
选择无人机飞控上的IMU时,需要考虑以下因素:
1.自由度 (DoF):大多数IMU采用6-DoF(加速度计+陀螺仪)或9-DoF(加速度计+陀螺仪+磁力计)配置。
2.量程:在无人机飞控上,加速度计一般采用±8g~±16g量程的、陀螺仪一般采用±300°/s~±2000°/s量程的,具体视机型和场景而定。
3.灵敏度(sensitivity):代表最大角速度或加速度取样精度,对于加速度计,高精度场景(如测绘无人机)需达到μg级,消费级产品通常为mg;对于陀螺仪,工业机器人在0.1°/s即可。
4.精度:高端IMU提供更低的漂移和更好的精度。通常飞控要求IMU模块Bias在10°/h以内。
5.接口兼容性:接口是SPI/IIC还是UART,确保与MCU系统兼容。

二、SGPM01-2000 IMU模组
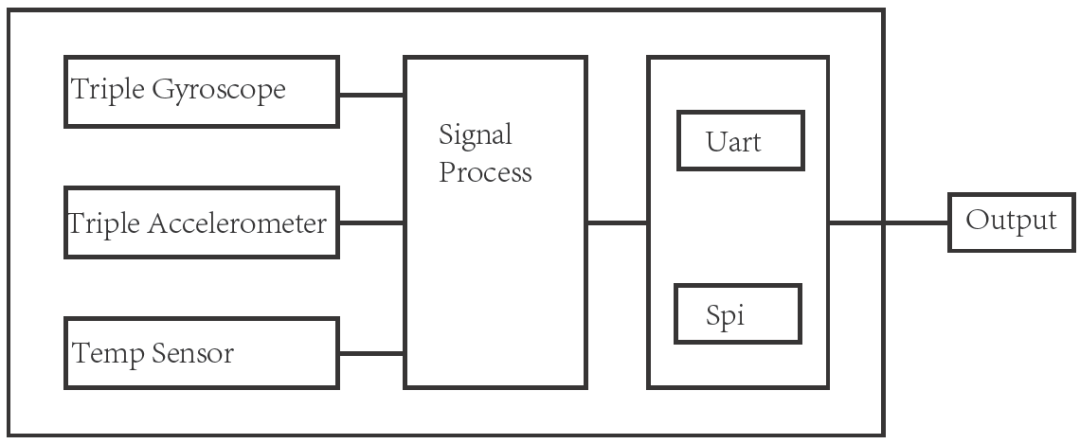
2.产品特性
▋高精度6轴IMU模组;
▋输出三轴加速度值,三轴角速度值,姿态角(Pitch,Roll,Yaw),四元数、温度;
▋数字通讯接口UART和SPI;
▋产品尺寸:24*22*8mm;
▋低功耗。
3.规格参数
1)陀螺仪关键指标

Notes:IMU模组的最大量程可达±2000dps,高精度范围在±400dps以内。IMU模组在±400dps以内,陀螺仪的精度可达到0.3%以内,典型值在0.1%以内。IMU模组在超过±400dps以后,陀螺仪的精度大概在1%典型值。
2)加速度计关键指标




联系人(微信同号):
135 5880 7959/199 2877 4812
邮箱:ECC-EDGyro@ecc.epson.com.cn










