点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
来源:3D视觉工坊
星球内有20多门3D视觉系统课程、300+场顶会讲解、顶会论文最新解读、海量3D视觉行业源码、项目承接、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎加入!
0.这篇文章干了啥?
这篇文章提出了 FC-Vision,一种实时的、具备可见性感知的重新规划框架,用于在未知环境中对目标结构进行无遮挡的无人机扫描。现有无人机扫描方法大多强调避障和效率,却忽视了遮挡导致的可见性下降问题,严重影响扫描质量。FC-Vision 通过两级分解策略,将问题分解为符合目标可见性完整性和清洁性的两个层次。第一级,在覆盖和遮挡约束下更新视点,采用混合采样和优化方法生成无遮挡、安全的替代视点,并通过解决顺序排序问题确定访问顺序以保持效率;第二级,在 5 自由度空间中进行分段清洁传感连接,使用 Phi-A* 搜索算法高效寻找高质量的清洁传感段。此外,文章还提出了一种插件集成策略,可将 FC-Vision 无缝集成到现有无人机扫描系统中。在多个模拟和真实场景中的实验表明,FC-Vision 显著提高了扫描质量,最高可将目标覆盖率提高 55.32%,将遮挡率降低 73.17%,同时实现了实时性能,飞行时间仅有适度增加。
下面一起来阅读一下这项工作~
1. 论文信息
论文题目:FC-Vision: Real-Time Visibility-Aware Replanning for Occlusion-Free Aerial Target Structure Scanning in Unknown Environments 作者:Chen Feng, Yang Xu, Shaojie Shen 作者机构:Department of Electronic and Computer Engineering, The Hong Kong University of Science and Technology, Hong Kong, China 论文链接:https://arxiv.org/pdf/2602.13720
2. 摘要
摘要
目标结构的自主航空扫描对于实际应用至关重要,这需要在飞行过程中对未知障碍物进行在线适应。现有方法大多强调避障和效率,但忽略了遮挡引起的可见性下降问题,严重影响了扫描质量。在本研究中,我们提出了 FC - Vision,这是一种实时可见性感知的重新规划框架,它能在主动且安全地防止目标被遮挡的同时,保留原计划的预期覆盖范围和效率。我们的方法通过高效的两级分解,明确实施密集表面可见性约束,以实时规范重新规划行为:首先进行无遮挡视点修复,在与名义扫描意图偏差最小的情况下保持覆盖范围,然后在五自由度空间中进行分段清晰感知连接。我们还提出了一种插件集成策略,可在不改变架构的情况下,将 FC - Vision 与现有的无人机扫描系统无缝对接。全面的模拟和实际评估表明,FC - Vision 在意外遮挡物存在的情况下持续提高扫描质量,实现了最高 55.32% 的覆盖增益和 73.17% 的遮挡率降低,同时在飞行时间适度增加的情况下实现了实时性能。源代码将公开提供。
3. 效果展示
图1. 概览。给定目标结构(A)及其标称扫描计划(B),FC-Vision支持实时重规划,主动避开新出现的未知障碍物,同时确保无碰撞和无遮挡的感知,从而保留原始计划的预期覆盖范围和效率(C)。相比之下,现有的仅考虑碰撞的重规划无法防止视场遮挡,导致观测被遮挡和结构完整性下降(D)。
图8. Room场地的真实世界测试结果。(A) 目标结构,(B) 环境变化:新引入的未知障碍物,(C)-(D) 分别为FC-Vision和Colli-Free的飞行轨迹、机载视角和三维重建结果。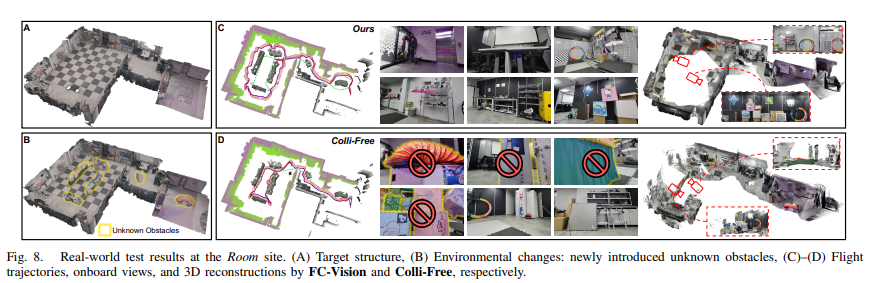
4. 主要贡献
文章的主要贡献如下:
一个实时重规划框架,该框架在在线出现的障碍物中明确确保目标可见性,同时维持安全性和效率,通过两个新颖的模块进行增强: (i)混合采样与优化的视点修复; (ii)用于高效 5 自由度分段搜索的 Phi-A* 算法,可同时避免碰撞和遮挡。 一个插件式系统集成方案,允许现有的扫描无人机以即插即用的方式采用 FC - Vision,而无需重新设计底层流程。 在非结构化场地进行的大量真实世界和模拟评估,证实了所提出方法的实用性和性能。据我们所知,这是第一项为未知环境中的无遮挡空中目标结构扫描提供保障的工作。该实现的源代码将公开。
5. 基本原理是啥?
1. FC - Vision 整体目标
FC - Vision 是一个实时的、考虑目标可见性的重规划框架,旨在未知环境中对目标结构进行无遮挡的安全高效的空中扫描。它能在尊重原扫描计划的覆盖范围和效率的同时,主动避免碰撞和目标遮挡。
2. 问题建模与分解
统一联合问题:将重规划问题建模为对新路径的耦合优化问题,目标是最小化与原扫描意图的偏差和路径长度,同时满足目标覆盖、无碰撞和无遮挡的约束。但由于可见性依赖离散的射线 - 几何交互、覆盖保存的组合结构以及在线地图更新时的观测清洁度要求,该问题高度非凸,实时优化困难。 两级分解: 一级:覆盖和遮挡约束下的视点更新:计算一个安全的视点集和访问顺序,使其与参考集偏差最小,同时保持名义覆盖并确保视点处无遮挡感测。通过最小化集合差异和旅行成本,满足覆盖和安全约束。 二级:5 - DoF 空间中的分段清洁感测连接:给定有序的视点,用最短的 5 - DoF 分段连接每个连续的视点对,确保整个分段安全且无遮挡。
3. 方法实现细节
无遮挡视点修复与覆盖保持及访问顺序重排: FoV 截断球形采样:在规范帧中预计算方向模板,采样受 FoV 水平和垂直角度限制的角度偏移,为无效视点在球面上生成候选点。 沿视线的解析位置优化:对于固定角度的采样候选点,仅沿视线平移相机中心进行优化。通过建模 FoV 截锥体为半空间的交集,计算覆盖和偏移量,选择使覆盖最大化的偏移量。 局部俯仰和偏航二分优化:固定位置后,根据最近障碍物的方位确定俯仰和偏航的可允许范围,采用二维二分法找到使覆盖最大化且无遮挡的朝向。 混合采样与优化的视点修复: 覆盖等效的视点集完成:为每个无效视点选择一个替换视点,若仍有未覆盖子集,通过贪心算法添加辅助视点,直到所有子集被覆盖。 意图一致的访问顺序重排:将原合格视点的相对顺序作为优先级锚点,仅允许新修复或添加的视点插入其中,将其建模为顺序排序问题,最小化遍历成本。 清洁感测分段搜索与轨迹生成: Phi-A 搜索:在 3D 空间进行离散搜索,通过高效的提升映射函数将 3D 节点提升到 5 - DoF 相机配置,在每个扩展节点验证碰撞清除和 FoV 清洁度。 有界常数时间的遮挡感知姿态校正:当提升的配置被遮挡时,在截锥体半空间表示下局部校正俯仰和偏航,通过查询局部体素集和二分法找到最小扰动调整。 可见性缓存加速:使用量化键存储清洁感测结果,缓存命中可绕过 FoV 测试,提高重规划吞吐量。 轨迹生成:将找到的分段与视点集拼接成完整的修复路径,然后转换为满足高平滑度、避障和覆盖完整性的最小时间和动态可行轨迹。 高效插件系统集成:FC - Vision 设计为插件层,以最小接口升级现有系统,使其具有遮挡感知能力。采用滚动时域方式进行重规划,提取局部子路径进行修复,然后无缝拼接回原扫描计划。重规划在事件驱动下进行,同时有轻量级的定期刷新以保持与在线地图同步。



6. 实验结果
文章围绕 FC - Vision 展开了实验,评估其在不同环境下的性能,具体实验结果如下:
1. 实验设置
平台与参数:无人机搭载 3D LiDAR 和 RGB 相机,真实测试使用定制四旋翼平台,模拟使用 AirSim 物理模拟器。平台和传感器参数在模拟和真实飞行中保持一致,如无人机半径 0.2米、LiDAR 测量范围 15米、相机 FoV 为水平 80 度垂直 65 度、有效传感范围最大 7 米等。 算法参数:在线地图以 0.1米 分辨率的体素表示,安全裕度等于无人机半径,视点选择参数设为 5.0;Phi-A* 搜索中,搜索步长 0.1米,启发式权重 10.0,二分迭代限制 10 次;每个滚动时域重规划周期的视野为 10 米;模拟中最大线速度和角速度限制为 1.0米/秒 和 20度/秒,真实飞行中为 0.5米/秒 和 15度/秒。 基线方法:与先前用于航空 3D 扫描的障碍物自适应重规划策略(Colli - Free)进行比较,两种方法都通过插件策略集成到 FC - Planner 中。 评估指标:关注飞行效率和目标可见性,效率用飞行时间(FT)衡量,可见性用目标覆盖率(CR)和遮挡率(OR)量化,可见性调整效率(VaE)定义为结合了覆盖率、遮挡率和飞行时间的综合指标,并报告重规划计算延迟(CL)。
2. 模拟评估
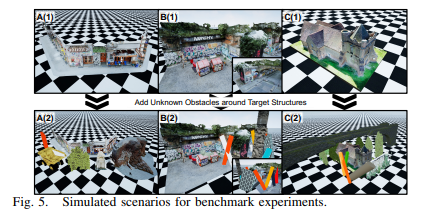
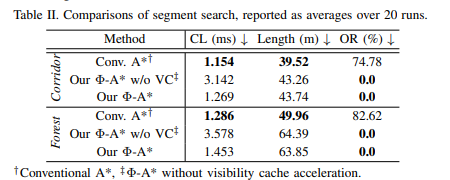
模拟环境:在 Kino Wall(KW)、Tunnel(TN)和 East Church(EC)三个具有挑战性的模拟场景中进行测试,模拟意外环境变化,每个场景进行 10 次独立试验。 对比分析: 结果对比:Colli - Free 虽能解决碰撞问题,但重规划段常使 FoV 被新引入的遮挡物阻挡,导致长遮挡帧序列和碎片化重建;FC - Vision 在重规划时明确执行全面和清晰的传感,调整位置和云台姿态以保持目标无遮挡,产生清晰帧和更完整的重建。 数据支持:FC - Vision 实现了近乎完全的覆盖,将遮挡率降至几乎为零,飞行时间增加有限(+6% - +38%),扫描质量(VaE)提高了数倍,重规划延迟低(22 - 27ms),满足实时要求。 Phi-A 有效性分析*: 对比结果:传统 A* 生成的连接段较短,但可见性严重下降(OR 为 74.78% 和 82.62%);Phi-A* 沿整个段执行无遮挡传感,在两个案例中 OR 均为 0,路径稍长;可见性缓存对实时性能至关重要,将 Phi-A* 的延迟从 3.14 - 3.58ms 降低到 1.27 - 1.45ms,接近传统 A*,同时保持严格的可见性保证。
3. 真实飞行测试
测试地点:在室内的矩形区域(Rect.)和房间两个真实世界地点进行全自主扫描飞行。 测试结果: 定性对比:Colli - Free 虽保持碰撞安全,但重规划轨迹常使相机对准非目标元素,导致视野严重受阻和重建不完整;FC - Vision 主动绕过新出现的障碍物并调整相机方向,保持无遮挡的目标观察,产生清晰帧和更完整的表面。 数据支持:FC - Vision 实现了更高的覆盖率和近乎零的遮挡率,整体任务质量(VaE)大幅提高,飞行时间适度增加,重规划延迟在边缘设备上较低(约 30Hz)。




7. 总结 & 未来工作
总结
本文提出了 FC - Vision,这是一个实时感知可见性的重新规划框架,可在未知、杂乱的环境中实现对目标结构的无遮挡和安全的空中扫描。该框架没有将感知作为无碰撞导航的副产品,而是将目标可见性作为明确约束,并通过两级分解实现低延迟重新规划:
(1)高效的无遮挡视点修复,在最小偏离标称扫描意图的同时保留预期覆盖范围; (2)在 5 自由度表示中进行清洁感知的线段搜索,以适度的开销确保线段沿线的视角级清洁性,并保证有足够的安全间隙。
此外,作者还提供了一种无缝集成策略,可在现有空中扫描系统上进行插件式部署。大量的模拟和实际飞行结果证明了该方法的有效性、实用性和高效性。
未来展望
未来的工作将扩展这个框架,以处理更多动态场景和语义感知目标,可能通过端到端学习来实现。
本文仅做学术分享,如有侵权,请联系删文。
。




添加微信:cv3d001,备注:姓名+方向+单位,邀请入群。