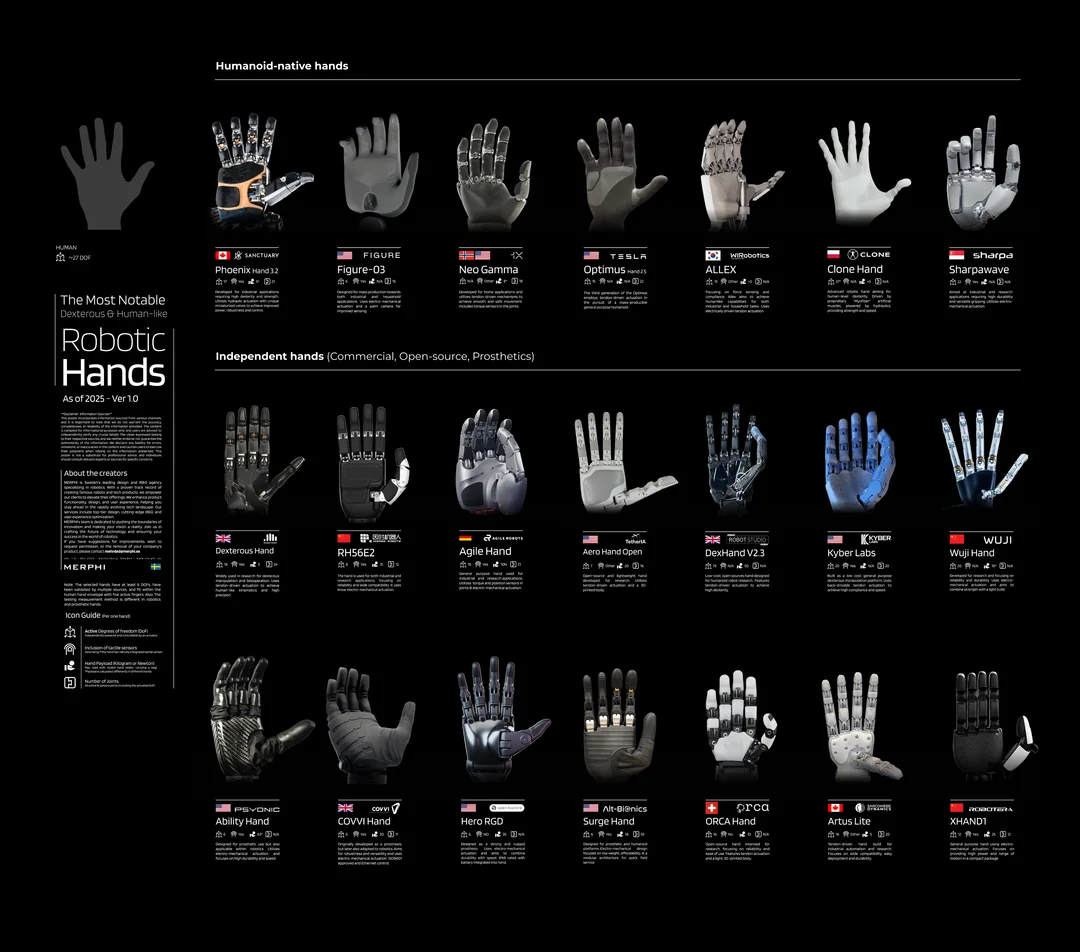
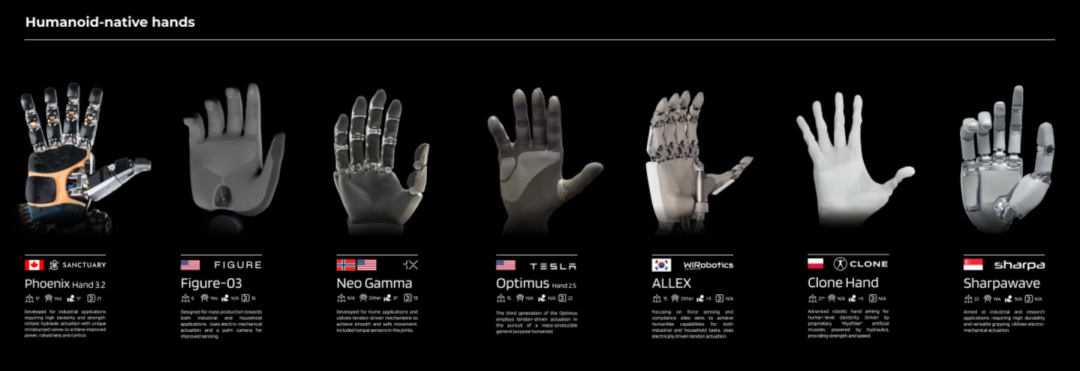
全球灵巧手盘点以及新趋势猜想 | 逛Reddit刷到了merphi的大盘点,感觉很有意思,手分两种,人形原生手7款和独立手14款,不知道什么原因,原生手里是没有把国内的产品纳入,而是纳入到独立(通用)手,看了下各自的技术参数,猜测未来发展趋势,可能是:
1. 全直驱 + 高自由度的微型化突破
机器人核心技术?微型化,应该是我最近提到最多的词。WuJI HAND在前段时间刷屏的时候,明显感觉到微型直驱电机的集成化这个趋势,毕竟当前电机体积仍制约人形机器人的手臂空间适配。
2. 感知技术从单一触觉到多模态智能融合
在这个你认为具身智能是通往AGI(通用人工智能)的必经之路吗?回答中我比对过今年3月和11月底的具身智能圆桌讨论,各位大佬不仅强调多模态感知学习效率超视觉-语言大模型,还提到了多模态数据的重要性,这点不仅限于人形机器人,灵巧手的感知亟待升级优化。
3. 场景化定制的垂直细分
在2025 年 11 月十大机器人技术进展中,阿姆斯特朗机器人公司计划打造通用厨房机器人,从洗碗功能起步,这就是专注吃掉垂直场景中的客户,当前的灵巧手仍然是偏通用,需要更加垂直到场景中,家庭服务、工业装配、医疗康复等等方向,把任何一个市场吃精吃透,都能打败无效内卷,毕竟内卷无法持久。
4. 低成本规模化:开源 + 量产硬件普及
在前面提到的具身智能圆桌讨论中,就有大佬提到硬件仍然是瓶颈,3月更多在于场景泛化和鲁棒性能力,11月则是硬件可靠性,被指出仍是巨大挑战。对硬件瓶颈还是算法瓶颈的讨论更为深入。
5. 人形机器人的全身协同深化
人形原生手会从单独手控升级为全身运动协同,就像人轻轻俯身去拾起物品一样,减少单一手的负载压力,提升复杂场景下的操作稳定性。有空可以瞅瞅人形机器人有哪些好的研究课题?

本文只做学术分享,如有侵权,联系删文