本白皮书将系统介绍 NVIDIA Isaac Lab。
Isaac Lab 是 Isaac Gym 的替代版本,该框架已将 GPU 原生机器人仿真扩展至大规模多模态学习的全新领域。Isaac Lab 整合了 GPU 并行的物理真实的仿真、逼真的渲染技术,以及模块化可组合架构,为机器人训练环境设计与策略优化提供了灵活高效的技术支撑。
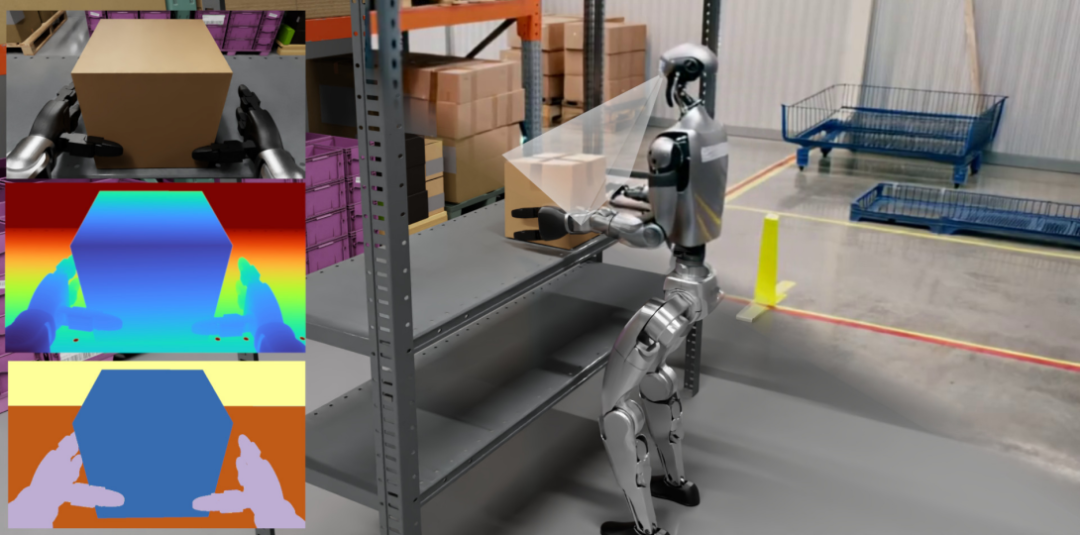
除物理仿真与渲染功能外,该框架还集成了执行器模型、多频率传感器仿真、数据采集流程及领域随机化工具,在单一可扩展平台内整合了大规模强化学习与模仿学习的最佳实践方案。本白皮书重点展示了其在各类具有挑战性的复杂任务中的应用,包括全身控制、跨具身形态移动、接触密集型操作及灵巧操作,以及结合人类演示数据实现技能习得等场景。
白皮书还探讨了 Isaac Lab 未来与可微分、GPU 加速的 Newton 物理引擎的集成计划。这有望为可扩展、数据高效和基于梯度的机器人学习带来新的可能性。通过整合先进的仿真技术、丰富的传感功能和数据中心级别的执行能力,Isaac Lab 将推动机器人技术迎来新的突破。
Isaac Lab 的技术亮点
模块化可扩展框架:
基于 NVIDIA Omniverse 构建,能为复杂机器人和任务提供高保真、GPU 加速的仿真支持。
先进传感器仿真:
支持平铺 RTX 渲染、基于 Warp 的自定义传感器,以及用于丰富观测空间的物理数据。
无缝遥操作与数据采集:
整合 3D 鼠标、VR 头显等设备,可实现大规模演示数据采集。
丰富的环境套件:
提供多样化、可直接使用的环境,适用于强化学习、模仿学习和仿真到现实迁移的研究。
Isaac Lab 白皮书
章节内容概览
1. 引言
2. 核心仿真基础设施
2.1 机器人领域的 USD 技术
2.2 物理仿真
2.3 渲染
3. Isaac Lab 设计与功能
3.1 资产
3.2 传感器
3.3 执行器
3.4 控制器
3.5 遥操作支持
3.6 程序化生成
3.7 任务框架与环境
4. 仿真性能
4.1 环境吞吐量
5. 学习技术与工作流
5.1 强化学习
5.2 基于群体的训练
5.3 域随机化
5.4 模仿学习
5.5 合成数据生成
6. 在机器人研究中的应用
6.1 移动控制
6.2 全身控制
6.3 导航
6.4 工业操作
6.5 灵巧操作
6.6 医疗健康
6.7 通用基础模型
7. 结论
8. 未来工作与探讨
8.1 Newton 引擎与 Isaac Lab 的集成
8.2 策略评估与基准测试
点击“阅读原文”或扫描下方二维码,获取完整白皮书: