
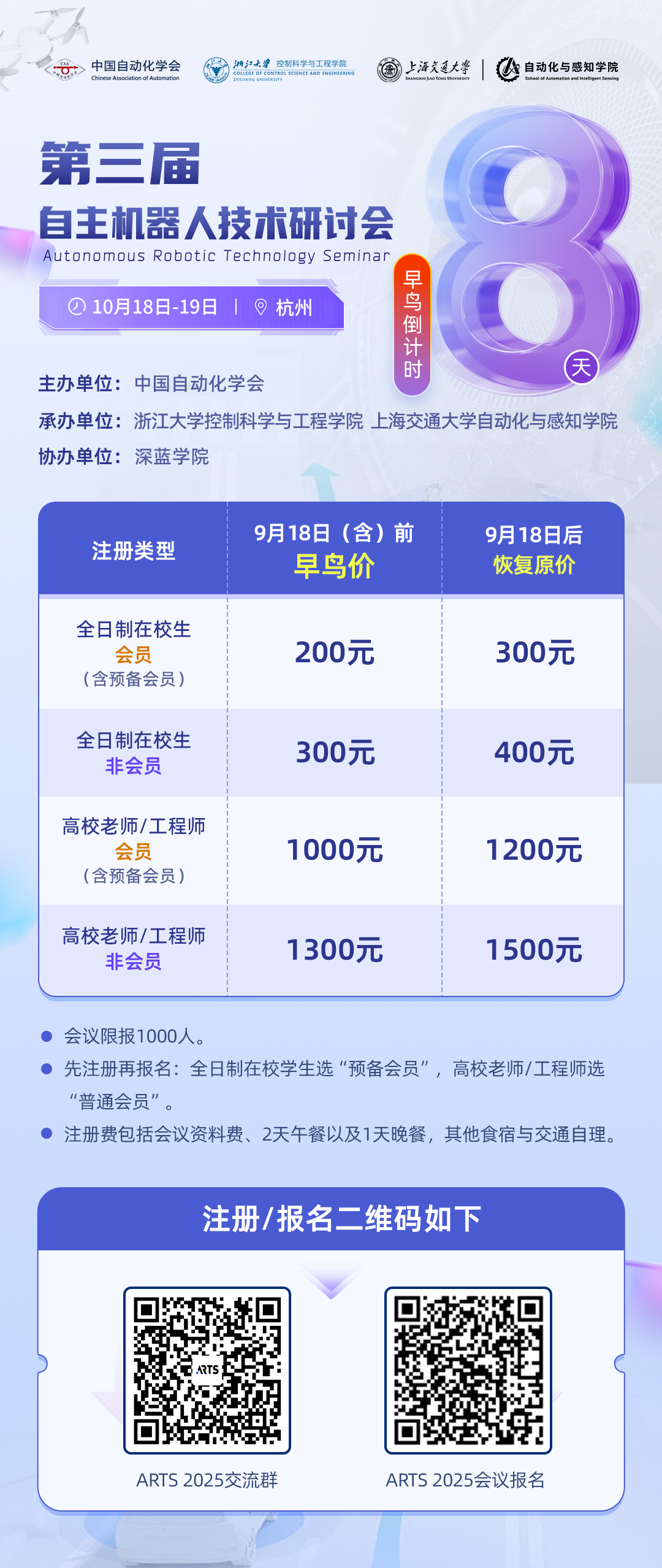
第三届自主机器人技术研讨会(ARTS)将于2025年10月18日至19日在杭州举行,会议规模预计1000余人。本次会议由中国自动化学会主办,浙江大学控制科学与工程学院、上海交通大学自动化与感知学院承办,深蓝学院协办。
ARTS倡导理性批判、敢于质疑、务实的科学精神,积极探索自由平等的思想交锋。ARTS主要关注传感与感知、自主导航、状态估计、移动机器人定位建图、运动规划、建模与控制、多机器人系统、具身智能、医疗仿生等方向。
ARTS 2025为大家准备了5场由各领域专家带来的主旨报告,4场技术论坛(24位特邀嘉宾技术报告),学术辩论、“高手云集”的奖学金答辩、学术吐槽大会、顶会顶刊分享等。
目前会议注册通道已经开放。
早鸟票9月18日截止!时间紧迫,抓紧报名!



注:报告嘉宾按姓名首字母排序,排名不分先后

嘉宾简介&报告详情
注:报告嘉宾按姓名首字母排序,排名不分先后

个人简介:
报告主题:
报告摘要:
随着神经表征技术的迅速发展,其在三维建模、环境感知与智能规划中的应用正不断拓展,成为机器人与计算机视觉等领域的研究前沿。本报告将介绍课题组在基于神经表征的三维环境感知与运动规划方面的最新进展。首先,将重点介绍面向多模态传感器输入的神经同步定位与建图(Neural SLAM)方法,通过先进的三维神经表征与基于学习的多源信息融合技术,有效提升智能体在复杂环境中的实时定位与稠密建图能力;随后,将探讨结合神经表征与物理规律的自监督运动规划学习方法,以增强机器人在动态环境中的多自由度规划与决策能力。

个人简介:
浙江大学杭州国际科创中心求是科创学者、“科创百人计划”研究员,研究方向为农业机器人环境感知、场景建模与自主导航。2020年6月,博士毕业于南开大学机器人所,长期致力于机器人定位与感知技术。2020年7月至2021年7月,任华为车BU高级算法工程师,负责量产车静态环境感知及自主代客泊车算法研发。2021年7月至2025年2月,任之江实验室无人车定位与建图组负责人,获年度优秀员工。主持国自然基金和求是科创学者人才项目,核心参与国家重点研发计划、工信部高质量发展专项以及国自然面上项目。研究成果发表于IEEE-TRO,IEEE T-IE, IEEE T-ASE,IEEE-TVT,IEEE-TIM,IEEE-TCSVT等期刊,以及NeurIPS、IEEE ICRA/IROS等会议,获最佳论文奖3项。申请中国发明专利20余项(授权15项),以及PCT国际专利2件。并于2025年1月获IEEE IMS “2024杰出审稿人”,并担任《BIROB》青年编委。
报告主题:
报告摘要:
“Less is More”的核心理念为构建高效、可扩展的自主移动机器人提供了关键路径。传统方法往往依赖于稠密且占用内存的原始点云或细节丰富的栅格地图,存在“存储大”、“更新慢”、“计算重”等痛点,而通过抽象化手段,将复杂传感数据转化为轻量级高层特征,如有向端点特征以及矢量化多边形地图等,可实现“以简驭繁”。多场景实验表明,轻量级高层表征不仅降低了存储与计算负荷,更在相似、动态及大尺度环境中保持了精准性和可靠性,为资源受限平台的长期部署提供了可行范式。这种“信息蒸馏”策略不仅提升了可靠性,也为多机器人协同、资源受限平台及大规模部署奠定了坚实基础。

个人简介:
刘畅,北京大学先进制造与机器人学院助理教授、研究员,入选国家海外高层次青年人才、北京市科技新星。本科毕业于北京大学,博士毕业于加州大学伯克利分校,博士后就职于康奈尔大学,曾任职于美国福特汽车公司和英伟达公司,从事自动驾驶研发工作。研究方向为机器人具身导航与集群协同规划控制,发表高水平论文40余篇,获IEEE TIV最佳论文奖、ICCAS最佳学生论文奖、ISRR Blue Sky Award、RSS 2025 MRS workshop最佳论文奖提名等奖励。多次担任国际机器人顶会RSS领域主席、IROS副编委等职务。
报告主题:
报告摘要:
运动规划是智能机器人系统的核心能力之一,传统方法主要依赖于环境几何信息来生成安全高效的运动轨迹。然而,在面对复杂动态的未知环境时,这一经典范式面临着显著的技术瓶颈。随着人工智能技术的快速发展,运动规划的能力边界在多个维度得到了实质性拓展。本报告将系统阐述当前人工智能技术的发展在三个关键方向对运动规划的赋能和革新:1)语义环境感知与理解;2)机器人-环境动态交互;3)多机器人协同规划。

个人简介:
报告主题:
复杂受限空间内机器人的运动规划及操作技能学习
报告摘要:
机器人在非结构化狭小空间内的规划与操作面临着场景感知精密性、运动规划高效性、操作技能灵巧性等方面的重要挑战。报告围绕复杂受限空间内的机器人运动规划与操作技能学习问题,从复杂三维场景重构、狭窄空间内运动规划及基于可供性的模仿学习等方向介绍相关工作。探讨基于具有光滑表面几何基元的环境高精度拟合、无碰撞可行区域的解析表达形式、狭窄通道内的高效运动规划方法。进而,通过物理仿真引导机器人想象未见物品的操作可供性,并运用李群、概率论、模仿学习等技术提出类人技能学习及迁移方法。结合前期研究基础,拟进一步研究人在环中的机器人操作技能自主学习方法,从而提升对动态场景的适应能力及复杂操作技能的泛化性。

个人简介:
报告主题:
Sampling-based Robot Path Planning and Its Applications
报告摘要:
Sampling-based path planning algorithms have achieved great success in robotics due to their ability to efficiently search the state space. In this talk, basic sampling-based algorithms and their strengths and weaknesses are introduced at first. Next, the adaptive sampling strategies and real-time optimization techniques are presented to overcome existing limitations of sampling-based algorithms. Then, AI-driven path planning algorithms are introduced, which lead to more efficient sampling strategies. Finally, a series of specific applications demonstrate the effectiveness and efficiency of the sampling-based path planning algorithms.

个人简介:
报告主题:
Curb Following of Autonomous Vehicles
报告摘要:
Curb following is a critical capability for autonomous road sweeping vehicles, yet existing methods face two major challenges: unreliable curb detection and inefficient motion generation. The wide variability in curb geometry and interference from roadside elements such as vegetation and infrastructure often result in detection failures. Meanwhile, conventional tracking-focused motion planners neglect task efficiency, resulting in unnecessary operational delays. To address these challenges, we propose Curb-Tracker, an integrated curb-following system for autonomous vehicles in complex road environments. The system comprises: (1) a robust curb detection algorithm based on a $2.5$D elevation map with online parameter adaptation, enabling reliable curb extraction across diverse scenarios; and (2) a task-optimized motion generation module utilizing Model Predictive Contouring Control (MPCC) to maintain a desired lateral offset from the curb while maximizing travel efficiency. Curb-Tracker has been deployed on two robotic platforms and extensively validated across various road types in two campuses. Experimental results demonstrate the system’s robustness, adaptability, and operational efficiency in diverse curb-following scenarios.
(最终排序以会议会刊内容为准)

中国自动化学会会员注册链接: https://www.caa.org.cn/Content/10.html ARTS 2025会议注册链接: https://www.cacpaper.com/register/142/user/preRegist
全日制在校生参会时,需带学生证,便于现场确认。
了解线下会议详情
请扫码加入【ARTS 2025 交流群】
会议举行一周前(10月11日23:59前)可申请退费;会议举行一周内(10月12日00:00后)申请退费或未参加会议不予退款。
如需退费,请联系会议组成员并发送姓名、手机号码、注册时间、退款原因等信息到会务组邮箱:liyuanyuan@shenlanxueyuan.com。
此外,若因注册信息填写错误等情况而需重新缴费,请联系会议工作人员,电话同微信:19016985878。
注:退费申请审核通过后,开具的电子发票将作废,请勿使用。退费将在会后开始办理。
联系电话:19016985878(同微信)
联系邮箱:liyuanyuan@shenlanxueyuan.com
联系邮箱:caa@ia.ac.cn










