【科技纵览】据IT之家4月4日报道,科技媒体Interesting Engineering当日刊文指出,美国亚利桑那州立大学研究团队成功开发出一种新型气动人工肌肉,显著突破了传统电机驱动系统在输出功率与灵活性方面的限制,使机器人具备举起相当于自身重量100倍物体的能力。
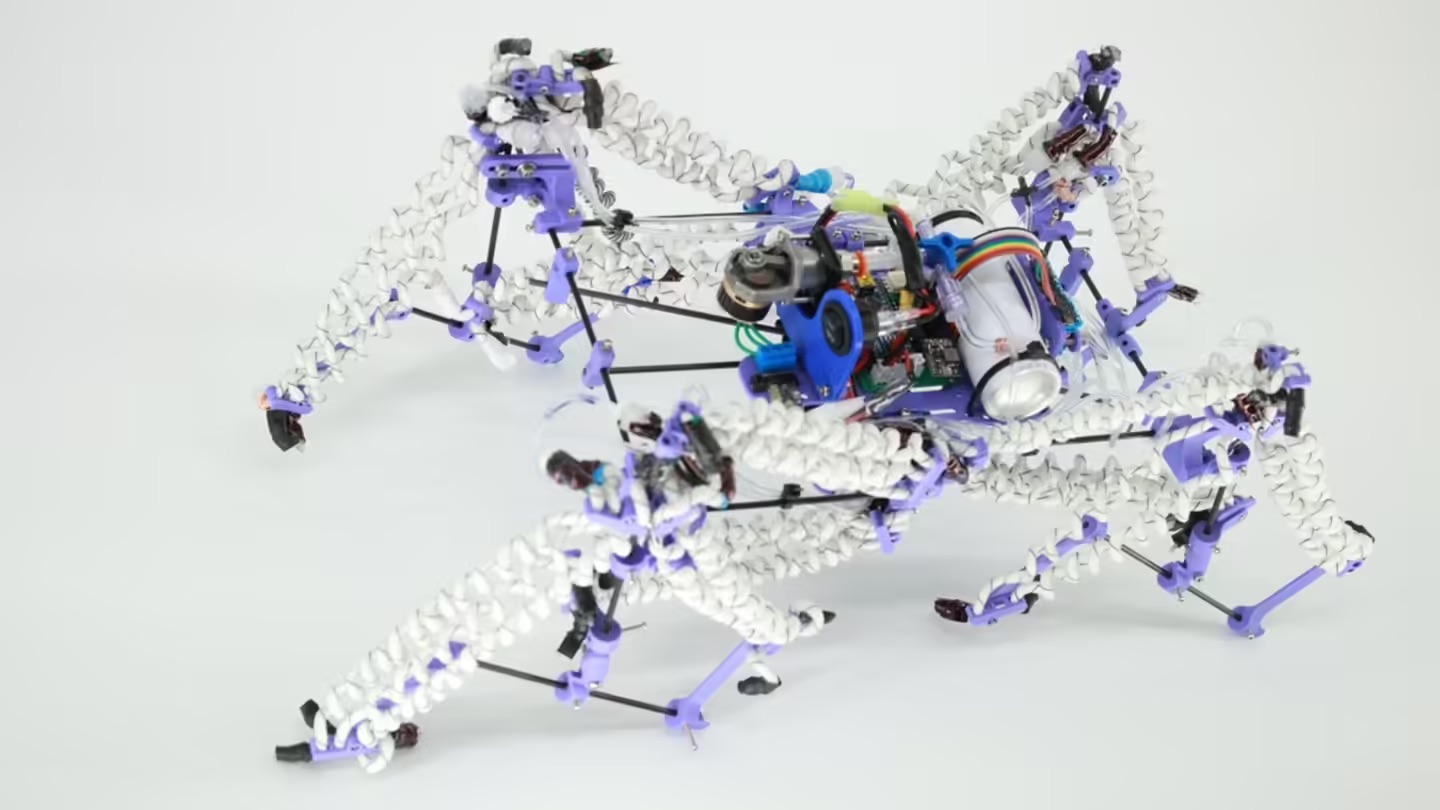
该研究项目由博士生埃里克·韦斯曼(Eric Weissman)主导,旨在解决现有刚性驱动装置的固有缺陷。相关论文已正式发表于权威期刊《美国国家科学院院刊》。其核心技术采用名为HARP(螺旋各向异性增强聚合物)的致动器,通过模拟生物肌肉的收缩与膨胀机制实现运动控制。韦斯曼将该结构描述为“类似空心螺旋意面”,仅需微量压缩空气即可完成高效伸缩动作。
相较于传统电机,这种人工肌肉展现出柔性高、重量轻及运行近乎无声等多重优势。其低气压驱动特性大幅降低能源依赖,使机器人可在无外接电源条件下自主移动。在极端环境适应性方面,该装置能在沸水温度及强腐蚀性介质中保持稳定工作性能,特别适合进入倒塌建筑等狭小或复杂空间执行搜救任务,且不会因刚性碰撞引发二次损害。
研究团队已验证多项应用场景:其一为仿象鼻设计的软体机械臂,可灵活绕过障碍物,适用于精密工业操作与安全人机协作;其二是一款可穿戴式背部助力装置,融合柔性材料与动态支撑调节功能,在确保舒适轻便的同时,显著缓解人体搬运重物时的负荷压力。
业内观察认为,此类软体驱动技术正加速从实验室走向产业化。除灾难应急响应外,该人工肌肉还可拓展至工业设备清洗、深海探测以及高温热泉区域的科学采样等领域。目前,团队已通过亚利桑那州立大学提交临时专利申请,并获得英伟达提供的学术研究资助,标志着该技术迈入商业化孵化阶段。