文章来源:专利文件
随着科技的飞速发展,人形机器人正从科幻走进现实,在服务、工业、科研等领域扮演着越来越重要的角色。然而,如同人类一样,机器人的活动离不开灵活而稳健的关节。肩关节作为连接躯干和手臂的核心枢纽,其设计的优劣直接决定了机器人的运动能力、稳定性乃至使用寿命。 传统的人形机器人肩关节多采用轴承等刚性连接方式,这在执行精确指令时表现尚可,但当机器人遭遇摔倒、碰撞等意外时,刚性结构无法有效缓冲冲击力,极易导致关节损坏,从而显著降低机器人的可靠性和寿命。 针对这一行业痛点,深圳市长盈精密技术股份有限公司一项名为《肩关节结构及人形机器人》的专利(申请公布号 CN 120269607 A)提出了一种革命性的设计思路,巧妙地将“柔性缓冲”与“精密转动”融为一体,为打造更耐用、更可靠的人形机器人提供了全新的技术方案。 
01
技术背景:
为何肩关节如此重要?

02
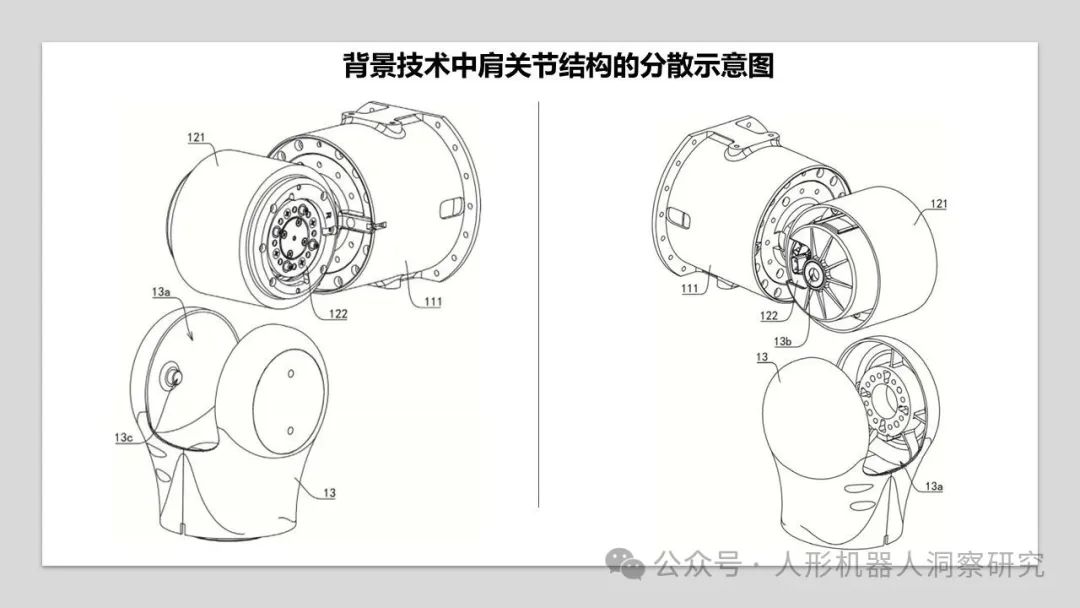
现有技术局限性
03
技术方案详述




04
核心技术特征与创新分析
应力分散:环套部(1411)与弹性支撑部(1412)之间通过倾斜的连接臂(1414)连接。连接臂的倾斜方向与弹性支撑部的倾斜方向互补,形成“V”形结构,该结构在受载时能有效分散应力,避免应力集中现象。 运动学约束:通过对三个滚珠环槽(1421, 1431, 1451)的截面弧线、相对位置进行精确的几何定义和约束(如权利要求8所述),确保了滚珠(144)在滚槽(14a)内被可靠地轴向限位,防止了滚珠的卡滞或脱出,保证了运动的稳定性。

05
技术优势评估
☞来源:人形机器人洞察研究☞责任编辑:游小秀☞审核人:张维官
☞广告合作: 孙哿 13811718902
声明:本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!
声明:本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!










