研究团队将本次受试者手部运动感知动力学数据,与过往两项TMRk神经重定向试验受试者数据横向对比,借助视觉动作捕捉、数据手套分别提取两类受试者感知手部动作的关节角度、运动速度曲线。
对比结果显示,两类完全不同的感知接口诱发的虚幻手部姿态高度相似,感知动作主要集中在掌指、近端指间关节,远端指间关节活动幅度极小;拇指、食指、中指关节运动速度存在显著正相关,相关系数最高达0.62。即便受试者从未接受统一训练,两种技术带来的协同开合体感趋于一致,证明人体大脑对手部运动的本体表征统一基于抓握协同模式,和刺激实现方式无关。

不同运动神经-机器接口受试人群中振动诱发手部形态与动作的对比。完整图示说明参见原论文。©作者团队/Sci. Adv.
本体感觉新假说与应用前景
这项研究提出了颠覆传统认知的本体感觉理论:人体手部运动感知并非对应独立单关节、单手指信号,而是以抓握、张开这类先天运动协同单元为基础编码。过往学界普遍认为肌梭拉伸信号主导本体感知,但本次实验中半数肌肉位点振动产生与肌肉拉伸预期相反的体感,结合TMRk、神经电刺激相关研究结论,团队提出全新假说——本体感觉核心来源于肌肉收缩信号,而非肌肉延展。截肢后肌肉与神经通路断开,天然协同感知通路被屏蔽,MKkI通过深部肌肉磁振动绕过皮肤触觉干扰,单独剥离纯粹本体感知,得以直观展现大脑内置的运动协同模板。
尽管受试者能稳定感知手部开合,但其难以清晰描述体感细节,需要长达10秒振动刺激才能完整分辨运动错觉,振动停止后也很难察觉感知消失。这种难以言说的模糊感知特性,恰恰成为MKkI临床应用的独特优势:受试者主观上难以清晰分辨人工反馈,但客观运动操作数据显著提升,本体感知在潜意识层面参与运动调控,不会带来额外认知负担。对比需要刻意解读反馈信号的触觉刺激,这套磁体感接口可实现感知与动作无意识融合,大幅降低假肢日常使用的学习成本,适配长期居家、劳作等真实生活场景。
研究展望:开发永久性植入设备
相较于需要神经重建手术的TMRk,MKkI仅需植入微型磁体,手术创伤、术后恢复周期大幅缩减,同时整合运动控制与感知反馈双功能。团队下一阶段研究目标是利用现有技术读取植入磁铁位置信息以操控假肢,同时向磁铁叠加振动信号,同步还原自然肢体感知。长期规划是开发可长期留存体内的永久性植入装置。本次研究及双方此前的合作成果,为手部截肢患者同时实现自然抓握感知、直观运动控制奠定基础,或将大幅提升新一代仿生假肢的功能性。
MKkI研发者、本次研究统筹负责人克里斯蒂安·奇普里亚尼(Christian Cipriani)教授解释道:“我们当前的设备仅作为初代验证样机,植入物设计使用周期为六周。这段时长足以初步验证该接口的实用性与有效性。实验结果前景可观,因此我们计划开发永久性植入方案,以便开展更长周期、更大受试样本量的长期研究。”
这套磁植入式肌动动觉接口跳出了“单独刺激单指产生分立感知”的传统研发思路,从大脑运动协同编码底层逻辑出发重建假肢本体反馈,证明无需侵入式神经手术,就能恢复截肢者连贯、自然的手部运动觉。随着微创仿生感知技术持续迭代,MKkI有望打破高端感知假肢手术门槛高、普及困难的现状,帮助大量前臂截肢人群重拾流畅、自然的双手操控能力,为康复医学、人机融合领域提供低成本、高适配的全新技术方案。
论文信息
标题:Coordinated hand movement sensation revealed through an implanted magnetic prosthetic kinesthetic interface
期刊:Science Advances
发表日期:2026/6/24
DOI:https://doi.org/10.1126/sciadv.adx5046
作者团队:见下图
声明
1.本文内容、图片来自原论文及网络,详情可参考相关链接,如有侵权请告知删除。2.本公众号分享的医疗资讯仅供参考,不应被视为医疗建议。在做出任何与健康相关的决定或治疗计划之前,务必咨询合格的医疗专业人员。
了解更多脑机接口行业资讯
扫码加入“脑机接口”知识星球