【科技纵览】2026年2月9日,科技区角获悉,飞捷科思智能科技(Fysics AI)携手复旦大学认知智能技术实验室(CITLab),正式推出全球首个专为真实物理世界设计的全模态物理AI基础模型——OmniFysics。该模型聚焦当前生成式人工智能普遍存在的“物理盲”缺陷,即尽管能产出高保真图像或流畅对话,却在涉及重力、材质、密度等基本物理规律时频繁产生违背常识的“幻觉”。
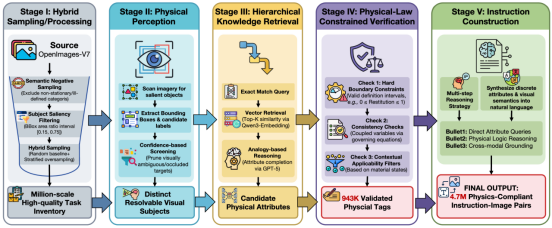
与依赖大规模视觉数据进行表层模式匹配的传统大模型不同,OmniFysics采用仅30亿参数的轻量级架构,并创新性地嵌入物理感知与因果推理机制。其核心依托两大原创数据生态:“静态中枢(FysicsAny)”用于识别物体固有属性,如陶瓷的硬度或水的流动性;“动态中枢(FysicsOmniCap)”则解析多感官融合下的物理因果关系,例如不同材质碰撞所发出声音的差异。
这一架构使模型突破传统像素级生成局限,深入至物理参数反演层面,可准确预测密度、杨氏模量等关键仿真指标。在训练策略上,OmniFysics实施四阶段渐进式方法:先分别强化各单模态感知能力,再推进全模态深度融合,从而兼顾任务专精性与跨模态协同效能。
为客观衡量其物理理解能力,研发团队同步发布了FysicsEval评测基准。该体系覆盖物理属性预测、逻辑推理及跨模态一致性校验三大维度,专门检验AI能否识别“水往高处流”等明显违反物理定律的现象。此举为具身智能从语言语义理解向真实物理交互演进,提供了首个可量化的评估标尺。
当前,随着AI系统逐步从虚拟内容生成转向现实世界操作,物理常识建模已成为通向可靠智能体的关键瓶颈。OmniFysics的推出,标志着行业正从“看起来合理”迈向“实际上正确”的新阶段。
全球首个全模态物理AI基础模型OmniFysics发布,直击生成式AI“物理盲”痛点
科技区角
2026-02-09 13:32
声明:内容取材于网络,仅代表作者观点,如有内容违规问题,请联系处理。