小龙虾“OpenClaw”的火热出圈,为用户提供了一个可扩展的任务编排框架:通过Skill系统将复杂任务拆解、合理分配并闭环推进,打破了人工智能(artificial intelligence,AI)Agent从聊天对话迈向物理执行的屏障。2026年,物理智能落地已成为行业共识和热议焦点,AI正从实验室深入消费服务与高危工业等真实场景,重塑真实的物理世界。望向深空,当AI技术遇上遥远的红色星球,一场深空探测的革命正在悄然发生……
在深空探测任务中,探测器面临探测距离远、环境未知、通信延迟大等多重挑战。以火星为例,地火单向通信存在最长3~22 min延迟,这一物理限制使得传统依赖地球发送指令的遥控操作模式严重制约了探测效率。如何尽可能降低地面的介入,实现探测器的自主任务规划与执行,是深空探测任务长期面临的关键问题。
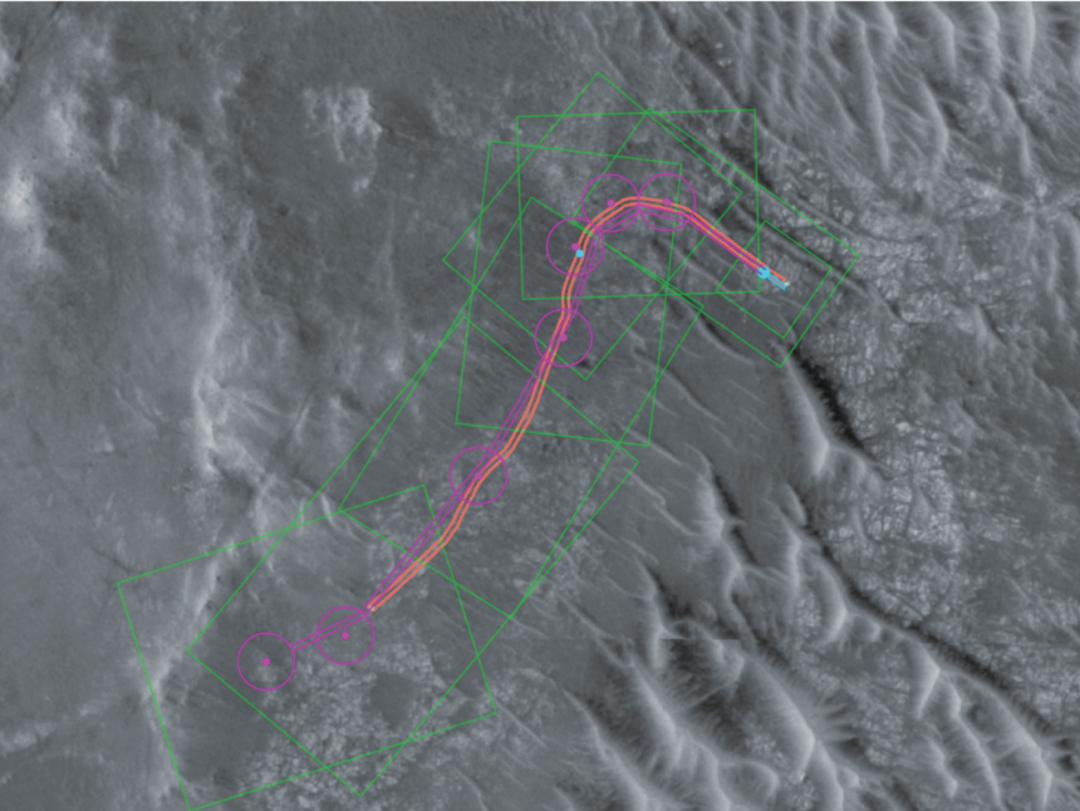
“毅力号”在火星杰泽罗陨石坑的实际行驶路线(橙)与AI规划路线(紫)
随着AI技术飞速发展,对于规则明确的任务场景,AI能够基于领域知识快速学习任务规则,显著提升任务规划效率。2025年12月,美国国家航空航天局(NASA)在“毅力号”火星车路径规划中引入Anthropic公司Claude视觉语言模型(VLM),成功完成地面全局规划,按照AI生成的路线成功行驶了246 m。这次技术验证首次将AI用于火星车路径规划,为未来深空探测任务规划提供了新的范式。
1 路径规划技术由人工驾驶走向自动驾驶
传统的任务规划模式依赖于地面规划结果。以火星车路径规划为例,地面根据卫星高清影像和火星车局部环境感知图像数据进行路径规划,人工制定避障路线并生成火星车可执行指令,利用每日有限的通信窗口上注,火星车严格按照“人工驾驶”的指令移动。过去由于器载计算能力限制,火星车本体智能化程度低,不具备自主路径规划能力,单日行驶距离受限于局部感知范围和地面规划效率。根据NASA索杰纳火星车工程负责人Matijevic在《Science》上的报道,“索杰纳号”火星车在生存的83个火星日内平均每日行驶2~3 m,移动效率较低。
随着火星车智能化提升,自主导航技术开始应用于路径规划任务,衍生出“人工全局规划+器上自主导航”的半自主式任务规划方法。地面依据卫星影像给出全局规划结果,制定火星车的航迹线,间隔一定距离设置关键航路点,引导火星车按照航路点行进。在航路点之间,火星车依托自主导航算法规划局部路径,自主识别障碍并生成可执行指令,实现了动态复杂环境下的自动驾驶。NASA旗下的喷气推进实验室(Jet Propulsion Laboratory,JPL)首席工程师Vandi Verma在IEEE航空航天会议中指出,计算、感知与移动并行处理的自主导航技术是实现“思考中驾驶”的关键。相较于过去的人工路径规划,半自主式路径规划方法极大拓展了火星车单日行进距离。NASA/JPL火星车自主导航软件总架构师MW Maimone在《Science Robotics》中指出,依托于自主导航技术的“毅力号”,单日行驶最远距离可达347.7 m,单日行驶距离得到百倍提升,自动驾驶比例达到了90%。
然而,半自主的路径规划方式仍然需要地面飞控人员日常不间断的全局规划才能确保火星车每日行驶,因此半自主路径规划方法虽然有局部的自动驾驶能力,但单日行驶里程依然受制于人工规划效率因素。
2 AI辅助路径规划的技术实践
2025年12月,“毅力号”火星车首次应用AI完成路径规划,AI使用与人类规划者相同的图像和数据生成航路点,替代了半自主式任务规划方法中人工完成的部分,实现了“AI全局规划+器上自主导航”全自主的路径规划。这为基于多重约束条件与复杂环境下的任务自主规划提供了一种全新的技术途径。NASA局长Jared Isaacman表示,这类自主技术能够助力探测任务运行更高效、应对复杂地形,并在探测器与地球距离不断增大时,提升科学探测回报。
AI辅助路径规划的核心是地球端的全局规划,这一过程可分为数据训练、路径生成、人工审核3个步骤。首先,将火星车安全行驶准则、地形处理规则、历史指令集等非结构化数据作为领域知识库,输入Claude模型完成场景学习。模型从海量信息中提取关键特征,区别安全与危险,辨识沙坑与岩石,评估可通行区域与禁行区域。其次,将火星高分辨率图像及高程数字模型(DEM)作为核心数据源送给Claude用于航路点优化,制定全局路径规划方案,生成可执行的指令序列。最后,通过人工审核对指令进行把关确认,并在“毅力号”的数字孪生系统中完成验证。
“AI全局规划+器上自主导航”全自主式任务规划方法相较于半自主式方法,能够实现人工规划效率的提升。AI路径规划将飞控操作人员由手动规划者转型为路径审核员,根据JPL工程师评估,在本次技术验证中,Claude模型将总的路径规划时间减少了1/2。随着未来探测任务复杂度提升,将面临多器并行规划的场景,借助全自主式规划才能够安排更多的探测任务,收集更多科学数据。
3 走向机器主导的未来应用
基于“AI全局规划+器上自主导航”全自主路径规划的技术验证,充分印证了全自主任务规划技术在未来深空探测极端动态未知环境场景下拥有广阔应用前景与重大工程价值。面对未来更复杂的探测需求,基于AI的全自主任务规划方法十分必要。
未来深空探测器将面临更复杂的任务场景,任务规划的工作量将随探测器规模扩大而成倍增加。中国地质科学院地质研究所侯增谦在《Nature Astronomy》中提到,中国天问三号任务将在火星表面通过机械臂、钻取装置、无人机收集多种形式的火星样品,涉及多机构、多器任务协作,任务复杂度和实施难度明显高于以往任务。针对未来火星探测,NASA还规划了火星低空无人机集群探测天坠(Skyfall)任务,6架无人机实施大范围侦察,相较“机智号”火星飞行任务,任务规划的工作量随任务规模增加显著增加。

NASA的火星“毅力号”探测器使用其机载前左避障相机拍摄了它前方的区域图像(图片来源:NASA)
NASA/JPL“毅力号”火星车AI自主驾驶负责人Masahiro Ono在《IEEE Transactions on Field Robotics》上指出,如果火星上的自动驾驶系统能拥有更强大的车载计算资源,其能力将实现更显著的提升。当前系统仍需地面AI生成、人工审核与指令上注,本质是AI辅助下的自主规划,还未实现将火星车原始数据作为规划输入,在轨直接给出工作规划序列的能力,即真正的端到端规划。随着未来探测器智能化水平的提高,“毅力号”的全自主路径规划模式可进一步优化。通过在太空部署高算力卫星平台,AI模型有望由地面迁移至近地轨道或行星轨道,探测器能够在地面弱干预条件下端到端制定任务规划方案,自主完成任务规划。端到端规划无需经过“数据回传-路径生成-指令上注”地面链路,是未来深空探测器长期自主生存的核心能力,能够显著缓解深空任务中通信带宽约束、任务执行效率、自主应急处置依赖地面决策等核心痛点。在不远的未来,如何提升全自主任务规划的可靠性与安全性或将成为新的科学问题。
在AI时代,航天工程师的角色正从繁琐的路径规划“执行者”转变为AI的“驾驭者”。AI技术将为人类探索宇宙提供更加自主、高效的技术支持,牵引深空探测任务实现范式跃迁,推动深空探测从“人工规划、机器执行”向“机器规划、自主决策”模式转变。
《科技导报》创刊于1980年,中国科协学术会刊,主要刊登科学前沿和技术热点领域突破性的研究成果、权威性的科学评论、引领性的高端综述,发表促进经济社会发展、完善科技管理、优化科研环境、培育科学文化、促进科技创新和科技成果转化的决策咨询建议。常设栏目有院士卷首语、科技新闻、科技评论、本刊专稿、特色专题、研究论文、政策建议、科技人文等。