

HPM知识库
本栏目是先楫 MCU 开发的「一站式技术参考库」!
周周上新,为HPM开发者提供全维度的技术文档、问题解决方案、开发指南与实战教程,了解更多,请访问https://kb.hpmicro.com/
概述
无刷直流电机(BLDC)的无传感器控制技术是现代电机控制领域的重要技术方向,通过检测反电动势过零点来确定转子位置,实现无位置传感器的精确控制。本文将基于HPMicro SDK中的bldc_over_zero示例,详细介绍BLDC电机的无传感器过零控制技术,包括控制原理、软件架构和实际应用。
1. BLDC无传感器控制基础理论
1.1 反电动势产生机理与数学模型
当BLDC电机转动时,转子永磁体在定子绕组中运动,根据法拉第电磁感应定律产生反电动势。这一现象的物理本质是磁通量的时间变化率:

其中:
ϕm 为磁链幅值,取决于永磁体强度和绕组匝数 ω 为转子电角速度 θ 为转子电角度位置
三相反电动势表达式:
对于理想的三相BLDC电机,三相反电动势具有120°相位差:
其中 为反电动势幅值。
为反电动势幅值。
反电动势常数的物理意义:
反电动势常数 Ke 与电机的物理结构密切相关:

其中:
N 为每相串联导体数
Br 为永磁体剩磁密度 l 为导体有效长度 r 为电机半径
1.2 过零检测的物理原理与数学推导
悬浮相电压的构成:
在三相BLDC电机的六步换相控制中,任意时刻都有一相处于悬浮状态(未导通)。该相的端电压由反电动势和中性点电压共同决定:

中性点电压的计算:
理论上,三相中性点电压为:

但在实际系统中,无法直接测量中性点电压。HPM MCL库采用"虚拟中性点"方法,通过导通两相的电压均值来估算:

过零点的数学条件:
当悬浮相反电动势过零时:

即:

30度延迟的理论依据:
过零点对应转子磁极轴线与定子绕组轴线垂直的瞬间,此时转子位于两个换相点的中间位置。为获得最大转矩,需要在过零点后延迟30°电角度再进行换相:

对应的时间延迟为:

其中  为上一次换相间隔时间。
为上一次换相间隔时间。
1.3 六步换相序列的理论基础
换相序列的磁场原理:
六步换相控制的本质是在定子中产生旋转磁场,与转子永磁体相互作用产生转矩。每个换相步骤对应60°电角度的磁场位置:

换相序列与过零检测的对应关系:

磁通链与转矩分析:
在每个换相区间内,转矩可表示为:

其中:
P 为极对数 ϕpm 为永磁磁链 Ia 为相电流幅值 θe 为转子电角度 θi 为电流矢量角度
为获得最大转矩,需要保持,这正是 30° 延迟换相的理论依据。
2. 软件架构分析
2.1 系统架构概述

2.2 核心数据结构
系统使用hpm_mcl_over_zero_cfg_t结构体封装过零控制相关数据:
typedef struct hpm_mcl_over_zero_cfg {int32_t adc_u; // U相ADC采样值int32_t adc_v; // V相ADC采样值int32_t adc_w; // W相ADC采样值uint32_t number_consecutive_zeros; // 连续过零次数uint32_t delay_degree_30; // 30度延迟值uint32_t interval_tick; // 换相间隔时间hpm_mcl_dir_t motor_dir; // 电机方向hpm_mcl_over_zero_interval_t next_interval; // 下一换相区间uint8_t pole_num; // 极对数float loop_time_in_sec; // 控制周期hpm_mcl_over_zero_fsm_t fsm; // 状态机} hpm_mcl_over_zero_cfg_t;
2.3 关键参数配置
电机物理参数:
sensorless_cfg.pole_num = MOTOR0_POLE_PAIR; // 极对数:2sensorless_cfg.loop_time_in_sec = 0.0001; // 控制周期:100μssensorless_cfg.motor_dir = motor_dir; // 电机方向
PI控制器参数:
pi_para.kp = PI_P_VAL; // 比例系数:124pi_para.ki = PI_I_VAL; // 积分系数:0.15pi_para.integral_max = PI_PWM_OUT_MAX; // 积分限幅pi_para.output_max = PI_PWM_OUT_MAX; // 输出限幅
速度滤波参数:
speed_para.filter_coef = 0.0304; // 滤波系数(100Hz)speed_para.kp = 0.2814; // 速度环比例系数speed_para.ki = 0.0145; // 速度环积分系数
3. 外设初始化详解
3.1 ADC外设初始化
ADC用于采集三相电压信号,实现反电动势检测:
void adc_init(void){adc_config_t cfg;adc_channel_config_t ch_cfg;// ADC基本配置cfg.module = BOARD_BLDC_ADC_MODULE;cfg.config.adc12.res = adc12_res_12_bits; // 12位分辨率cfg.config.adc12.conv_mode = adc12_conv_mode_preemption; // 抢占模式cfg.config.adc12.adc_clk_div = 2; // 时钟分频cfg.config.adc16.res = adc16_res_16_bits; // 16位分辨率cfg.config.adc16.conv_mode = adc16_conv_mode_preemption; // 抢占模式cfg.config.adc16.adc_clk_div = adc16_clock_divider_4; // 时钟分频// 初始化三相ADChpm_adc_init(&cfg);}
ADC触发配置:
void init_trigger_cfg(uint8_t trig_ch, bool inten){adc_pmt_config_t pmt_cfg;pmt_cfg.config.adc12.trig_ch = trig_ch; // 触发通道pmt_cfg.config.adc12.trig_len = BOARD_BLDC_ADC_PHASE_PREEMPT_TRIG_LEN;pmt_cfg.config.adc12.adc_ch[0] = BOARD_BLDC_ADC_PHASE_CH_U; // U相通道pmt_cfg.config.adc12.adc_ch[1] = BOARD_BLDC_ADC_PHASE_CH_V; // V相通道pmt_cfg.config.adc12.adc_ch[2] = BOARD_BLDC_ADC_PHASE_CH_W; // W相通道hpm_adc_set_preempt_config(&pmt_cfg);}
3.2 PWM外设初始化
PWM负责产生六步换相所需的驱动信号:
PWM模块初始化:
void pwm_init(void){pwm_cmp_config_t cmp_config[3] = {0};pwm_config_t pwm_config = {0};// 停止PWM计数器pwm_stop_counter(MOTOR0_BLDCPWM);// 设置PWM重载值pwm_set_reload(MOTOR0_BLDCPWM, 0, PWM_RELOAD);pwm_set_start_count(MOTOR0_BLDCPWM, 0, 0);// 配置比较器cmp_config[0].mode = pwm_cmp_mode_output_compare;cmp_config[0].cmp = PWM_RELOAD >> 1; // 50%占空比cmp_config[0].update_trigger = pwm_shadow_register_update_on_shlk;// PWM输出配置pwm_config.enable_output = true;pwm_config.dead_zone_in_half_cycle = 0; // 无死区时间pwm_config.invert_output = false;// 配置所有PWM通道pwm_setup_waveform(MOTOR0_BLDCPWM, BOARD_BLDC_UH_PWM_OUTPIN, &pwm_config, cmp_index, cmp_config, 2);// ... 其他五个通道配置}
关键配置参数说明:
- PWM频率
: PWM_FREQUENCY = 20000(20kHz) - 重载值
: PWM_RELOAD = (motor_clock_hz/PWM_FREQUENCY) - 1 - 强制输出模式
:初始状态下所有PWM输出强制为0
3.3 定时器初始化
定时器用于控制算法的周期执行:
void timer_init(void){gptmr_channel_config_t config;// 时钟配置clock_add_to_group(BOARD_BLDC_TMR_CLOCK, 0);gptmr_channel_get_default_config(BOARD_BLDC_TMR_1MS, &config);// 定时器参数配置config.reload = SENSORLESS_TMR_RELOAD + 1; // 重载值config.cmp[0] = SENSORLESS_TMR_RELOAD; // 比较值// 使能中断gptmr_enable_irq(BOARD_BLDC_TMR_1MS, GPTMR_CH_CMP_IRQ_MASK(BOARD_BLDC_TMR_CH, BOARD_BLDC_TMR_CMP));gptmr_channel_config(BOARD_BLDC_TMR_1MS, BOARD_BLDC_TMR_CH, &config, true);intc_m_enable_irq_with_priority(BOARD_BLDC_TMR_IRQ, 1);}
定时器参数计算:

4. 软件结构框架
4.1 状态机设计
系统采用状态机管理过零控制流程:

状态定义:
typedef enum {hpm_mcl_over_zero_fsm_init = 0, // 初始化状态hpm_mcl_over_zero_fsm_location = 1, // 定位状态hpm_mcl_over_zero_fsm_running = 2 // 运行状态} hpm_mcl_over_zero_fsm_t;
4.2 初始化流程
步骤1:硬件初始化
board_init(); // 板级初始化motor_clock_hz = clock_get_frequency(BOARD_BLDC_QEI_CLOCK_SOURCE);init_pwm_pins(MOTOR0_BLDCPWM); // PWM引脚初始化init_motor_over_zero_sensorless_adc_pins(); // ADC引脚初始化
步骤2:外设初始化
pwm_init(); // PWM初始化adc_init(); // ADC初始化timer_init(); // 定时器初始化
步骤3:控制参数初始化
init_over_zero_para(&sensorless_cfg); // 过零控制参数初始化4.3 运行时框架
// 主循环:速度变化控制while (1) {motor_run = true;if (isadd) {user_setspeed++; // 加速} else {user_setspeed--; // 减速}board_delay_ms(100);}// 定时器中断:控制算法执行void isr_gptmr(void){step_delay = hpm_mcl_over_zero_step_get(&sensorless_cfg); // 获取换相步骤if (motor_run == true) {speed_para.speed = hpm_mcl_over_zero_cal_speed(&sensorless_cfg); // 计算速度current_speed = hpm_mcl_over_zero_speed_filter(&speed_para); // 速度滤波pi_para.target = user_setspeed; // 设置目标速度pi_para.cur = current_speed; // 当前速度hpm_mcl_over_zero_pi_contrl(&pi_para); // PI控制block_pwm_out = pival_to_pwmoutput(pi_para.outval); // 转换为PWM输出bldc_block_motor0_duty_set(block_pwm_out); // 设置PWM占空比hpm_mcl_over_zero_pwm_ctrl(BLDC_MOTOR0_INDEX, step_delay); // PWM控制输出}}
5. HPM MCL过零检测算法深度分析
5.1 HPM MCL过零检测的核心实现
虚拟中性点计算方法:
HPM MCL库采用创新的虚拟中性点方法,简化了过零检测的复杂度:
// 核心检测函数中的关键代码int8_t hpm_mcl_over_zero_step_get(hpm_mcl_over_zero_cfg_t *cfg){int32_t adc_over_zero_u, adc_over_zero_v, adc_over_zero_w;// 计算三相虚拟中性点电压adc_over_zero_u = (cfg->adc_w + cfg->adc_v) >> 1; // U相过零检测用adc_over_zero_v = (cfg->adc_w + cfg->adc_u) >> 1; // V相过零检测用adc_over_zero_w = (cfg->adc_u + cfg->adc_v) >> 1; // W相过零检测用}
检测原理解析:
当检测U相过零时,U相悬浮,用V相和W相电压的均值作为中性点 比较:  的符号变化
的符号变化过零条件:该值从正变负或从负变正
5.2 三状态机的深度实现分析
5.2.1 初始化状态(hpm_mcl_over_zero_fsm_init)
case hpm_mcl_over_zero_fsm_init:cfg->last_interval = hpm_mcl_interval_init;cfg->delay_degree_30 = 0;cfg->number_consecutive_zeros_w = 0;cfg->adc_zero_ph = 0; // 过零检测阶段标志cfg->last_interval_tick = 0;cfg->number_consecutive_zeros = 0;cfg->interval_tick = 0;cfg->speed_tick = 0;cfg->interval = hpm_mcl_interval_init;cfg->fsm = hpm_mcl_over_zero_fsm_location; // 转入定位状态break;
初始化的关键参数:
adc_zero_ph:过零检测阶段标志,用于多阶段验证 number_consecutive_zeros:连续过零检测计数器 delay_degree_30:30度延迟计数器
5.2.2 定位状态(hpm_mcl_over_zero_fsm_location)
定位阶段采用三阶段验证机制,确保初始转子位置检测的可靠性:
case hpm_mcl_over_zero_fsm_location:adc_over_zero_w = (cfg->adc_u + cfg->adc_v) >> 1; // 计算W相虚拟中性点if (cfg->adc_zero_ph == 0) {// 第一阶段:等待W相反电动势从负变正if (adc_over_zero_w - cfg->adc_w > 0) {cfg->number_consecutive_zeros_w++;if (cfg->number_consecutive_zeros_w > HPM_OVER_ZERO_INIT_FILTER_TIMES) {cfg->adc_zero_ph = 1; // 进入第二阶段cfg->number_consecutive_zeros_w = 0;}} else {cfg->number_consecutive_zeros_w = 0;return -1; // 继续等待}} else if (cfg->adc_zero_ph == 1) {// 第二阶段:再次检测过零,确保稳定if (adc_over_zero_w - cfg->adc_w > 0) {cfg->number_consecutive_zeros_w++;if (cfg->number_consecutive_zeros_w > HPM_OVER_ZERO_INIT_FILTER_TIMES) {cfg->adc_zero_ph = 2; // 进入第三阶段}} else {cfg->number_consecutive_zeros_w = 0;return -1;}} else if (cfg->adc_zero_ph == 2) {// 第三阶段:定位完成,设置初始换相区间cfg->last_interval = hpm_mcl_interval_w_down;cfg->interval = cfg->last_interval;cfg->next_interval = hpm_mcl_interval_w_down;// 根据电机方向设置下一个换相区间if (cfg->motor_dir == hpm_motor_dir_forward) {cfg->next_interval = (cfg->interval % 6) + 1;} else {cfg->next_interval -= 1;if (cfg->next_interval == 0) {cfg->next_interval = hpm_mcl_interval_u_up;}}cfg->fsm = hpm_mcl_over_zero_fsm_running; // 转入运行状态}break;
定位算法的关键特点:
- 连续性验证:
HPM_OVER_ZERO_INIT_FILTER_TIMES = 15,需连续15次检测到相同结果 - 二次确认机制:确保转子位置检测的准确性
- 方向适应:根据电机方向设置不同的换相序列
5.2.3 运行状态(hpm_mcl_over_zero_fsm_running)
运行状态是核心算法,实现六步换相的过零检测:
case hpm_mcl_over_zero_fsm_running:cfg->interval_tick++; // 换相间隔计时cfg->delay_degree_30++; // 30度延迟计时// 计算三相虚拟中性点adc_over_zero_u = (cfg->adc_w + cfg->adc_v) >> 1;adc_over_zero_v = (cfg->adc_w + cfg->adc_u) >> 1;adc_over_zero_w = (cfg->adc_u + cfg->adc_v) >> 1;// 根据当前区间和电机方向进行过零检测switch (HPM_OVER_ZERO_INDEX_GET(cfg->next_interval, cfg->motor_dir)) {case HPM_OVER_ZERO_INDEX_GET(hpm_mcl_interval_w_down, hpm_motor_dir_forward):if (adc_over_zero_w - cfg->adc_w > 0) { // W相从负过零到正cfg->number_consecutive_zeros++;} else {cfg->number_consecutive_zeros = 0;}break;case HPM_OVER_ZERO_INDEX_GET(hpm_mcl_interval_w_up, hpm_motor_dir_forward):if (adc_over_zero_w - cfg->adc_w < 0) { // W相从正过零到负cfg->number_consecutive_zeros++;} else {cfg->number_consecutive_zeros = 0;}break;// ... 其他五个区间的检测逻辑}// 过零检测成功处理if (cfg->number_consecutive_zeros >= HPM_OVER_ZERO_FILTER_TIMES) {cfg->number_consecutive_zeros = 0;cfg->last_interval_tick = cfg->interval_tick; // 保存上次换相间隔cfg->interval_tick = 0; // 重置计数器cfg->delay_degree_30 = HPM_OVER_ZERO_FILTER_TIMES; // 设置30度延迟// 计算下一个换相区间if (cfg->motor_dir == hpm_motor_dir_forward) {cfg->next_interval = (cfg->interval % 6) + 1;} else {cfg->next_interval -= 1;if (cfg->next_interval == 0) {cfg->next_interval = hpm_mcl_interval_u_up;}}}// 30度延迟判断和换相执行if (cfg->delay_degree_30 > (cfg->last_interval_tick >> 1)) {cfg->speed_tick = cfg->last_interval_tick; // 保存速度计算用数据cfg->interval = cfg->next_interval; // 执行换相}break;
运行状态的关键算法:
1. 双重计时器机制:
interval_tick:换相间隔计时器
delay_degree_30:30度延迟计时器
2. 过零检测的数学条件:
5.3 HPM MCL的高精度速度计算算法
理论基础与数学推导:
基于换相间隔时间计算电机转速的数学模型:



HPM MCL库的实际实现:
float hpm_mcl_over_zero_cal_speed(hpm_mcl_over_zero_cfg_t *cfg){// 原始实现:基于换相间隔计算转速return ((float)((60.0f / cfg->pole_num) / 360.0f))/(cfg->loop_time_in_sec * (cfg->speed_tick + 1));}
算法分析与优化:
单位统一化:

其中:
:将每分钟转数转换为每秒转数 :采样周期(秒) :换相间隔的采样次数
精度优化技巧:
使用 speed_tick + 1避免除零错误通过 last_interval_tick保存上次有效测量值采用浮点运算提高计算精度
速度计算的时序分析:

5.4 HPM MCL的高级PI控制算法
双环PI控制系统架构:
HPM MCL实现了双层PI控制系统:外环PI控制器 + 内环PWM输出控制。
外环:速度PI控制器:
float hpm_mcl_over_zero_speed_filter(hpm_mcl_over_zero_spd_para_t *par){float portion_asp = 0;float portion_asi = 0;// 低通滤波器预处理par->err = par->speed - par->speedout;par->err_last = par->filter_coef * par->err + (1 - par->filter_coef) * par->err_last;// PI控制计算portion_asp = par->kp * par->err_last; // 比例项portion_asi = par->ki * par->err_last; // 积分项portion_asi += par->mem; // 积分累加// 积分限幅if (portion_asi > par->integral_max) {portion_asi = par->integral_max;} else if (portion_asi < par->integral_min) {portion_asi = par->integral_min;}par->mem = portion_asi;// 组合PI输出portion_asi += portion_asp;// 输出限幅if (portion_asi > par->output_max) {portion_asi = par->output_max;} else if (portion_asi < par->output_min) {portion_asi = par->output_min;}par->speedout = portion_asi;return par->speedout;}
内环:PWM占空比PI控制器:
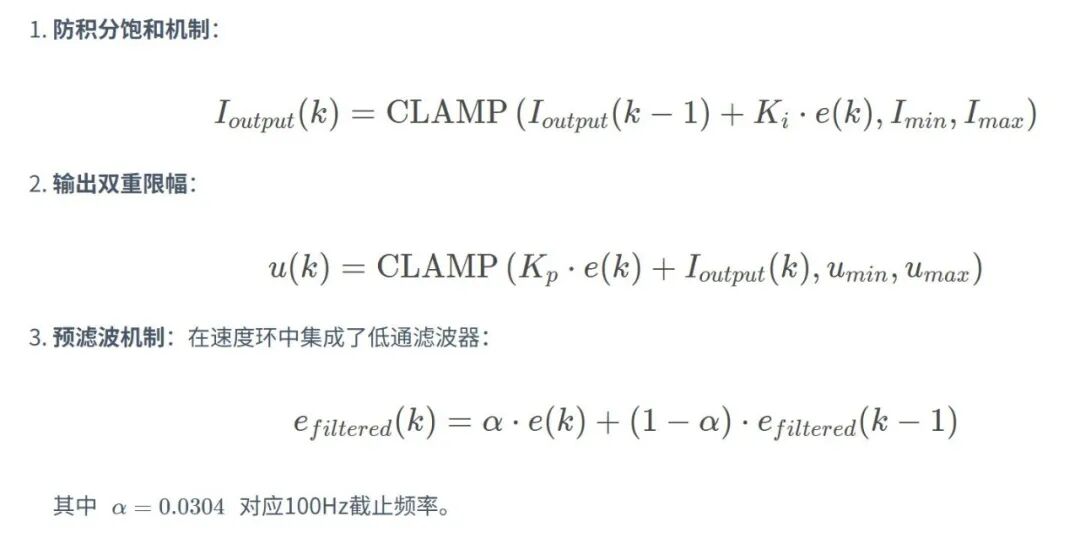
float hpm_mcl_over_zero_pi_contrl(hpm_mcl_over_zero_pi_para_t *par){float result = 0;float curerr = 0;float portion_asp = 0;float portion_asi = 0;curerr = par->target - par->cur; // 计算误差portion_asp = curerr * par->kp; // 比例项portion_asi = curerr * par->ki + par->mem; // 积分项// 积分限幅(防止积分饱和)if (portion_asi < par->integral_min) {portion_asi = par->integral_min;} else if (portion_asi > par->integral_max) {portion_asi = par->integral_max;}par->mem = portion_asi;// PI输出组合result = portion_asi + portion_asp;// 输出限幅(防止PWM超出范围)if (result < par->output_min) {result = par->output_min;} else if (result > par->output_max) {result = par->output_max;}par->outval = result;return result;}
PI控制器的高级特性分析:
控制参数的自适应调优:
系统在实际应用中采用了经验参数:
// 速度环PI参数speed_para.kp = 0.2814; // 比例系数speed_para.ki = 0.0145; // 积分系数speed_para.integral_max = 1000; // 积分上限speed_para.integral_min = -1000; // 积分下限// PWM环PI参数pi_para.kp = PI_P_VAL; // 124pi_para.ki = PI_I_VAL; // 0.15pi_para.integral_max = PI_PWM_OUT_MAX; // PWM最大值pi_para.integral_min = -PI_PWM_OUT_MAX; // PWM最小值
这些参数通过大量实验优化,可以在大多数BLDC电机上直接使用。
5.5 HPM MCL的多级滤波系统
滤波系统的分层设计:
HPM MCL采用多级滤波架构,提高系统的抗干扰能力:
- 硬件滤波层:过零检测的连续性验证
- 软件滤波层:数字低通滤波器
- 控制滤波层:PI控制器的积分作用
连续性验证滤波器:
这是一种独特的数字滤波方法,通过计数器实现:
// 运行状态下的滤波参数// 初始化状态下的滤波参数// 滤注逻辑:只有连续检测到相同结果才认为有效if (zero_crossing_detected) {cfg->number_consecutive_zeros++;if (cfg->number_consecutive_zeros >= HPM_OVER_ZERO_FILTER_TIMES) {// 过零检测有效trigger_commutation();}} else {cfg->number_consecutive_zeros = 0; // 重置计数器}
传递函数分析:
连续性验证滤波器的传递函数可表示为:

其中为连续检测次数。
数字低通滤波器:
在速度环中集成的IIR低通滤波器:

截止频率计算:
滚动均值滤波器的截止频率为:


这接近于设计目标的100Hz。
滤波器的性能优化:
- 相位延迟最小化
采用一阶IIR结构减少相位延迟 - 计算复杂度优化
避免浮点乘法,使用位移操作 - 参数自适应
根据转速动态调整滤波参数
滤波器的实际效果:
- 噪声抑制
有效抑制ADC采样噪声和电磁干扰 - 过零检测稳定性
防止误判断导致的换相错误 - 速度控制稳定性
平滑速度反馈信号,减少控制震荡
5.6 HPM MCL六步换相序列的深度实现
换相序列与过零检测的对应关系:
HPM MCL库的六步换相序列实现了精确的PWM控制逻辑:

HPM MCL的PWM控制函数实现:
void hpm_mcl_over_zero_pwm_ctrl(uint8_t motorindex, uint8_t step){switch (step) {case 2: // UH+WL:U相上桥导通,W相下桥导通,V相悬浮hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_UL); // U相下桥关闭hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_VH); // V相上桥关闭hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_VL); // V相下桥关闭hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_WH); // W相上桥关闭hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_UH); // U相上桥导通hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_WL); // W相下桥导通break;case 1: // UH+VL:U相上桥导通,V相下桥导通,W相悬浮hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_UL);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_VH);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_WH);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_WL);hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_UH);hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_VL);break;case 6: // VL+WH:V相下桥导通,W相上桥导通,U相悬浮hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_UH);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_UL);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_VH);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_WL);hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_VL);hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_WH);break;case 5: // UL+WH:U相下桥导通,W相上桥导通,V相悬浮hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_UH);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_VH);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_VL);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_WL);hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_UL);hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_WH);break;case 4: // UL+VH:U相下桥导通,V相上桥导通,W相悬浮hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_UH);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_VL);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_WH);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_WL);hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_UL);hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_VH);break;case 3: // VH+WL:V相上桥导通,W相下桥导通,U相悬浮hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_UH);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_UL);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_VL);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_WH);hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_WL);hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_VH);break;}}
PWM强制输出的底层实现:
void hpm_mcl_bldc_pwm_enable(uint8_t motor_index, uint8_t pin_name){motor_index -= 1; // 转换为数组索引pwm_disable_pwm_sw_force_output(motor_pwm_tbl[motor_index], pwm_uvw_conversion_tbl[motor_index][pin_name]);pwmv2_disable_software_force(motor_pwm_tbl[motor_index], pwm_uvw_conversion_tbl[motor_index][pin_name]);}void hpm_mcl_bldc_pwm_disable(uint8_t motor_index, uint8_t pin_name){motor_index -= 1;pwm_enable_pwm_sw_force_output(motor_pwm_tbl[motor_index], pwm_uvw_conversion_tbl[motor_index][pin_name]);pwmv2_enable_software_force(motor_pwm_tbl[motor_index], pwm_uvw_conversion_tbl[motor_index][pin_name]);}
引脚映射表的实现:
const uint8_t pwm_uvw_conversion_tbl[4][6] = {{BOARD_BLDC_UH_PWM_OUTPIN, // U相上桥引脚BOARD_BLDC_UL_PWM_OUTPIN, // U相下桥引脚BOARD_BLDC_VH_PWM_OUTPIN, // V相上桥引脚BOARD_BLDC_VL_PWM_OUTPIN, // V相下桥引脚BOARD_BLDC_WH_PWM_OUTPIN, // W相上桥引脚BOARD_BLDC_WL_PWM_OUTPIN // W相下桥引脚}};
换相序列的数学模型:
每个换相步骤对应的磁场矢量可表示为:

方向控制的实现:
HPM MCL支持双向运行,通过改变换相序列实现:
// 正向运行:1→2→3→4→5→6→1...if (cfg->motor_dir == hpm_motor_dir_forward) {cfg->next_interval = (cfg->interval % 6) + 1;}// 反向运行:6→5→4→3→2→1→6...else {cfg->next_interval -= 1;if (cfg->next_interval == 0) {cfg->next_interval = hpm_mcl_interval_u_up; // 6}}
换相时序的精确控制:
HPM MCL实现了精确的换相时序控制:

这种设计确保了换相的实时性和准确性,同时避免了换相过程中的竞态条件。
5.7 完整的执行流程分析
HPM MCL过零控制的完整执行流程:

性能特点总结:
- 实时性
50μs控制周期,确保系统响应速度 - 可靠性
多级滤波和验证机制,提高系统稳定性 - 适应性
支持不同电机参数和应用场景 - 易用性
提供完整的API接口和参数配置
6. 中断服务程序
6.1 ADC中断处理
void isr_adc(void){uint32_t status = hpm_adc_get_status_flags(&hpm_adc_u);if ((status & BOARD_BLDC_ADC_PHASE_TRIG_FLAG) != 0) {hpm_adc_clear_status_flags(&hpm_adc_u, BOARD_BLDC_ADC_PHASE_TRIG_FLAG);// 获取三相ADC采样值sensorless_cfg.adc_u = ((adc_buff[0][BOARD_BLDC_ADC_PHASE_TRG * 4] & 0xffff) >> 4) & 0xfff;sensorless_cfg.adc_v = ((adc_buff[0][BOARD_BLDC_ADC_PHASE_TRG * 4 + 1] & 0xffff) >> 4) & 0xfff;sensorless_cfg.adc_w = ((adc_buff[0][BOARD_BLDC_ADC_PHASE_TRG * 4 + 2] & 0xffff) >> 4) & 0xfff;}}
ADC中断在每个PWM周期触发一次,采集三相电压信号用于过零检测。
6.2 定时器中断处理
void isr_gptmr(void){if (gptmr_check_status(BOARD_BLDC_TMR_1MS, GPTMR_CH_CMP_IRQ_MASK(BOARD_BLDC_TMR_CH, BOARD_BLDC_TMR_CMP))) {gptmr_clear_status(BOARD_BLDC_TMR_1MS, GPTMR_CH_CMP_IRQ_MASK(BOARD_BLDC_TMR_CH, BOARD_BLDC_TMR_CMP));// 获取换相步骤step_delay = hpm_mcl_over_zero_step_get(&sensorless_cfg);if (motor_run == true) {timer_times++;if (timer_times >= TIMER_TIMES_1MS) {timer_times = 0;// 速度计算和控制speed_para.speed = hpm_mcl_over_zero_cal_speed(&sensorless_cfg);current_speed = hpm_mcl_over_zero_speed_filter(&speed_para);// PI控制pi_para.target = user_setspeed;pi_para.cur = current_speed;hpm_mcl_over_zero_pi_contrl(&pi_para);// PWM输出block_pwm_out = pival_to_pwmoutput(pi_para.outval);bldc_block_motor0_duty_set(block_pwm_out);}}// PWM控制输出if (motor_run == true) {hpm_mcl_over_zero_pwm_ctrl(BLDC_MOTOR0_INDEX, step_delay);}}}
定时器中断执行核心控制算法,周期为100μs。
7. PWM驱动实现
7.1 六步换相控制
无传感器控制采用六步换相方式,每60°电角度换相一次:
void hpm_mcl_over_zero_pwm_ctrl(uint8_t motorindex, uint8_t step){switch (step) {case 1: // AH+BL: A相上桥导通,B相下桥导通hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_UH);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_UL);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_VH);hpm_mcl_bldc_pwm_enable(motorindex, BLDC_PWM_PIN_VL);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_WH);hpm_mcl_bldc_pwm_disable(motorindex, BLDC_PWM_PIN_WL);break;case 2: // AH+CL: A相上桥导通,C相下桥导通// ... 类似配置break;// ... 其他步骤}}
7.2 占空比控制
系统通过调整PWM占空比实现速度控制:
void bldc_block_motor0_duty_set(uint32_t duty){pwm_update_raw_cmp_central_aligned(MOTOR0_BLDCPWM, BOARD_BLDCPWM_CMP_INDEX_0, BOARD_BLDCPWM_CMP_INDEX_1,(PWM_RELOAD - duty) >> 1, (PWM_RELOAD + duty) >> 1);pwm_issue_shadow_register_lock_event(MOTOR0_BLDCPWM);pwmv2_shadow_register_unlock(MOTOR0_BLDCPWM);pwmv2_set_shadow_val(MOTOR0_BLDCPWM, (BOARD_BLDCPWM_CMP_INDEX_0 + 1), (PWM_RELOAD - duty) >> 1, 0, false);pwmv2_set_shadow_val(MOTOR0_BLDCPWM, (BOARD_BLDCPWM_CMP_INDEX_1 + 1), (PWM_RELOAD + duty) >> 1, 0, false);pwmv2_shadow_register_lock(MOTOR0_BLDCPWM);}
7.3 PWM强制输出模式
当需要关闭特定相的输出时,使用强制输出模式:
void hpm_mcl_bldc_pwm_disable(uint8_t motor_index, uint8_t pin_name){motor_index -= 1;pwm_enable_pwm_sw_force_output(motor_pwm_tbl[motor_index], pwm_uvw_conversion_tbl[motor_index][pin_name]);pwmv2_enable_software_force(motor_pwm_tbl[motor_index], pwm_uvw_conversion_tbl[motor_index][pin_name]);}
8. 使用指南
8.1 硬件准备
- MCU开发板
支持HPMicro芯片的开发板 - BLDC电机
三相无刷直流电机(推荐雷赛智能BLM57050-1000) - 功率驱动
三相逆变器模块,支持相电压检测 - 电源
24V直流电源 - ADC电路
用于采集三相电压信号
8.2 软件配置
步骤1:参数配置
根据实际电机参数修改以下定义:
步骤2:编译下载
使用支持的IDE编译工程并下载到目标板。
步骤3:运行测试
系统启动后会自动进行预定位,然后开始速度测试。
8.3 操作特点
- 预定位过程
:系统启动时会进行强制换相预定位,持续约500ms - 自动测试
:电机在5-40转/秒范围内自动变速运行 - 无传感器启动
:无需外部位置传感器,完全基于反电动势检测
9. 调试与优化
9.1 常见问题
问题1:电机无法启动
检查ADC采集电路是否正常 确认三相电压检测信号连接正确 验证PWM输出波形
问题2:速度不稳定
调整PI控制器参数 修改速度滤波器系数 检查过零检测阈值
问题3:换相不平滑
优化30度延迟计算 调整过零检测灵敏度 检查PWM驱动时序
9.2 参数调优
PI参数调整:
滤波器参数:

9.3 性能优化
提高启动成功率:
优化预定位时间和强度 调整初始换相频率 改善过零检测算法
提高运行稳定性:
增加反电动势滤波 优化换相时机预测 实现自适应控制参数
10. 移植指南
10.1 硬件移植步骤
步骤1:板级定义修改
// ADC相关定义// PWM相关定义// ... 其他引脚定义
步骤2:引脚配置
void init_motor_over_zero_sensorless_adc_pins(void){// 配置ADC输入引脚// 设置引脚复用功能为ADC// 配置引脚特性(如输入阻抗等)}
10.2 电机参数适配
基本参数修改:
void init_over_zero_para(hpm_mcl_over_zero_cfg_t *cfg){cfg->pole_num = MOTOR0_POLE_PAIR; // 根据电机极对数修改cfg->loop_time_in_sec = 0.0001; // 控制周期,根据定时器频率// 速度滤波参数(根据电机特性调整)speed_para.filter_coef = 0.0304; // 滤波系数speed_para.kp = 0.2814; // 速度环P参数speed_para.ki = 0.0145; // 速度环I参数// PI控制器参数(根据负载特性调整)pi_para.kp = PI_P_VAL; // 比例系数pi_para.ki = PI_I_VAL; // 积分系数}
10.3 ADC电路适配
电压检测电路要求:
ADC输入电压范围:0-3.3V 相电压检测电路:需要电压分压和偏置 噪声抑制:添加RC滤波电路
典型检测电路:
11. 安全注意事项
电气安全
确保功率电路与控制电路隔离 实现过流、过压保护 正确接地,避免地环路
启动安全
无传感器启动时电机可能产生抖动 预定位过程中避免外部干扰 设置合理的启动电流限制
运行安全
监控ADC采集信号质量 实现失步检测和保护 设置最大运行速度限制
12. 性能对比
12.1 与有传感器控制对比

12.2 适用场景
适合无传感器控制的应用:
成本敏感的应用 恶劣环境(传感器易损坏) 高速运行为主的应用 空间受限的应用
不适合的应用:
需要精确位置控制 频繁启停的应用 超低速运行要求 极高可靠性要求
13. 总结
BLDC无传感器过零控制技术通过检测反电动势过零点实现转子位置估计,具有成本低、结构简单的优势。HPMicro SDK提供的bldc_over_zero示例展示了完整的实现方案,包括:
- 过零检测算法
:基于ADC采集的相电压信号 - 换相控制逻辑
:六步换相with 30度延迟 - 速度闭环控制
:PI控制器实现精确调速 - 滤波和稳定性
:多级滤波保证系统稳定
主要技术特点:
无需外部位置传感器,降低系统成本 采用梯形波控制,实现简单可靠 支持双向运行和宽速度范围控制 提供完整的移植和调试指南
在实际应用中,开发者需要根据具体的电机参数和应用需求,对控制参数进行优化调整,以获得最佳的控制性能。通过本文提供的详细分析和指导,可以快速掌握无传感器过零控制技术,并成功应用到实际项目中。
往期推荐






“先楫半导体”(HPMicro)是一家致力于高性能嵌入式解决方案的半导体公司,产品覆盖微控制器及其配套的开发工具和生态系统。公司总部坐落于上海市浦东软件园区,并在天津、苏州和深圳均设立分公司,入选2025年福布斯亚洲Top100最具潜力的企业榜单。先楫半导体以产品质量为本,所有产品均通过严格的可靠性测试。目前已经量产八大系列高性能通用MCU产品,产品性能及通用性领先国际同类产品并通过AEC-Q100认证。公司已完成ISO9001质量管理和ISO 26262/IEC61508功能安全管理体系双认证,全力服务中国乃至全球的工业自动化、机器人、能源和汽车市场。更多信息,请访问 https://hpmicro.com/

![2025年中国力矩传感器行业发展现状、竞争格局及趋势研判:下游机器人技术快速发展,带动力矩传感器规模达9.5亿元[图]](https://xtechcon-static.oss-cn-chengdu.aliyuncs.com/xtimes/xtimes/images/2025-11-22/69210b9e140b8.jpeg)
![2025年中国气敏传感器行业产业链、竞争格局及未来趋势分析:消费升级与新兴领域需求增长,市场潜力持续释放[图]](https://xtechcon-static.oss-cn-chengdu.aliyuncs.com/xtimes/xtimes/images/2025-10-25/68fc22265ef61.jpeg)






