以ADIS465的陀螺仪为例,主要参数:
1.动态范围Dynamic Range:这个动态范围是指量程。
2.重复性Repeatability:指高温下测试500小时角速度的测量误差,0.3%。所谓重复是指同温、同测量位置反复测量,然后在所有测量点(不同条件的组合)看误差,而不会在不同的条件看误差。PS:这个不是断电重复性。
3.全温误差Error over Temperature:同一位置不同温度测量的误差,0.3%。
4.非线性度Nonlinearity:常温下,实际输出-输入曲线与拟合直线之间的最大偏差,通常以 “满量程(Full Scale Range, FSR)的百分比” ,0.25%。
5.零偏重复性Bias Repeatability:指高温下测试500小时角速度的测量误差,0.4°/s。
6.零偏不稳定性Bias Instability:通过Allan方差曲线的谷底值计算,要求采集≥10小时的静态数据。仅反映器件在 “理想无干扰条件下” 的性能极限。
7.在线零偏稳定性In-Run Bias Stability【重要】:通过多时间窗口的均值标准差计算,采集≥4小时静态数据,按10秒/ 100秒窗口平滑后统计均值的离散程度,直接反映实际应用中的漂移水平,更贴近实际应用场景。通常比Bias Instability(Allan方差)值大5~10倍。ADIS465的In-Run Bias Stability实际是Bias Instability。
8.角度随机游走(ARW)【重要】:对角度的不确定性的描述(所以在角度公式上加如该噪声)。注意:陀螺仪输出的是角速度。可以通过Allen方差获得(长期静止采集数据,然后分段积分统计计算)。
。
9.零偏输出噪声Output Noise(全频带):角加速度的不确定描述。注意ARW是角度的不确定描述。
10.零偏输出噪声密度Output Noise Density:噪声随频率的分布特性。
三、加速度参数
以ADIS465的加速度为例,主要参数:
1.动态范围(量程):指加速度计能测量的最大加速度值,以ADIS16465为例,量程为±8g。
2.标度因子相关指标(灵敏度及误差)
3.静态零偏参数(核心精度指标)
4.噪声特性
4.其他辅助指标
以“无人机导航”为例,对比两大级别IMU的表现:

选择合适的IMU,可根据不同的无人机需求量身定制,在性能、尺寸、耐用性和成本之间取得平衡:
1.精度是IMU选择的决定性因素。对于需要精确数据的应用,例如3D测绘或基础设施检查,需要高性能IMU,其陀螺仪零偏稳定性应低于每小时1度,加速度计零偏稳定性应低于0.1mg。对于要求较低的任务,例如休闲飞行或轻型商用飞行,标准IMU能够以较低的成本提供足够的性能。
2.外形尺寸是另一个关键考虑因素。小型无人机受益于紧凑轻巧的IMU,从而节省有效载荷和能耗。然而,减小尺寸绝不能以牺牲性能为代价,尤其是在恶劣环境下。对于在极端温度或高振动条件下运行的无人机来说,耐用性至关重要,而坚固耐用的IMU是确保其可靠运行的必要条件。
3.功耗也起着一定作用。低功耗IMU非常适合需要长续航的应用,而功耗更高的IMU则更适合需要更高精度的任务。
4.成本范围从基础单元的不到500美元到高端战术级系统的10000美元以上不等。理想的选择取决于具体的无人机任务、预算和操作环境。
对几款市面上常见的主流IMU进行了振动测试,从结果上看:类似的IMU在振动情况下表现差异巨大。
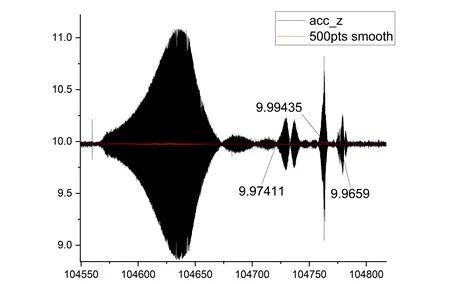
1.三款IMU同时安装在垂直振动台面上,振动输入轴为垂向,正常输出应为9.8m/s^2,振动情况下除了噪声外加速度计测量值不应有过大的偏离。但是,在这个很常见的振动量级扫频振动下,IMU-1(最下边一行)出现了8.5m/s^2的输出误差(9.69-1.16);IMU-2~3mg;而表现最好的IMU-3。


2.在进行如工程机械等强振动场景下的MEMS-IMU应用设计时,需要考虑振动对IMU性能的影响。但是,振动情况下的IMU表现在厂家给出的datasheet中常不可见,而厂家自测报告所用的测试条件未必涵盖实际应用场景。因此,有条件时可以通过整机振动台测试定量分析工程条件下的组合导航系统表现,必要时采用外减振等方式进行隔离。
3.信号处理中不止一次学到奈奎斯特采样定理:要从抽样信号中无失真地恢复原信号,抽样频率应大于2倍信号最高频率。但是如果不符合采样定理会出现什么现象呢?如果被采样信号频率不满足奈奎斯特采样定理,即欠采样,由此导致的混叠信号频率f为:|kfs-f0|,这里k为正整数,fs为采样频率,f0为信号频率。如果信号频率f0为220Hz,fs为200Hz,那么混叠信号频率f=|200-220|=20Hz;如果信号频率f0为350Hz,fs为200Hz,那么混叠信号频率f=|2*200-350|=50Hz。那么振动试验中陀螺或加速度信号对外呈现的正弦包络原因就清楚了:因为惯导采样多为100~200Hz,而振动试验通常频率更高,导致此种情况下IMU通常处于欠采样状态所致;即如果IMU采样频率为200Hz,而振动频率为300Hz,则观察采样信号波形会出现100Hz的包络曲线)。