1.产品简介
DriveBot-Q1智能无人车是一款专为高校科研设计的多功能无人车,采用阿克曼车辆底盘,集成计算平台、车辆控制单元(VCU)、单线/多线激光雷达、单目相机、IMU和GNSS等硬件。
DriveBot-Q1智能无人车所有传感器经过严格时间同步,支持点云建图、避障、激光定位、决策规划和控制等功能,实现自主导航。实物图如图1所示。
该无人车具备高精度厘米级定位能力,可构建兼容室内外环境的协同智能系统。经过代码精简,系统兼具易用性、可扩展性和兼容性,非常适合SLAM算法研究、无人驾驶开发等科研方向。如图2所示。

2.功能和特点
DriveBot-Q1智能无人车功能如表1所示。

3.产品参数
DriveBot-Q1智能无人车参数如表2所示。

4.产品规格
DriveBot-Q1智能无人车规格(或发货清单)如表3所示。

DriveBot-Q1智能无人车发货清单如图3所示。

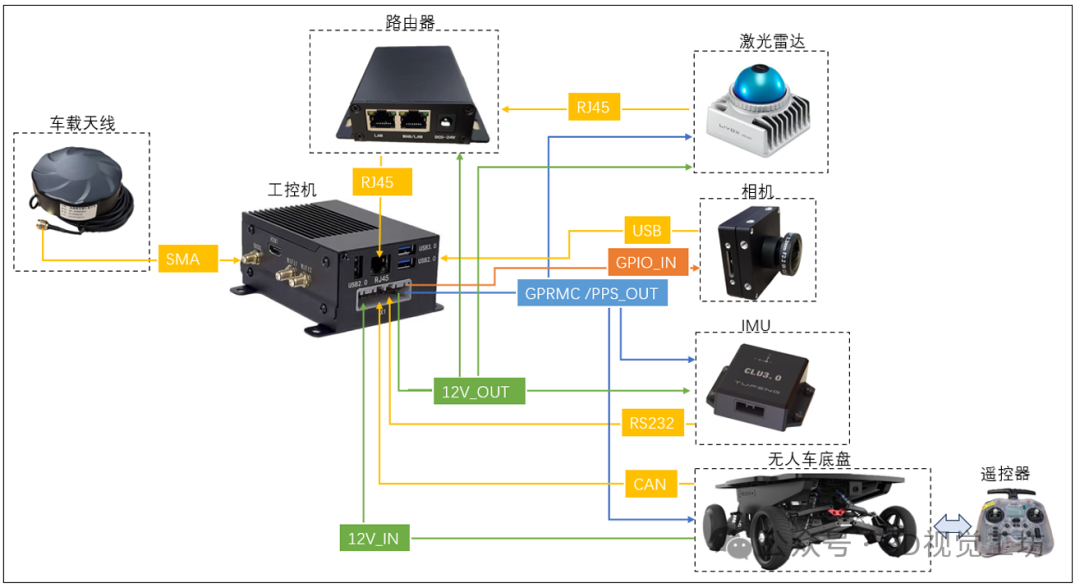
5.整车配置
DriveBot-Q1智能无人车整车配置如图4所示,由高精度有源车载天线、IMU,Livox MID360激光雷达、工业级相机和双频工业路由器组成,定制适配的无人车底盘,搭建出一套完整的无人车硬件系统。
6.硬件说明
接下来主要介绍无人车所使用到的硬件设备的技术参数,无人车硬件分为上装和底盘,上装硬件设备包括工控机、相机、激光雷达、IMU、高精度有源车载天线等。上装和底盘硬件参数如表3~4所示。


7. 产品功能
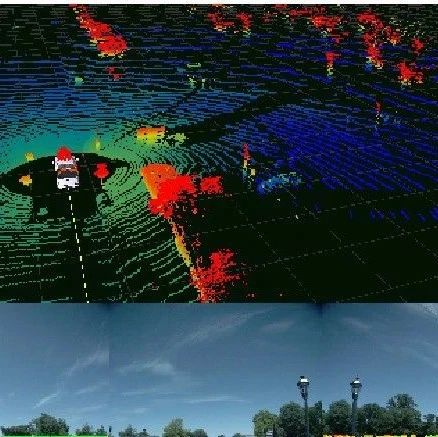
DriveBot-Q1智能无人车融合里程计、IMU、相机以及激光雷达,可以实现室内SLAM、多目标点导航、路径规划、自主避障等功能。其在室内外场景中均适用,值得注意的是:
当用于户外实验场地时尽可能找一些空旷无遮挡位置,这样GPS/RTK搜星质量好,定位效果更佳; 长时间在炎热的室外或者夏季阳光直晒的环境下,激光雷达由于温度过高,会导致无法正常工作,建议在天气凉爽室外条件下进行室外导航避障实验; DriveBot-Q1智能无人车提供的功能demo均在我们的实验条件下验证完毕,在不同的环境中表现会有一定的出入,针对具体场景的优化工作需要您进一步开发。
DriveBot-Q1智能无人车效果如图5~6所示。


8. 答疑服务
一年答疑服务。每个购买本产品的客户,我们将会拉一个微信答疑群,有问题可以随时群里交流。问题可以涵盖本套硬件和代码方方面面的问题。
9. 购买本套硬件,配套课程视频教程
通过本课程,学员将学会从零搭建一套完整的自动驾驶系统,掌握从环境搭建、传感器驱动、SLAM建图、定位导航到运动控制的全栈技术,最终实现小车自主导航。
课程《从零搭建一套自动驾驶小车源码实战教程》,大纲如下:



10. 产品采购渠道
 扫码可查看DriveBot-Q1智能无人车
扫码可查看DriveBot-Q1智能无人车
 扫码添加助理:cv3d001 或电话:13451707958
扫码添加助理:cv3d001 或电话:13451707958