近年来,无人机在农业、灾害管理及监视等领域展现出广泛应用潜力,其灵活性与数据采集能力为复杂任务提供了有效支持。然而,着陆环节仍是操作中的关键难点,据统计,超过47%的无人机事故发生于着陆阶段。在强风、不平坦地形或移动平台等复杂环境下,着陆难度进一步增加。

当前多数小型多旋翼无人机采用刚性起落架,需在水平面上以较低速度着陆,以避免弹跳或翻倒。在高速移动平台(如地面车辆)上着陆时,无人机常需保持较大俯仰角以抵抗空气阻力,而传统起落架设计难以适应此类姿态。相关研究表明,部分机型在特定条件下可实现最高约50公里/小时的移动着陆,但受限于结构和控制逻辑,成功率有限。
为提升着陆可靠性,部分研究引入磁性吸附机构或阻尼结构以增强着陆稳定性,并尝试通过提高下降速度以降低风扰与跟踪误差的影响。然而,在高速移动中着陆仍面临螺旋桨干涉、滑移及视觉跟踪失效等问题。
▍融合摩擦减震与反向推力,突破无人机高速着陆技术瓶颈
针对上述挑战,来自加拿大舍布鲁克大学的研究团队前不久提出了一种新型无人机起落架系统,该系统结合摩擦减震器与反推力技术,旨在实现小型多旋翼飞行器在高速移动平台上的可靠着陆。基于团队先前在倾斜表面着陆方面的工作,研究团队进一步扩展了无人机在动态环境下的着陆能力。
该起落架采用摩擦减震器以消散着陆时的动能,有效防止无人机在冲击过程中发生反弹;同时通过反推力机制增强脚部与着陆面之间的摩擦力,抑制滑移现象。这一策略使无人机能够以较高速度下降,并在接触前执行简化的俯仰调平操作,从而适应快速移动的着陆平台。
仿真与实验结果表明,该系统在垂直下降速度达3米/秒、平台移动速度高达100公里/小时的条件下,仍能维持80%以上的着陆成功率。相较于传统多旋翼无人机,该方法将着陆状态包络扩大了60倍,调平机动起始阶段的飞行包络扩大了38倍。在实际测试中,研究团队实现了无人机在以10至110公里/小时行驶的车辆上共38次连续成功着陆。

该系统还表现出对风扰、传感器误差及平台突发运动等外部干扰的较强鲁棒性。研究指出,更快的下降速度配合摩擦减震与反推力机制,反而有助于提升在复杂条件下的着陆稳定性。
该成果以“Friction Shock Absorbers and Reverse Thrust for Fast Multirotor Landing on High-Speed Vehicles”为题,发表于《Journal of Field Robotics》,为无人机在高速动态场景下的安全着陆提供了新的技术路径与实践验证。
▍创新落架系统与动态建模,拓展高速着陆能力边界
为了证明所提策略在挑战性条件下的着陆能力,研究团队开发了DART无人机系统,其核心是一项创新的起落架技术。该起落架系统由摩擦减震器(FSA) 与反向推力(RVT) 机制协同构成,旨在共同应对高速动态着陆的严峻挑战。FSA起落架的设计摒弃了传统刚性结构,其内部包含多组同心摩擦圆盘。在着陆撞击瞬间,这些圆盘发生相对旋转,通过持续的摩擦力将无人机的巨大动能直接转化为热能耗散掉,从而有效抑制反弹。与此同时,无人机的推进系统被赋予快速反转的能力,能在检测到接地信号后,迅速产生向下的推力,如同将无人机“按压”在着陆面上,显著增强了脚部与平台间的摩擦力,共同防止了着陆后的滑移与倾覆。


在理论验证层面,研究团队构建了一个精细的二维动态模型,以深入揭示整个着陆过程的动力学机理。该模型系统地整合了作用于无人机上的多种关键物理效应。首先,空气动力学方面,模型准确模拟了与速度平方成正比的空气阻力,并特别考虑了高速行驶车辆上方形成的空气边界层,这对精确计算无人机接近移动平台时的相对速度至关重要。其次,针对核心的FSA起落架,模型不仅描述了其通过摩擦耗散能量的主要功能,还捕捉了腿部在承受倾斜撞击时可能产生的横向弹性弯曲,这种弯曲会直接影响力的传递与无人机的姿态稳定性。此外,模型还包含了脚部与着陆面之间随法向力动态变化的摩擦力学,以及推进系统从正向拉力切换到反向推力的动态响应过程。这个经过实验数据反复校准的模型,成为一个能够可靠预测无人机在复杂撞击条件下行为的强大仿真工具。
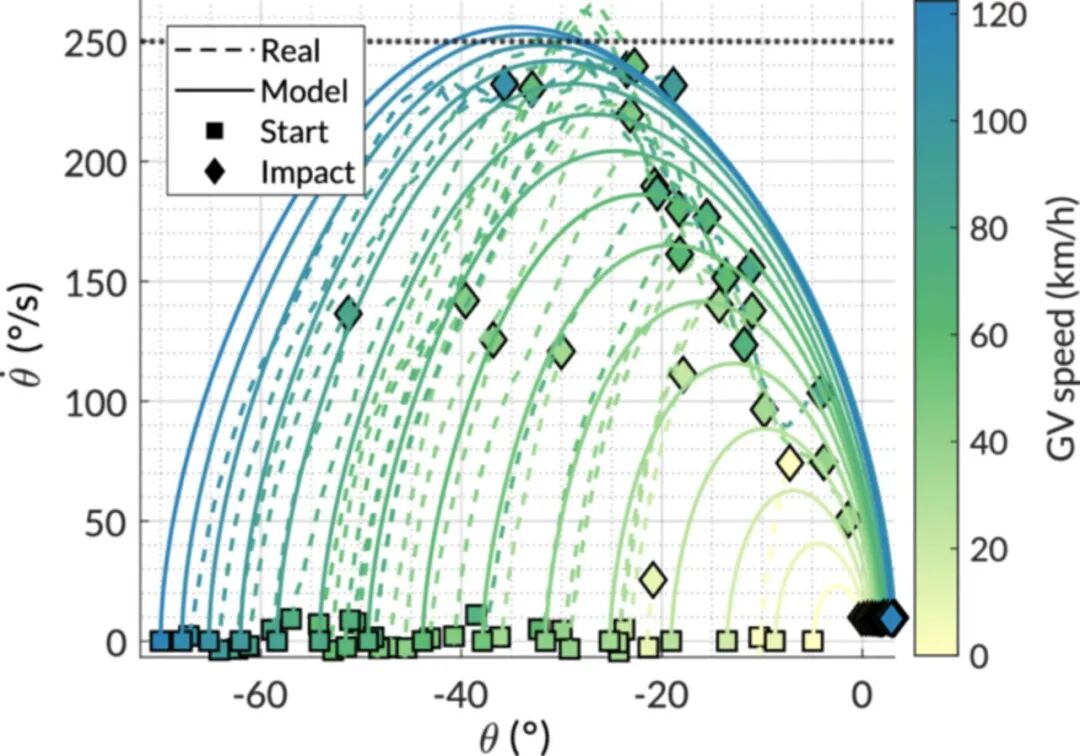
利用上述经过验证的模型,研究团队进行了大量的仿真,生成了着陆包线。这个包线实质上是一个多维度的成功着陆条件图谱,它清晰地界定了在不同变量组合下——包括地面车辆速度、无人机的垂直下降速度、水平相对速度、俯仰角及俯仰速率——无人机能够实现安全、稳定着陆的边界。分析表明,配备FSA和反向推力的系统,其成功着陆的包线范围远超传统刚性起落架。

基于此包线,研究进一步确定了调平机动的最佳时间窗口。团队模拟了无人机在最后进场阶段从飞行姿态转为水平姿态的整个过程,并评估了在整个机动过程中任一时刻发生撞击的成功率。结果显示,传统的起落架仅在机动开始或结束的某个狭窄时间窗内允许成功着陆。而DART系统由于其起落架对高冲击能量和复杂姿态的包容性,在整个调平机动中提供了一个更宽裕、连续的成功着陆时间窗口。这大大降低了对时机把握精度的要求,增强了系统在存在传感器误差或外部干扰时的鲁棒性。
▍实地试验+稳健性分析,验证无人机高速着陆系统可靠性
通过一系列现场试验,研究团队验证了其搭载摩擦减震器与反向推力系统的DART无人机在高速移动平台上的着陆能力。
试验在200米与400米直线路段进行,共计完成38次着陆,目标车辆速度为10至110公里/小时。在所有试验中,无人机均以2米/秒或3米/秒的下降速度接近,起落架摩擦扭矩设定为4N·m,最终实现了100%的着陆成功率。

实测数据显示,着陆瞬间的垂直冲击速度介于1.4至3米/秒之间,水平相对速度在-0.9至1.1米/秒范围内,俯仰角与俯仰速率均处于系统容许的包络之内。即便在110公里/小时的高速条件下,无人机着陆后的最大滑移距离也未超过2厘米,表现出优异的抗滑移与抗反弹性能。

为进一步评估系统在实际复杂环境中的可靠性,团队开展了基于蒙特卡罗方法的稳健性分析。该分析模拟了多种现实干扰,包括风速变化、车辆加减速、传感器估计误差以及气动参数不确定性等。

结果表明,在配合3米/秒的下降速度时,配备FSA与反向推力的DART系统在时速90公里的车辆上仍能保持约90%的预估成功率。与传统刚性起落架相比,该系统在高速条件下的成功率优势随着干扰强度的增加而进一步扩大。例如,在模拟车辆发生较强垂直或水平加速度时,该系统的成功着陆条件可达传统F450起落架的10至18倍。
研究还分析了无人机在开始执行调平机动时所允许的初始状态范围,即“飞行包络”。结果显示,采用FSA与反向推力组合的系统,其可接受的初始状态范围较传统起落架扩大了38倍。这意味着无人机能够在更严峻的飞行条件与外部干扰下,依然顺利进入并完成着陆机动,降低了对精确控制与复杂路径规划的依赖。
通过实地试验,团队成功验证了该着陆策略在真实高速场景下的可行性,而系统的稳健性分析则从理论上证实了其对各类现实干扰具备优异的容错能力,为无人机在动态复杂环境中实现可靠着陆提供了扎实的数据支撑与实践验证。
参考链接:
https://onlinelibrary.wiley.com/doi/10.1002/rob.70069