







装配微链驱动系统的类人机器人
展示精密的机械结构(机器人结构构想图)


01
REPORT
传统驱动系统的不足之处
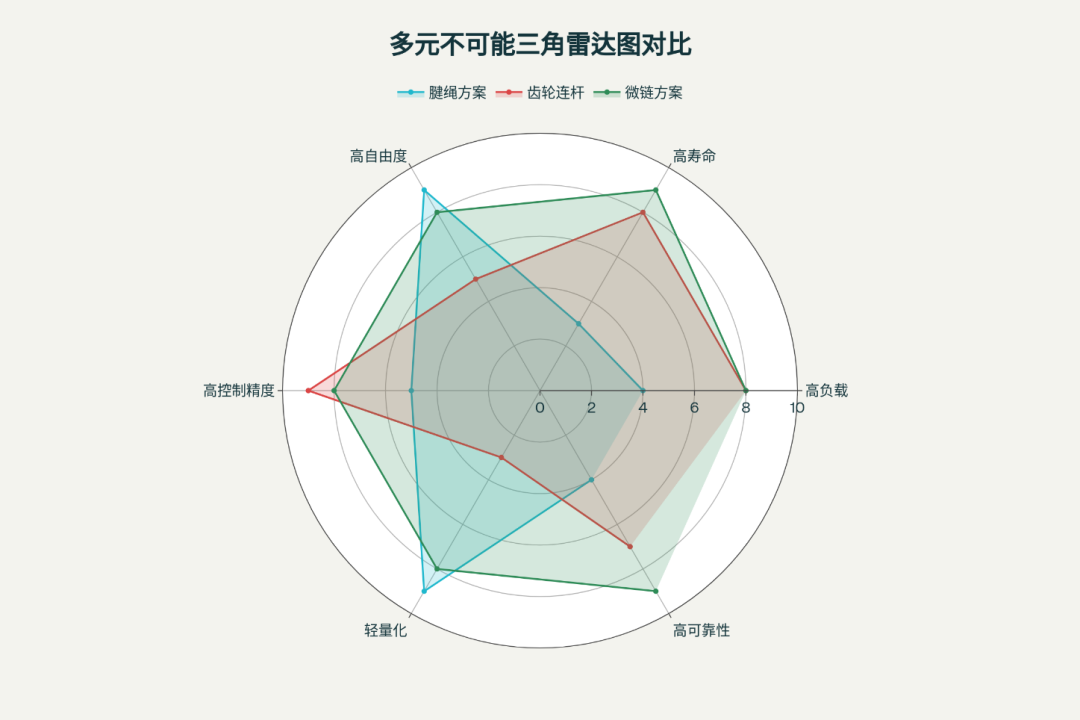
多元矛盾集成与市场痛点



02
REPORT
具身传动方案困境
现状阐释

03
REPORT
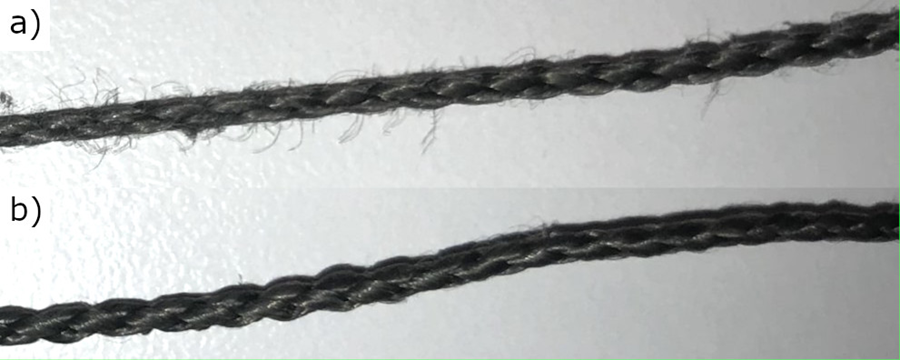
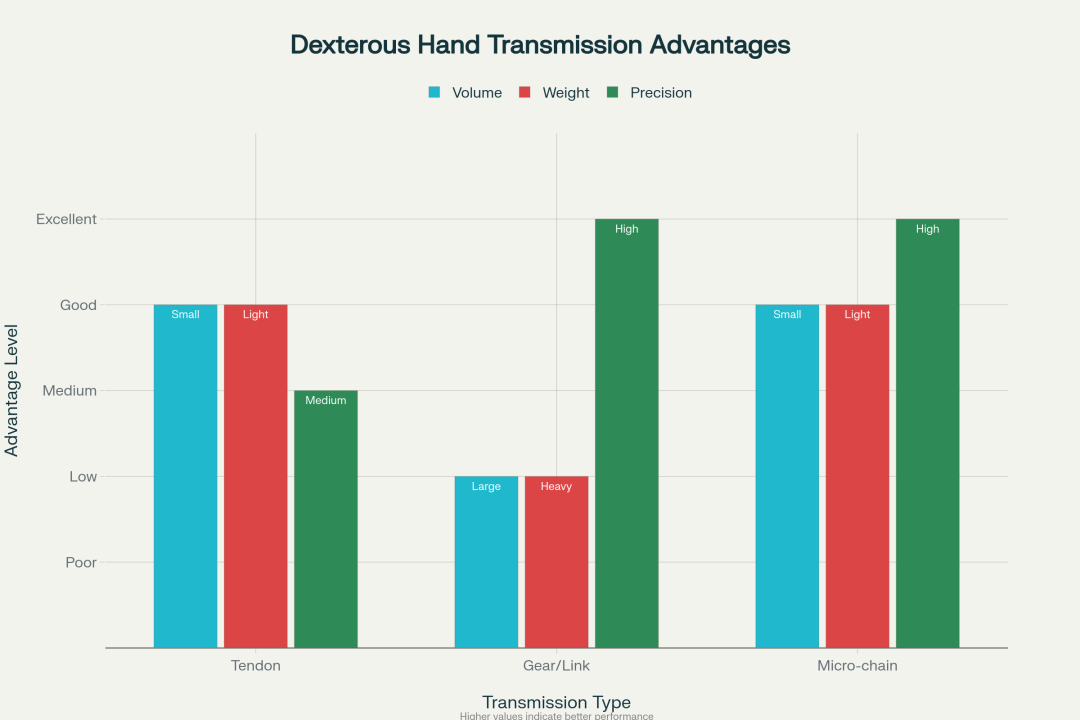
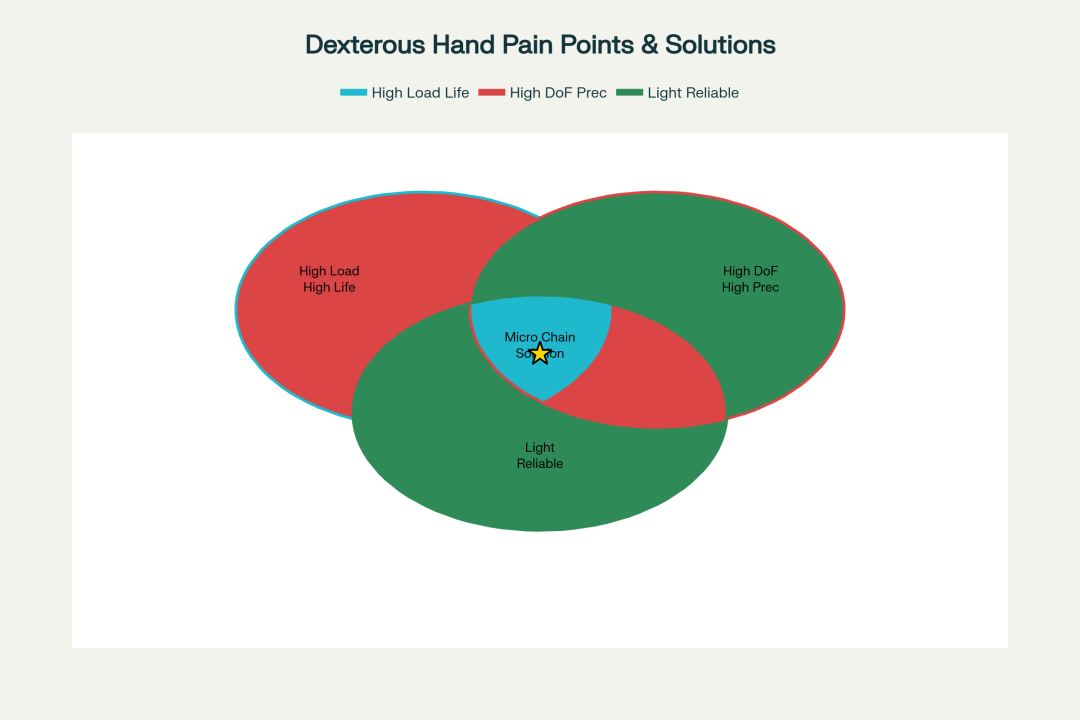
微链方案的突出优势
集成痛点,促进商用落地








04
REPORT
行业价值与落地关键
能用、耐用、好用







<<< 参考文献 >>
T. Heinemann, R. Wallace and M. Liarokapis, "On Chain Driven, Adaptive, Underactuated Fingers for the Development of Affordable, Robust Humanlike Prosthetic Hands," 2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, GA, USA, 2025, pp. 953-959
https://www.ofweek.com/ai/2025-09/ART-201717-11000-30670677.html
https://pdf.dfcfw.com/pdf/H3_AP202502121643014502_1.pdf
https://www.fxbaogao.com/detail/4655458
https://www.fxbaogao.com/detail/4238726
https://pdf.dfcfw.com/pdf/H3_AP202501031641805963_1.pdf
http://news.cnfol.com/it/20250731/31509560.shtml
https://znyj.ofweek.com/news/2025-09/ART-23013-11000-30670685.html
https://www.stcn.com/article/detail/2981703.html
https://wap.eastmoney.com/a/202505193408446965.html
http://cgws.com/cczq/ggdt/ccyj/202403/P020240304307538991639.pdf
https://pdf.dfcfw.com/pdf/H3_AP202404231631065378_1.pdf
https://www.leaderobot.com/news/4597
https://wap.eastmoney.com/a/202411293254639233.html
https://news.futunn.com/hk/post/60656613
https://blog.csdn.net/weixin_39699362/article/details/149439766
https://pdf.dfcfw.com/pdf/H3_AP202507241714854154_1.pdf?1753381727000.pdf
https://pdf.dfcfw.com/pdf/H3_AP202409261640051493_1.pdf
https://9fzt.com/common/d024f068a8e447b32ed27a38682bc04a.html
https://pdf.dfcfw.com/pdf/H3_AP202504231661162178_1.pdf?1745438914000.pdf
https://pdf.dfcfw.com/pdf/H3_AP202506271698567882_1.pdf?1751038170000.pdf
https://ne-time.cn/web/article/36717
https://www.cls.cn/detail/2145957
https://www.eet-china.com/mp/a445034.html
Lorenzo De Rossi, et al., "Multibody Efficiency Analysis of Chain Drives in Racing Motorcycles," Journal of Applied and Computational Mechanics, Vol. 8, No. 4, 2022, pp. 1293-1306
日本椿本链条(Tsubaki)官方新闻:超紧凑滚子链产品发布,2024年9月,https://tsubakimoto.com/company/news/press/2024/09/17/1/
Renold Chain, "Design Guide Specification Guidelines" Section 3, 2020
https://tt-net.tsubakimoto.co.jp/tecs/pdct/cdc/feat/pdct_feat_cdc_CESS.asp?_gl=1wh8s5d_gcl_auMTExNDc1OTMyNS4xNzM4NzM4OTkx_gaMTY1OTkzMDQ0My4xNzIxMjc5ODE3_ga_79ZQ63NZ7Y*MTc0MTMxNTMzMi4xOC4xLjE3NDEzMTU0MjguMjkuMC4w&lang=cn











