1、在真实机器人硬件和模拟环境中,通过远程操作收集具身行为数据;
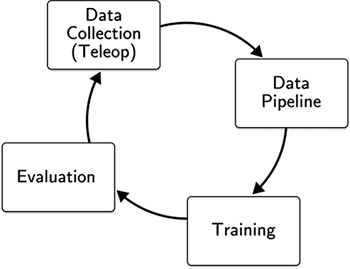
这些步骤循环构成一个持续的迭代过程,第4步的结果会指导相关决策,包括需要收集哪些额外数据,以及哪些网络架构或推理策略能带来性能提升。


LBM模型将由图像、本体感受和语言提示构成的输入信息,转化为以30Hz频率控制Atlas机器人全身的动作指令,研究人员利用扩散transformer结合流匹配损失来训练模型。
在实施这一过程中,波士顿动力团队遵循了三项核心原则。
最大化任务覆盖范围:将Atlas的模型预测控制器(MPC)与定制的基于虚拟现实(VR)界面相结合,能够覆盖从手指级精细操作到全身伸展与移动等各类任务需求。
训练多面手策略:采用多任务语言条件策略,在多种机器人形态上完成一系列多样化任务,共享策略改进以实现“涌现行为”的突破。
搭建支持快速迭代与严谨科研的基础设施:通过结合仿真、硬件测试以及为量产规模搭建的机器学习基础设施,得以高效探索数据和策略的设计空间,同时持续提升机器人的实际性能。

在展示的“Spot Workshop”任务演示中,机器人自主进行跨步、摆开姿势和下蹲以及灵巧操作,完成拾取、重新抓取、铰接、放置和滑动等操作,效率和动作都很流畅。

波士顿动力团队研究了数十项任务,既将其用于基准测试,也借此突破操作能力的边界。
在Atlas操作测试台(MTS)上,通过单一的语言条件策略,机器人能够完成从简单的拾取放置,到更复杂的任务,例如系绳子、翻转高脚凳、展开并铺好桌布,以及操作一个约10公斤的汽车轮胎。
绳子、布料和轮胎的操作属于典型案例,由于目标具有可变形的几何结构,且需要复杂的操作序列,用传统的机器人编程技术来完成这些任务极为困难。
但借助大型行为模型(LBMs),无论是堆叠刚性积木还是折叠软硬物体,训练过程都是相同的:只要人类能演示,机器人就能学习。
还有一个显著特点是:在推理阶段可以加快执行速度,而无需对训练过程做任何修改,这种策略会预测未来动作的轨迹以及执行这些动作的时间点,因此以通过调整时间来控制执行速度。

并且将策略速度提高1.5倍到2倍,也不会显著影响MTS和完整Atlas平台上的策略性能,在某些情况下,可以超越人类远程操作的速度极限。
测试所用的Atlas拥有50个自由度(DoF),可提供广泛的运动范围和高度的灵活性;Atlas MTS则拥有29个自由度,可用于探索纯操控任务。
波士顿动力采用远程操作的方式进行模型训练高质量数据的收集。
借助VR头显,操作员完全沉浸在机器人的工作空间中,并能获取与策略相同的信息,通过Atlas头戴式摄像头采集的画面经重新投影至用户视角,形成立体视图,增强了空间感知能力。

定制化的VR软件为远程操作员提供了丰富的指令界面,通过增强现实、控制器触觉反馈和平视显示元素,实时呈现机器人状态、控制目标、传感器读数、触觉反馈和系统状态,这使操作员能够充分利用机器人的硬件和能力,将自身的身体动作与感知同机器人同步起来。
该系统采用用户与机器人之间的一对一映射(即用户手部移动1厘米,机器人也会相应移动1厘米),这带来了直观的操控体验,尤其适用于双手协作任务。
这种神经网络策略与远程操作系统使用相同的机器人控制接口,使得之前开发的模型架构(针对不涉及移动的策略)能够轻松复用,只需对动作表征稍作扩展即可。

此外,仿真堆栈能精准复现硬件和机器人上的软件堆栈,因此无论是仿真平台还是硬件平台,都能共享数据处理流程、可视化工具、训练代码、虚拟现实软件及相关接口。
除了利用仿真技术对策略和架构选择进行基准测试外,波士顿动力还将仿真结果作为重要的协同训练数据来源,用于训练部署在实体硬件上的多任务、多形态机器人策略。

波士顿动力作为全球顶尖的机器人研发公司之一,其商业化历程因技术路线与市场需求的错位,导致成立30年来经历了三次重大股权变更,被多次卖身,从技术先锋变成了资本博弈的牺牲品,相比较如今的竞争对手,商业化落地进步也相对滞后。
2020年,韩国现代汽车出资9.21亿美元控股80%把波士顿动力收入麾下,旨在将其机器人技术应用于汽车制造(如焊接检测、物料搬运)和物流场景,现代接手后,波士顿动力也放弃了液压驱动的Atlas,转向开发电动版机器人以降低成本,并推出专为仓储设计的Stretch机器人等。

然而,挑战依然存在:电动版Atlas尚未量产,但人形机器人赛道竞争已然十分激烈,现代集团能否持续投入资金支持其长期研发结束其“卖身”循环仍是未知数。
黑科技炫技视频如今很难再吸引投资,明确的商业化路径和回报成为市场新的考量指标。
波士顿动力踩过的坑也为行业敲响警钟:机器人商业化需要技术、场景和资本的长期共振,而非单纯的技术秀和资本炒作。
-END-