ARTS 2025
为了促进自主机器人领域一线青年学者/工程师的交流,推动学术界与企业界的交融与产学研合作,搭建一个深度、纯粹的技术交流平台,中国自动化学会决定主办自主机器人技术研讨会(Autonomous Robotic Technology Seminar,简称ARTS)。
ARTS倡导理性批判、敢于质疑、务实的科学精神,积极探索自由平等的思想交锋。ARTS主要关注传感与感知、自主导航、状态估计、移动机器人定位建图、运动规划、建模与控制、多机器人系统、具身智能、医疗仿生等方向。
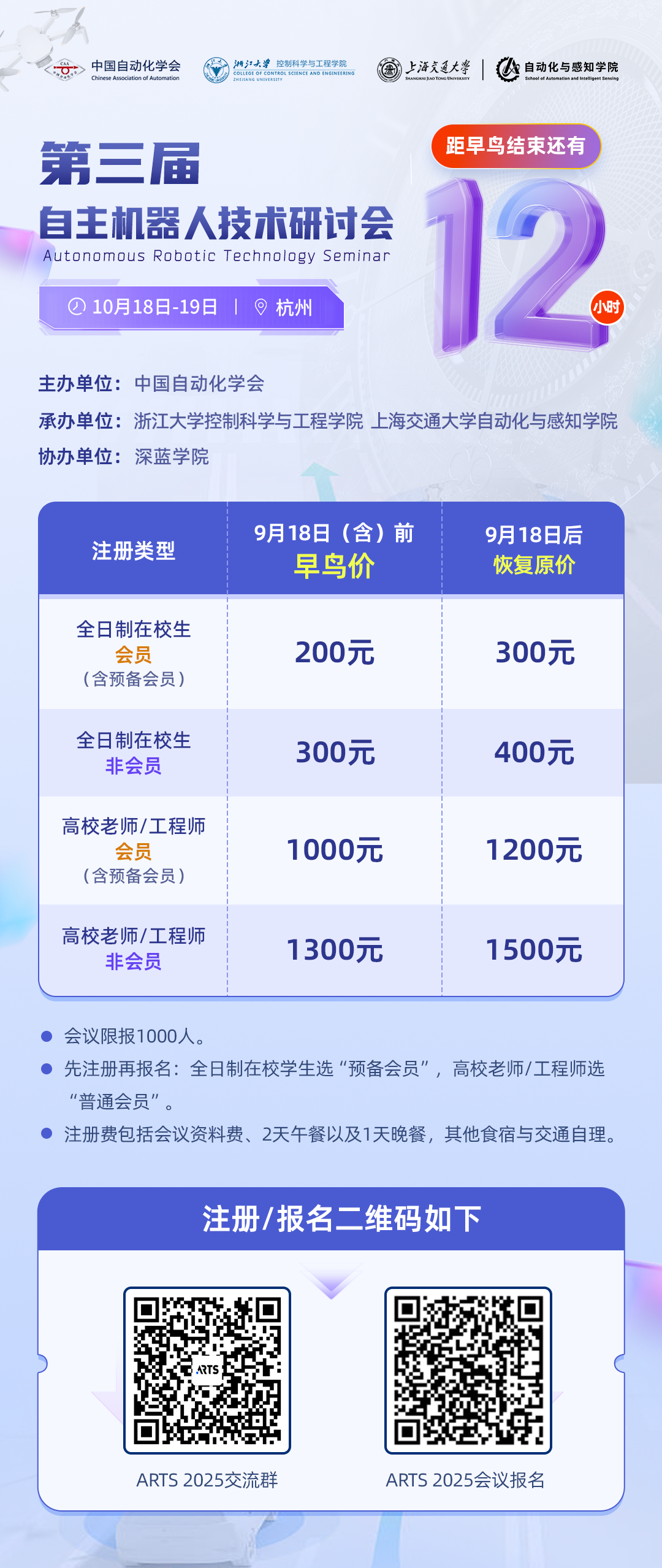
第三届ARTS大会将于2025年10月18日-19日在浙江大学玉泉校区举办。诚挚邀请您参加,并对大会的组织提供意见和建议!
组织机构
ARTS
主办单位:中国自动化学会
承办单位:浙江大学控制科学与工程学院、上海交通大学自动化与感知学院
协办单位:深蓝学院
组委会人员
ARTS
大会主席:
张楠 中国自动化学会
刘哲 上海交通大学
王越 浙江大学
无人驾驶与移动机器人论坛主席:
赵行 清华大学
李昊昂 香港科技大学(广州)
具身智能与大模型论坛主席:
苏航 清华大学
董豪 北京大学
医疗-仿生机器人论坛主席:
陆豪健 浙江大学
陆波 苏州大学
规划控制与多机器人论坛主席:
迟文政 苏州大学
周博宇 南方科技大学
学术辩论主席:
高飞 浙江大学
曹风魁 中国科学院沈阳自动化研究所
学术吐槽大会主席:
许华哲 清华大学
李亮 浙江大学
史桀绮 南京大学(苏州)
顶会顶刊宣讲主席:
周易 湖南大学
石凡 新加坡国立大学
学生奖学金/企业基金主席:
秦通 上海交通大学
吴荩 北京科技大学
企业赞助主席:
王超群 山东大学
高海明 浙江大学
赵松 深蓝学院
宣传主席:
陈谢沅澧 国防科技大学
张雪涛 大连理工大学
会议日程
ARTS

嘉宾介绍
ARTS

Robotic Manipulation from Word Model Perspective
报告摘要:
A generalist robot should perform effectively across various environments. However, most existing approaches heavily rely on scaling action-annotated data to enhance their capabilities. Consequently, they are often limited to single physical specification and struggle to learn transferable knowledge across different embodiments and environments. To confront these limitations, we propose UniVLA, a new framework for learning cross-embodiment vision-language-action (VLA) policies. Our key innovation is to derive task-centric action representations from videos with a latent action model. This enables us to exploit extensive data across a wide spectrum of embodiments and perspectives. To mitigate the effect of task-irrelevant dynamics, we incorporate language instructions and establish a latent action model within the DINO feature space. Learned from internet-scale videos, the generalist policy can be deployed to various robots through efficient latent action decoding. We obtain state-of-the-art results across multiple manipulation and navigation benchmarks, as well as real-robot deployments. UniVLA achieves superior performance over OpenVLA with less than 1/20 of pretraining compute and 1/10 of downstream data. Continuous performance improvements are observed as heterogeneous data, even including human videos, are incorporated into the training pipeline. The results underscore UniVLA's potential to facilitate scalable and efficient robot policy learning.

柔性人工肌肉技术及其机器人应用
报告摘要:
驱动技术对于实现机器人所需的力和位移输出至关重要。高功率密度、高能量密度和服役稳定的驱动器一直是机器人系统中关键的组成部分,它们的发展也推动着新型机器人系统的涌现,包括新形态、新功能和新特性的实现。介电弹性体驱动器作为一种前沿驱动技术,在过去二十多年里取得了显著进展,展现出高应力、大行程、高柔性和强环境适应能力等优异特性。然而,它仍面临着多种挑战,尚未实现大规模应用。本报告将介绍我们在介电弹性体驱动器寿命保障、创新制备工艺以及机器人应用方面近年来取得的进展。结合其他类似原理的人工肌肉应用案例,我们将探讨柔性人工肌肉在各种尺度机器人系统中的应用形式和前景。同时,还将总结该技术发展中所面临的核心挑战和机遇。

报告主题:
兼顾高精度和高泛化性的灵巧手和灵巧操作
报告摘要:
机器人灵巧操作通过多指手动态建立与脱离接触来实现对于被抓取物体的精细操作。相较于基于学习的灵巧操作方法,基于模型的方法无需针对每项任务进行大量数据收集,提供了一种高效高精度的解决方案。然而,由于物理接触的复杂性,现有基于模型的方法在高效在线规划和处理建模误差方面面临挑战,限制了其实际应用。为解决现有方法的不足,本报告提出一种新型的层次化灵巧操作框架,通过运动-接触联合建模实现了动作与接触的协同优化。大量实验表明,所提出的方法能够兼顾灵巧操作的高精度和高泛化性。

生物混合磁驱微机器人
报告摘要:
“生物混合微机器人”是以生物细胞、生物材料和功能性物质有序互联集成,具备生物组织特性与机器人仿生感知、运动、决策能力的新概念机器人,在活体环境适应性与医用任务作业安全性方向性能优异,有望变革靶向给药、组织修复及活体采样等重大疾病诊疗技术。本报告重点介绍通过模拟细菌、水母等水生生物行为,将生物混合微机器人作为拥有理想生物学特性的软体执行器,研究了其高效运动、自主决策及多模态运动控制方法,并开展了活体封闭环境采样、运输、投递等应用探索,为癌症、血栓等疾病精准靶向治疗提供了新思路。

报告主题:
面向复杂恶劣环境的具身感知与操作
报告摘要:
由于制造业的转型发展,复杂恶劣环境下的人员替代具有极高的紧迫性和必要性。然而,在高温、高危等恶劣环境下的感知与操作面临一致性差、感知精度低、泛化性要求高的难题。本报告将主要面向港口和钢铁场景,在感知层面,介绍场景相关、小样本、 需求不一致的泛化感知方法。在操作层面,主要面向柔性绳索, 介绍防摇和模仿学习技术在无人起重机抓放的实际落地案例。最后,本报告也将进一步介绍大模型在工业场景中的初步应用,探讨大模型技术提升工业场景的动态适应能力,降低复制成本的落地实施可能性。

从语义定位建图到空间智能
报告摘要:
随着智能机器人在复杂动态环境中的广泛应用,定位与建图(SLAM)技术正经历着从传统几何驱动的模块化架构,向面向语义空间感知的端到端框架的演进。本报告聚焦于“如何让机器人在真实世界中实现稳定、可解释且可部署的定位与建图”,系统介绍课题组在语义 SLAM、全局鲁棒定位与动态环境建图方面的最新进展,包括四维实例感知语义分割、物体级语义定位与建图,以及端到端的鲁棒重定位,最后探讨 SLAM 面向空间智能发展的潜在路径与未来挑战。
除主旨报告外,大会特别设置了4场分论坛(按名称首字母排序),将带来24场丰富的特邀报告。

报告主题:
报告摘要:
让机器人实现更智能的类人的灵巧抓取是具身智能中的一个重要目标。在这一领域,我们探讨了将物体检测的思想引入到灵巧手抓取位姿点的定位,实现了基于语言引导和生成的符合人类意图的机器人高质量抓取,以及进一步利用物体可供性实现零样本泛化,赋予机器人对未见类别物体的语言引导灵巧抓取能力。此外,我们还将探讨一些有趣的应用。

卢宗青
报告主题:
报告摘要:
现有的 VLA 在处理需要高灵巧度的复杂操作任务时表现不佳,并且在新场景和新任务中的泛化能力有限,主要原因在于它们依赖的训练数据存在不足:要么是合成数据,存在显著的模拟到现实(sim-to-real)差距,要么是摇操数据,缺乏规模与多样性。为了解决这一数据瓶颈,我们提出利用人手作为基础操作器,充分挖掘互联网视频数据中蕴含的丰富灵巧性与可扩展性,并提出了Being-H0,一个基于大规模人类视频训练的灵巧视觉-语言-动作模型(Vision-Language-Action, VLA)。

报告主题:
报告摘要:
实现人类水平的灵巧操作是机器人学领域的长期目标。近年来, VLA模型为核心的具身智能技术虽已初步展现复杂操作的潜力,但根本性挑战仍然存在:大模型强大的语义泛化与推理能力,如何与灵巧操作所需的高维、动态、接触丰富的底层控制进行有效结合?
攻克这一挑战,亟需我们解决一系列关键难题:如何为高维运动空间设计能被大模型理解并生成的动作表示?如何突破高质量、大规模、多样化机器人交互数据的稀缺瓶颈?以及,如何设计模型架构,将从模仿学习中获取到的专家技能与大模型的通用知识先验深度融合,以应对严峻的泛化挑战?本报告将聚焦于此,探讨基于具身大模型,构建真正具备精细操作能力的通用机器人的可能路径。

梁小丹
报告主题:
Spatial Reasoning for VLA Foundation Models
报告摘要:
本报告聚焦视觉—语言动作大模型(VLA)在空间推理与物理理解方面的能力挑战与前沿进展。尽管现有模型在具身智能体的推理与规划中展现出潜力,但其对三维结构化环境中的物理现象和空间关系的理解仍存在显著局限。为系统评估此类能力,团队提出了多个新型基准测试,包括面向机器人积木组装任务的PhyBlock,构建多级认知层次任务;以及基于开放世界游戏环境的MineAnyBuild,通过生成可执行的建筑规划,评估模型在空间理解、推理、创造性与空间常识等核心维度的表现。当前先进模型在高层规划、空间方向判断和依赖关系推理中表现薄弱,且思维链提示改善有限,凸显出对物理直觉理解的深度依赖。同时,为提升机器人操作中的空间具身推理能力,提出了层次化的具身感知扩散模型A0,通过解耦高层空间功能推理与底层动作执行,在多种机器人平台上验证了其泛化效能与实物操作适用性。

报告主题:
报告摘要:
In an open-ended world, robots inevitably encounter tasks they have never seen before. A household robot may need to execute long-horizon tasks with novel combinations, or adapt to new human preferences and instructions. Such real-world scenarios present significant challenges and demand strong generalization capabilities before large-scale robot deployment. In this talk, I will discuss two key directions for enabling generalization in robots: (1) addressing the problem of data scarcity, and (2) enabling continual adaptation without relying on large amounts of expert data. First, I will discuss approaches for generating large-scale robot data in household environments, particularly for tasks requiring long-horizon mobile manipulation. Second, I will discuss how robots can continually adapt to unconstrained human preferences by acquiring new skills through reinforcement learning.

报告主题:
报告摘要:
本报告着重介绍地平线机器人实验室开发的面向具身智能领域的3套开源框架和基于这些框架研发的具身智能算法,包括:
RoboOrchard具身智能算法开发框架,覆盖包括数据管理,模型训练,仿真任务套件,机器人控制模块和部署的全流程。实现工业级,全功能,高易用性的特性,并搭载行业领先的高性能算法,大大加速了操作、导航等具身智能算法的开发。
HoloMotion 机器人全身运动控制算法开发框架,覆盖包括动作重定向、分布式强化学习训练、性能评估,以及部署的全流程。得益于模块化设计,HoloMotion为开发基于强化学习的人形机器人全身运控控制提供了使用和可拓展的基础。
EmbodiedGen 具身智能仿真资产生成框架,通过3D生成等技术自动化构建多样且可交互的3D仿真世界,以解决具身智能研究中面临的泛化性挑战。

报告主题:
报告摘要:
随着神经表征技术的迅速发展,其在三维建模、环境感知与智能规划中的应用正不断拓展,成为机器人与计算机视觉等领域的研究前沿。本报告将介绍课题组在基于神经表征的三维环境感知与运动规划方面的最新进展。首先,将重点介绍面向多模态传感器输入的神经同步定位与建图(Neural SLAM)方法,通过先进的三维神经表征与基于学习的多源信息融合技术,有效提升智能体在复杂环境中的实时定位与稠密建图能力;随后,将探讨结合神经表征与物理规律的自监督运动规划学习方法,以增强机器人在动态环境中的多自由度规划与决策能力。

报告主题:
Curb Following of Autonomous Vehicles
报告摘要:
Curb following is a critical capability for autonomous road sweeping vehicles, yet existing methods face two major challenges: unreliable curb detection and inefficient motion generation. The wide variability in curb geometry and interference from roadside elements such as vegetation and infrastructure often result in detection failures. Meanwhile, conventional tracking-focused motion planners neglect task efficiency, resulting in unnecessary operational delays. To address these challenges, we propose Curb-Tracker, an integrated curb-following system for autonomous vehicles in complex road environments. The system comprises: (1) a robust curb detection algorithm based on a $2.5$D elevation map with online parameter adaptation, enabling reliable curb extraction across diverse scenarios; and (2) a task-optimized motion generation module utilizing Model Predictive Contouring Control (MPCC) to maintain a desired lateral offset from the curb while maximizing travel efficiency. Curb-Tracker has been deployed on two robotic platforms and extensively validated across various road types in two campuses. Experimental results demonstrate the system’s robustness, adaptability, and operational efficiency in diverse curb-following scenarios.

报告主题:
报告摘要:
运动规划是智能机器人系统的核心能力之一,传统方法主要依赖于环境几何信息来生成安全高效的运动轨迹。然而,在面对复杂动态的未知环境时,这一经典范式面临着显著的技术瓶颈。随着人工智能技术的快速发展,运动规划的能力边界在多个维度得到了实质性拓展。本报告将系统阐述当前人工智能技术的发展在三个关键方向对运动规划的赋能和革新:1)语义环境感知与理解;2)机器人-环境动态交互;3)多机器人协同规划。

报告主题:
复杂受限空间内机器人的运动规划及操作技能学习
报告摘要:
机器人在非结构化狭小空间内的规划与操作面临着场景感知精密性、运动规划高效性、操作技能灵巧性等方面的重要挑战。报告围绕复杂受限空间内的机器人运动规划与操作技能学习问题,从复杂三维场景重构、狭窄空间内运动规划及基于可供性的模仿学习等方向介绍相关工作。探讨基于具有光滑表面几何基元的环境高精度拟合、无碰撞可行区域的解析表达形式、狭窄通道内的高效运动规划方法。进而,通过物理仿真引导机器人想象未见物品的操作可供性,并运用李群、概率论、模仿学习等技术提出类人技能学习及迁移方法。结合前期研究基础,拟进一步研究人在环中的机器人操作技能自主学习方法,从而提升对动态场景的适应能力及复杂操作技能的泛化性。

报告主题:
Sampling-based Robot Path Planning and Its Applications
报告摘要:
Sampling-based path planning algorithms have achieved great success in robotics due to their ability to efficiently search the state space. In this talk, basic sampling-based algorithms and their strengths and weaknesses are introduced at first. Next, the adaptive sampling strategies and real-time optimization techniques are presented to overcome existing limitations of sampling-based algorithms. Then, AI-driven path planning algorithms are introduced, which lead to more efficient sampling strategies. Finally, a series of specific applications demonstrate the effectiveness and efficiency of the sampling-based path planning algorithms.

报告主题:
报告摘要:
“Less is More”的核心理念为构建高效、可扩展的自主移动机器人提供了关键路径。传统方法往往依赖于稠密且占用内存的原始点云或细节丰富的栅格地图,存在“存储大”、“更新慢”、“计算重”等痛点,而通过抽象化手段,将复杂传感数据转化为轻量级高层特征,如有向端点特征以及矢量化多边形地图等,可实现“以简驭繁”。多场景实验表明,轻量级高层表征不仅降低了存储与计算负荷,更在相似、动态及大尺度环境中保持了精准性和可靠性,为资源受限平台的长期部署提供了可行范式。这种“信息蒸馏”策略不仅提升了可靠性,也为多机器人协同、资源受限平台及大规模部署奠定了坚实基础。

报告主题:
报告摘要:
传统无人机往往难以在丛林、楼宇及洞穴等典型导航拒止环境下进行正常作业,然而该环境下无人系统的搜索救援、侦察预警及目标捕捉等研究工作具有重要的军事和民用价值。报告聚焦无人系统复杂环境下的协同探测和目标追踪,从复杂环境下多无人系统定位的协同性、调度的高效性、轨迹的安全性及控制的鲁棒性角度出发,重点对多无人机协同定位技术、基于路图的多无人机协同决策调度技术、随机模型预测路径积分的多无人机实时运动规划技术、多变量干扰补偿的飞行控制技术及基于YOPO的无人机敏捷追踪技术进行介绍,在此基础上对未来研究工作进行展望。

报告主题:
报告摘要:
认知导航通过与环境持续交互实现学习和演进,是导航技术、认知科学、人工智能等前沿领域与应用场景深度交叉融合的导航新范式。本报告将探讨如何让机器人像人类一样,利用多模态信息进行空间感知与理解,并在此基础上通过与环境交互不断学习行为策略,从而实现更高层次的认知导航。报告内容将重点介绍认知导航的概念及内涵,分析空间感知与行为学习对实现认知导航的重要意义;介绍在空间感知与行为学习相关领域取得的研究进展;针对开放环境面临的新挑战,探讨未来发展趋势。

报告主题:
报告摘要:
近年来,个体车辆的环境感知能力显着提升。 然而,实际驾驶场景比现有数据集复杂得多,并且具有挑战性。 因此,仅仅依靠单一车辆的视角并不能满足全自动驾驶的基本需求。
与单车感知相比,车联网之间的协作有望带来更全面、更准确的环境感知。 本次报告我们将介绍多车辆、多视角、多信息源信息融合的研究进展。 此外,现实世界中的不确定因素,如恶劣的路况或极端天气,也会影响传感器采集数据的质量,导致感知算法的输出异常。因为我们提出一种基于改进BEV的融合框架,提升对远距离目标的感知精度。同时,我们进一步探索一种能够有效利用现有通信条件的融合框架,有效降低了通信带宽使用,并保证了感知性能。 此外,我们还实现了基于跨模态融合的模态灵活知识蒸馏,旨在提升现实世界利用多模态融合感知的泛化能力和训练效率,提高自动驾驶车辆应对现实环境变化的能力和可靠性。 还将讨论互联智能支持的合作感知的未来研究方向。

报告主题:
报告摘要:
模型预测控制(MPC)与强化学习(RL)在移动机器人决策与控制中的应用日益广泛。如何融合MPC的滚动时域优化机制与RL的闭环策略设计能力,是一个重要的研究问题。本报告以移动机器人为重点研究对象,重点介绍我们在学习型预测控制、控制论驱动的强化学习、多机器人可扩展策略学习等方面的理论与应用研究进展。

报告主题:
报告摘要:
在过去的几年中,随着传感器成本降低,激光雷达与相机已成为空间智能中最主流的传感器组合,基于二者在端侧融合的感知方案,已在各类任务中展现出巨大潜力。然而,要真正实现“1+1>1”的定位与重建效果,必须对二者的观测进行紧密耦合与高效利用,这对整个系统提出了极高挑战。本报告将重点探讨以下三个方面:其一,如何在实验场景中构建高效易用的激光视觉“标定间方案”;其二,如何维护一个统一地图以管理异构的激光与视觉测量;其三,如何在测量层面高效紧耦,使系统能够获得接近像素级的位姿精度。同时,我们将展示基于激光视觉融合的下游应用,包括机器人在极端退化场景下的自主导航、真彩色Mesh重建、3DGS、以及物体级语义地图重建。

报告主题:
报告摘要:
受限于机载感知与计算资源,无人机在复杂动态环境中的自主飞行与集群协同仍面临严峻挑战。传统感知-规划-控制架构易受模块间累积误差和系统延迟影响,难以支撑高速敏捷飞行;而基于模仿学习或强化学习的方法则常受限于专家数据获取困难与训练样本效率低下的问题。本次报告将介绍团队提出的基于可微分物理建模的端到端训练范式,通过将无人机动力学嵌入学习过程,显著提升样本效率并支持梯度引导的高效优化。基于该框架,我们发展了面向深度图与单目视觉的高速避障算法,首次实现了单目条件下的高机动自主飞行,并在无需真实数据微调的情况下,达成从仿真到真实环境的零样本迁移,为轻型无人机在复杂场景中的鲁棒自主飞行提供了高效、可扩展的新路径。

报告主题:
报告摘要:
鱼类经过漫长的自然进化,形成了卓越非凡的游动能力。仿生机器鱼以自然界鱼类为研究对象,旨在揭示鱼类高速、高机动及高效率游动的奥秘,为新型水下智能移动机器人系统的开发及应用,提供理论基础和技术支撑。本报告将重点介绍团队近年来在仿生机器鱼方面取得的研究进展,包括以鱼类、海豚等生物为仿生原型,所开展的运动机理分析、仿生系统设计、智能运动控制等内容,最后分析和展望未来的研究方向和发展前景。

报告主题:
报告摘要:
微型扑翼飞行机器人在复杂狭窄空间执行侦察作战、环境监测、勘探定位等任务场景具有重要价值。然而,现有微型扑翼飞行机器人存在尺寸大、升重比低、机动性差和智能化水平不足等问题,严重限制其应用。本次报告将介绍团队在昆虫飞行机理,仿昆虫微型扑翼机器人高效能结构设计、刚柔耦合多体动力学建模以及控制设计等方面的研究进展。

报告主题:
Embracing Intelligent Robotic Sonographer Colleagues: Opportunities in the Era of Robotics & AI
报告摘要:
医学超声在现代临床干预中具有至关重要的作用。由于其具备实时性、成本低廉以及无电离辐射等优势,超声成像已被广泛应用于生物测量与疾病诊断,尤其是针对人体内脏器官。然而,传统超声检查高度依赖操作者,即便是经验丰富的超声科医师,也很难在检查过程中精确保持或复现采集参数(例如探头与受检组织之间的接触力及相对方向)。操作者之间及同一操作者不同时间的操作差异,严重影响了诊断的准确性,从而限制了超声成像在临床中的全面推广与应用。为了提升诊断的一致性与准确性,我们设计了一种智能机器人超声系统,可实现自动化、精准且稳定的图像采集。

报告主题:
报告摘要:
人体腔道曲折复杂、空间受限,既是重大及多发疾病的发病位置,亦是实施诊断和治疗的必经之路。柔性手术机器人具有优良的环境顺应性和灵巧的作业能力,是人体腔道内作业的重要使能技术,在世界范围内得到广泛研究和应用。但是现有技术面对复杂腔道环境及手术任务的综合效能仍然非常有限,而且手术机器人未来必然朝向智能化的方向发展,为临床提供更精准和更加易于实施的手术方案。报告将对柔性手术机器人技术的发展现状进行概述,并介绍报告人在柔性手术机器人感知、导航和自主化方向的应用情况。

报告主题:
报告摘要:
在高风险手术场景中,医生与机器人系统之间的信任至关重要。本报告提出通过情境感知数字界面与共享自主性框架构建可信医疗机器人的方法。结合数字孪生驱动的混合现实、视-触觉融合、可解释 AI 及自适应情境感知共享控制等最新进展,我们的智能界面能够实时解析手术情境、动态适应变化并透明地传达决策过程。通过整合多模态传感、触觉反馈与 AI 感知,系统响应更直观可靠,从而提升医生信心与整体安全性。我们将通过机器人辅助显微手术、遥操作与半自主操控等案例,展示“人在回路”的自主性如何提高系统性能与信任度。

报告主题:
报告摘要:
本报告将阐述报告人在腹腔镜机器人手术上,从智能场景感知到手术任务自动化系统的研究。在手术场景理解层面,研究提出了基于关系图神经网络的机器人动作识别系统,融合视觉和运动学信息实现精确分类。进一步研发了动态手术场景重建技术,集成了深度估计、器械分割和三维重建算法。在人机交互增强方面,还将增强现实技术引入机器人手术,通过三维可视化和远端传输为本地新手医生提供来自远程专家的直观指导。最新研究基于团队开源手术具身智能模拟器SurRoL开发了手术任务的自动化范式,实现仿真到真实环境的零样本迁移,并成功集成到思腾手术机器人系统,在活体动物上实现多手术辅助任务的自动化,为下一代自主手术机器人的发展奠定了基础。
大会注册缴费
ARTS
中国自动化学会会员注册链接:
加入ARTS2024技术研讨会交流群/扫码注册:

联系电话:19016985878(同微信)
联系邮箱:liyuanyuan@shenlanxueyuan.com
联系邮箱:caa@ia.ac.cn










