onsemi 做了一个“无人机与机器人智能感知及电源解决方案”的Webseminar,介绍了很详细的无人机内容,从市场趋势、应用场景,到电源架构、电机驱动、快充方案和智能感知方案,我们从无人机本身的电源和快充来看一看。

Part 1
现在全球的半导体把机器人作为核心市场,无人机类似于空中机器人,整个增长算是比较低的。
在机器人领域人形机器人 CAGR 约 50%,协作机器人(Cobot)30%,自主移动机器人(AMR)30%和无人机 15%。
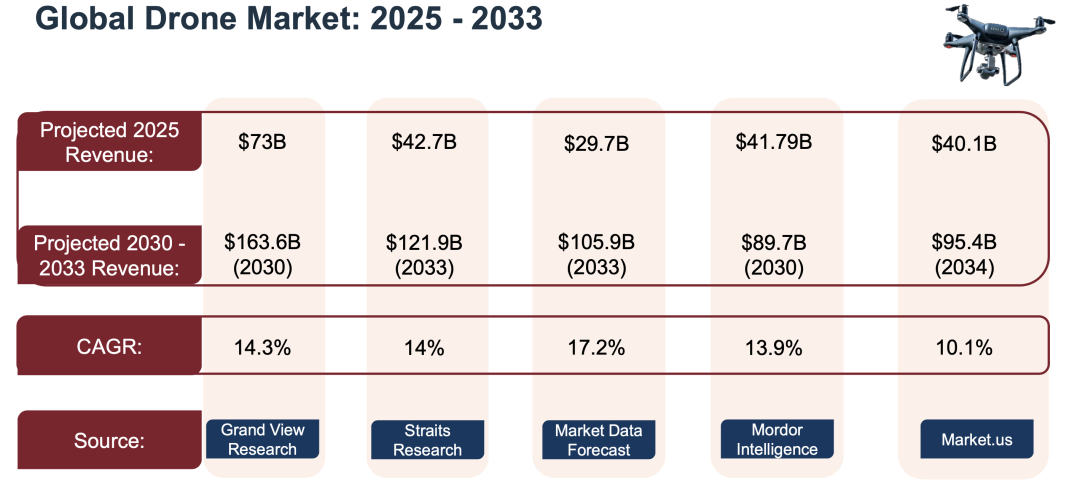
全球无人机市场规模预计2025 年约 730 亿美元,2030 年将达 1636 亿美元,CAGR估算约14%。
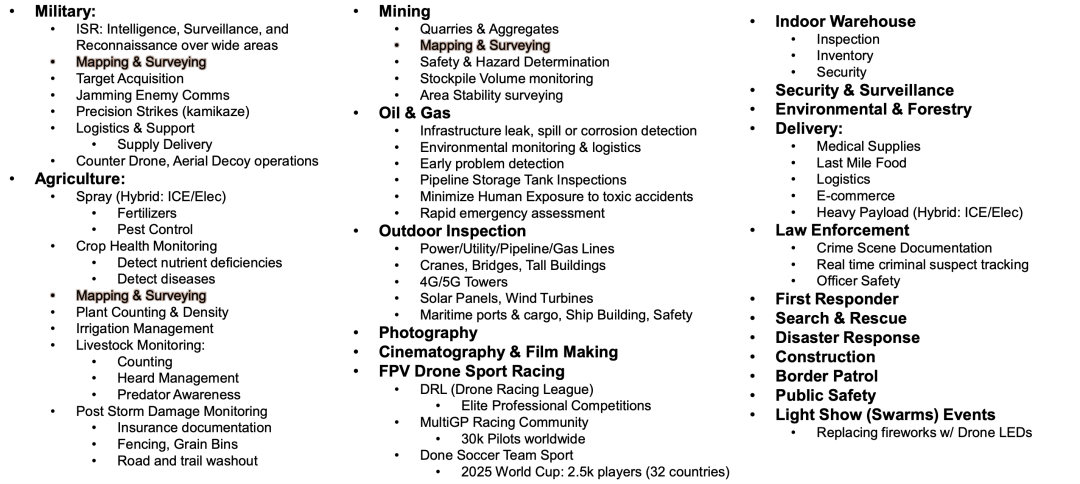
从应用结构看:
◎ 军事用途占 48.8%(大家懂的),
◎ 商业用途占 35.5%,
◎ 消费级占 15.7%。
在商业细分中:
◎ 建筑测绘占比最高(56.7%),
◎ 其次是公共安全、农业、油气和采矿。
无人机作为一个延伸的产品,已经从“航拍玩具”变成生产力工具,无人机灯光秀这样的新兴市场,2024年规模已达15亿美元,2033年预计超过60亿美元。
它不仅是娱乐创新,更是“烟花替代”的可持续解决方案。

和机器人一样,不同无人机,功率差异极大
◎ 纳米级无人机:0.1W–1W
◎ 微型无人机:5W–50W
◎ 消费级:100W–300W
◎ 商业级:1kW
◎ eVTOL:10kW–250kW
◎ 混动 eVTOL:最高 1.5MW

一台1kW商业无人机,若采用四轴结构,每个BLDC电机大约250W,从电源设计、电池容量到驱动架构,完全不是一样的设计,差异非常大。
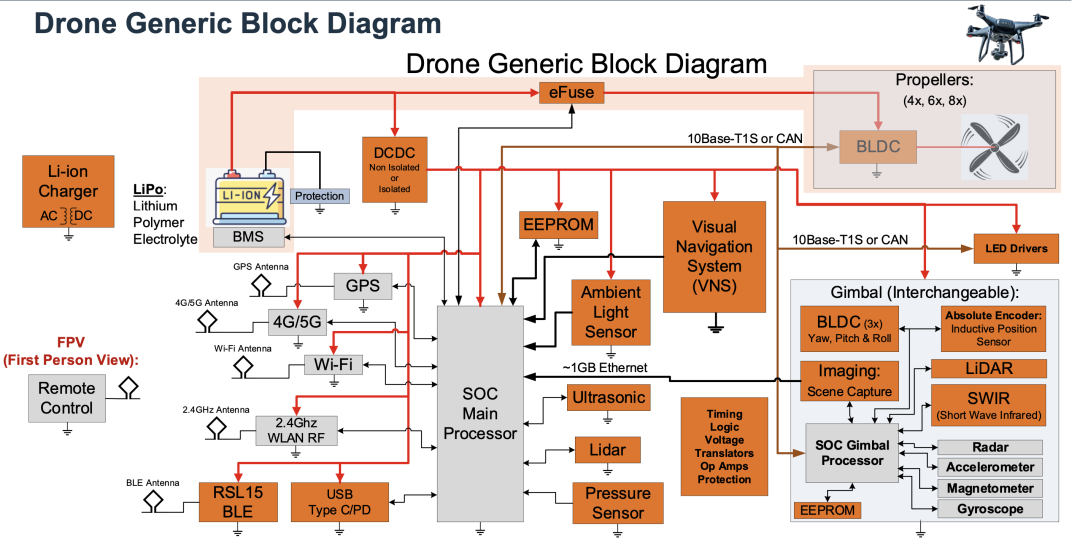
无人机通用框图的核心架构:
◎ 以SOC 主处理器为控制中枢,通过各类通信模块(GPS、4G/5G、Wi‑Fi、2.4GHz WLAN、BLE 等)实现与遥控器及外部网络的连接;
◎ 电池单元经 BMS、DC‑DC 和 eFuse 提供稳定电力;
◎ 通过视觉导航系统(VNS)、环境光、超声波、激光雷达、压力传感器等感知环境;
◎ 动力系统由 BLDC 电机驱动多组螺旋桨,同时可搭载可更换云台系统,集成 BLDC 云台电机、成像模块、激光雷达、SWIR 及惯性测量单元(IMU)等,实现稳定拍摄与多模态感知,整体通过高速总线(如 1GB 以太网、10Base‑T1S 或 CAN)实现各子系统间的高效数据交互。
Part 2
无人机最核心的硬件模块不是摄像头,而是电源分配与动力驱动系统。
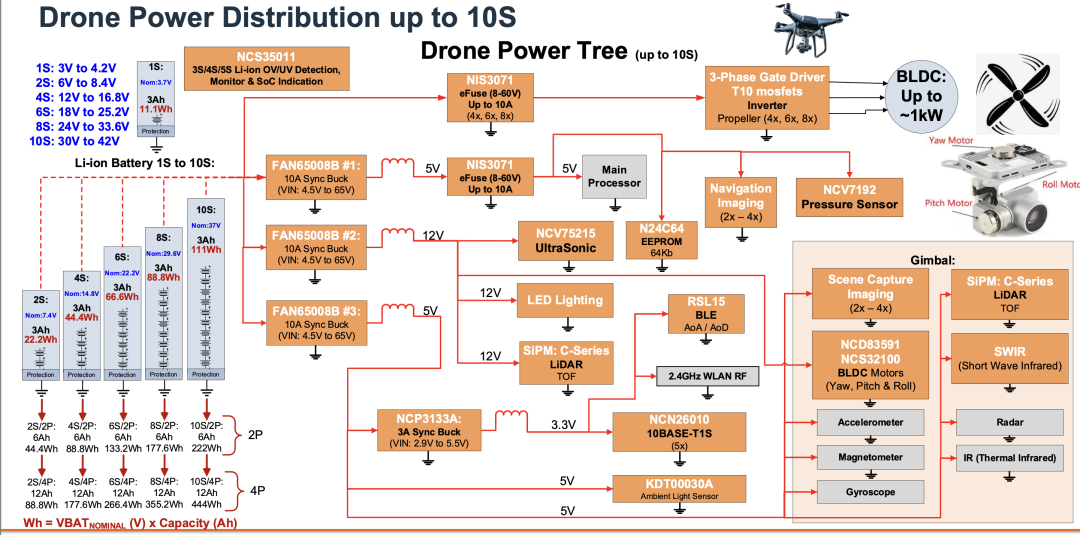
锂电池以1S为基础(3.7V),通过串联扩展至4S(14.8V)、10S(37V)等。
安森美的核心电源方案包括:
◎ FAN65008B 同步降压转换器(4.5V–65V输入)
◎ NCS35011 电池过压/欠压检测
◎ NIS3071 eFuse 电子保险丝(过流/过热保护)
eFuse的意义在于:当某一模块异常时,可以独立切断电源,避免整机失效,对于高空飞行器来说,这种分区保护是安全底线。
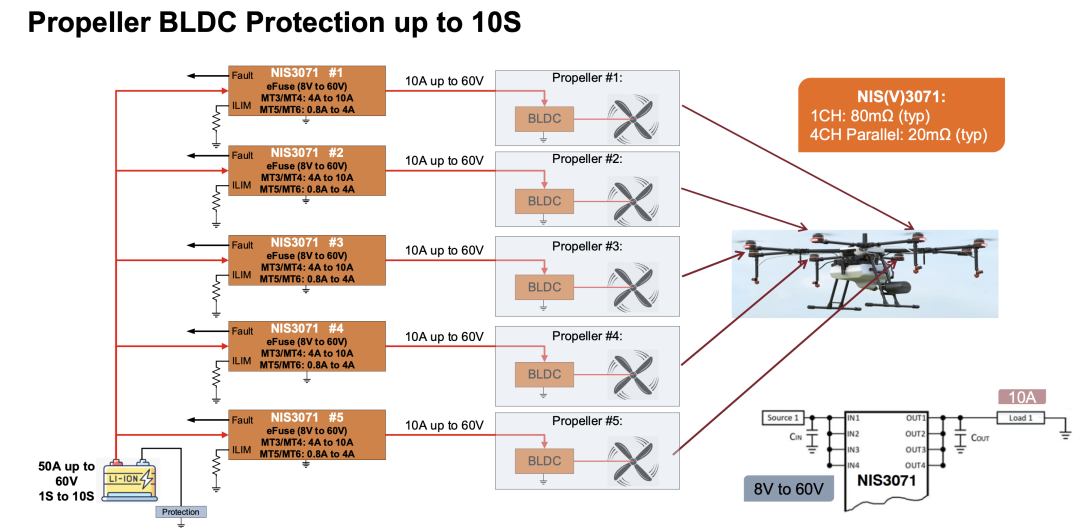
无人机几乎全部采用无刷直流电机(BLDC),架构包括eFuse保护层、三相栅极驱动器、MOSFET功率器件和位置传感器。

◎ 在核心驱动层,安森美的 NCD83591 三相驱动器支持 5V–60V 工作,集成保护机制,简化BOM成本。
◎ 在功率开关器件方面,T10系列MOSFET导通电阻低至 0.42mΩ,导通电阻越低,发热越小,效率越高,续航时间越长。
◎ 位置检测方面,NCS32100 电感式传感器精度可达 0.0138°,转速支持 45000rpm。
相比传统光学或磁性方案,它抗振动、无需稀土材料,重量更轻,飞行控制更精准,响应更快。


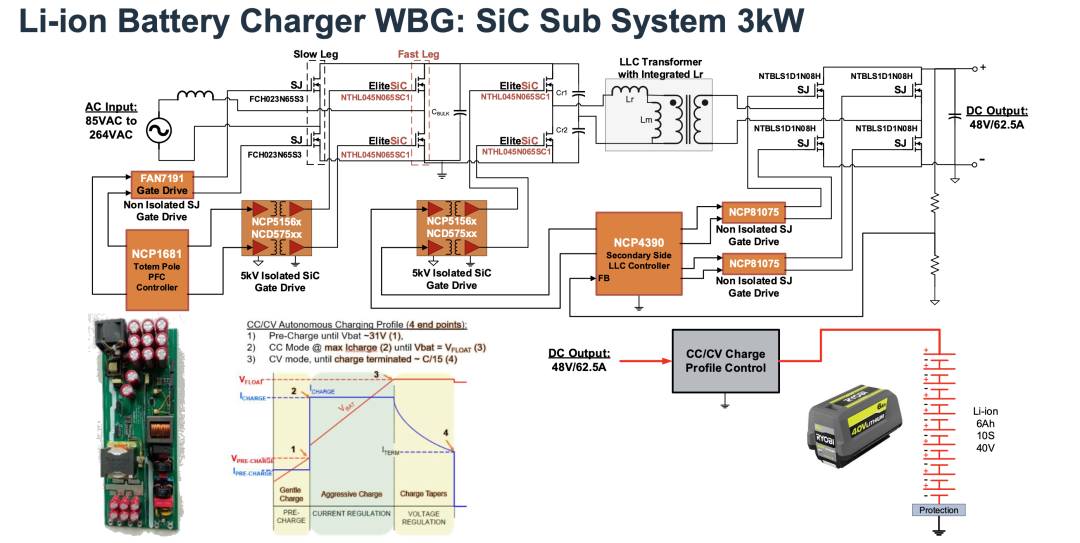
当无人机功率进入kW级别,充电效率就成为运营成本的核心变量。安森美给出的方案是基于碳化硅(SiC)的3kW快充系统,架构包括图腾柱PFC、LLC谐振变换器和EliteSiC MOSFET,输入85V–264V AC,输出48V/62.5A DC,适配10S电池。
碳化硅器件的优势是更高开关频率、更低损耗、更小体积,配合标准CC/CV充电曲线(预充→恒流→恒压→涓流),可在保证电池寿命的同时提升充电速度。对于物流无人机或巡检无人机而言,缩短充电时间等于提升资产利用率。
无人机行业的技术核心是功率电子与感知系统,飞控算法、视觉AI当然重要,但真正决定续航、安全性、功率密度的,是半导体与功率器件。
当SiC、eFuse、高精度位置传感器成为标配,无人机将进入更高功率、更高可靠性的阶段。