关注公众号,点击公众号主页右上角“ · · · ”,设置星标,实时关注旺材芯片最新资讯
混合键合技术:关键流程与精度控制
牛增渊,代江文,王成君,武振海
(中国电子科技集团公司第二研究所)
摘要:
混合键合,也被称为直接键合,是三维集成电路技术中的关键工艺之一,它能够在室温无中间介质的情况下实现晶圆间金属与金属以及电介质与电介质的键合。详细阐述了工艺流程,包括晶圆预处理、对准以及预键合。介绍了主流的设备结构以及晶圆对准方法。此外,还探讨了深亚百纳米对准的要求及应对策略,并分析了导致对准和预键合偏差的因素。这一全面的综述为混合键合技术及设备的发展与改进提供了宝贵的见解。
混合 键 合 , 也 被 称 为 直 接 键 合 , 是 一 种 在 晶圆间将金属与金属、电介质与电介质键合的过程,晶圆间没有中间介质,该键合过程在室温下进行。它可以有效改善传统键合过程中的高温高压造成的晶圆应力变形、键合力不均匀和工艺流程复杂等问题。混合键合已成为三维集成电路(Three-Dimensional Integrated Circuit, 3D IC)的关键技术之一,是一个需要更接近前段集成工艺(Front End Of the Line,FEOL)的高精度和高质量的先进技术领域[1-3]。
本文将着重介绍百纳米级精度的混合键合的工艺流程及键合生成原理、主流设备结构形式、晶圆对准方式。梳理晶圆键合的误差来源及成因,为亚百纳米和深亚百纳米晶圆混合键合设备及工艺的开发提供参考。
1 混合键合工艺流程
混合键合是通过两片晶圆表面的氢氧键形成范德华力,自发地使两片晶圆黏合在一起。为了诱导产生足够的范德华力,晶圆表面通常采用电化学抛光工艺(Chemical Mechanical Planarization,CMP),使晶圆表面粗糙度,即在1 μm×1 μm上测量的均方根(RMS),优于0.5 nm。对于12英寸晶圆,其厚度一致性(Total Thickness Variation,TTV)小于3 μm,晶圆翘曲度小于 30 μm(晶圆)[4-5]。
混合键合的工艺流程分为3部分:晶圆预处理、晶圆对准和晶圆预键合,如图1所示。预处理环节中,在晶圆表面活化处理完成后,进行兆声清洗。兆声清洗的目的有两个,第一是清洁晶圆表面,减少或者消除晶圆键合的不良,清洗至少要满足尺寸≥0.12 μm、颗粒少于 10 个的指标;第二是通过清洗在活化的晶圆表面生成氢氧键,实现晶圆的直接键合[6]。
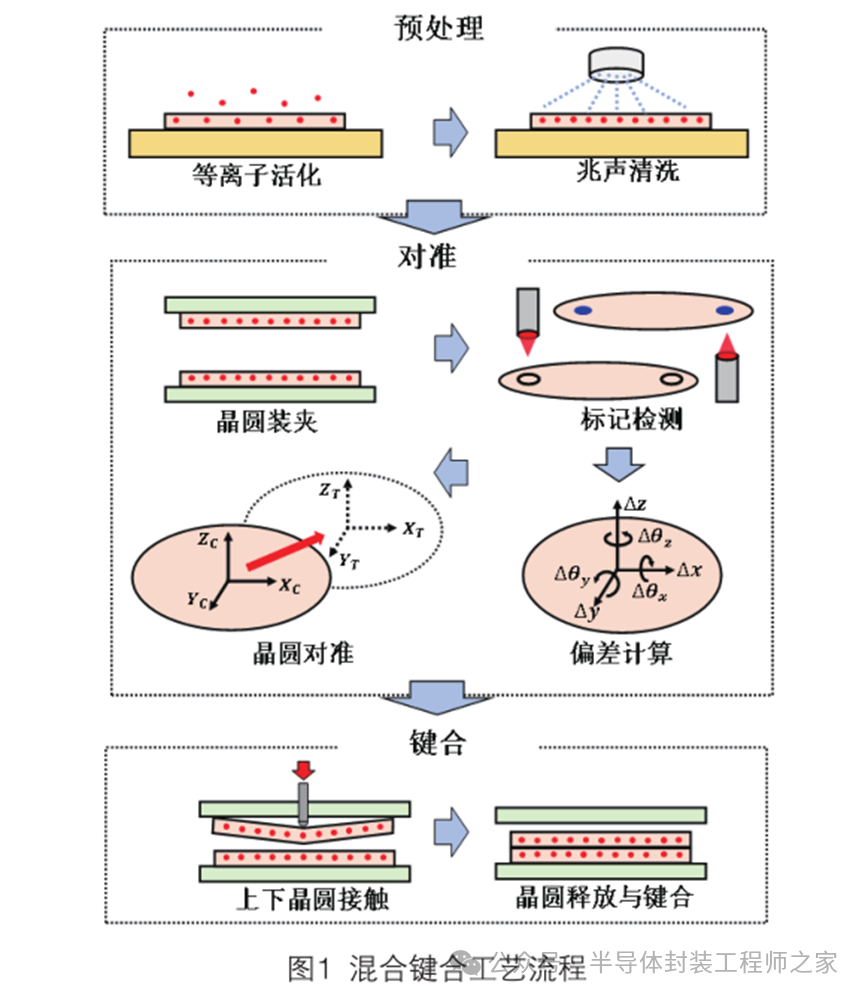
对准和预键合工艺在键合设备上完成。上下晶圆通过精密机械手放置在晶圆吸盘上,键合设备的视觉检测模块,分别检测上下晶圆的标识。对准算法计算上下晶圆标识的偏差,驱动宏动和微动对准模组实现上下晶圆标识的高精度对准。一般上下晶圆标识在水平方向的偏差为0.2 mm(直线偏差)和0.1°(角度偏差),偏差大小主要取决于机械手的精度。在视觉系统的引导下,对准模组会将综合偏差缩小至100 nm。
上下晶圆对准完成后,由安装于上晶圆卡盘上表面的键合轴穿过卡盘中心孔,下压晶圆中心位置使它变形,直至与下晶圆贴合。随后上晶圆卡盘断开真空吸附,使上晶圆沿径向扩散与下晶圆贴合,这一过程称之为形成键合波。键合轴上配备有高灵敏度接触力传感器和高精度位移传感器,用于实时精确判定和控制键合轴头与上晶圆接触力以及晶圆的变形量。
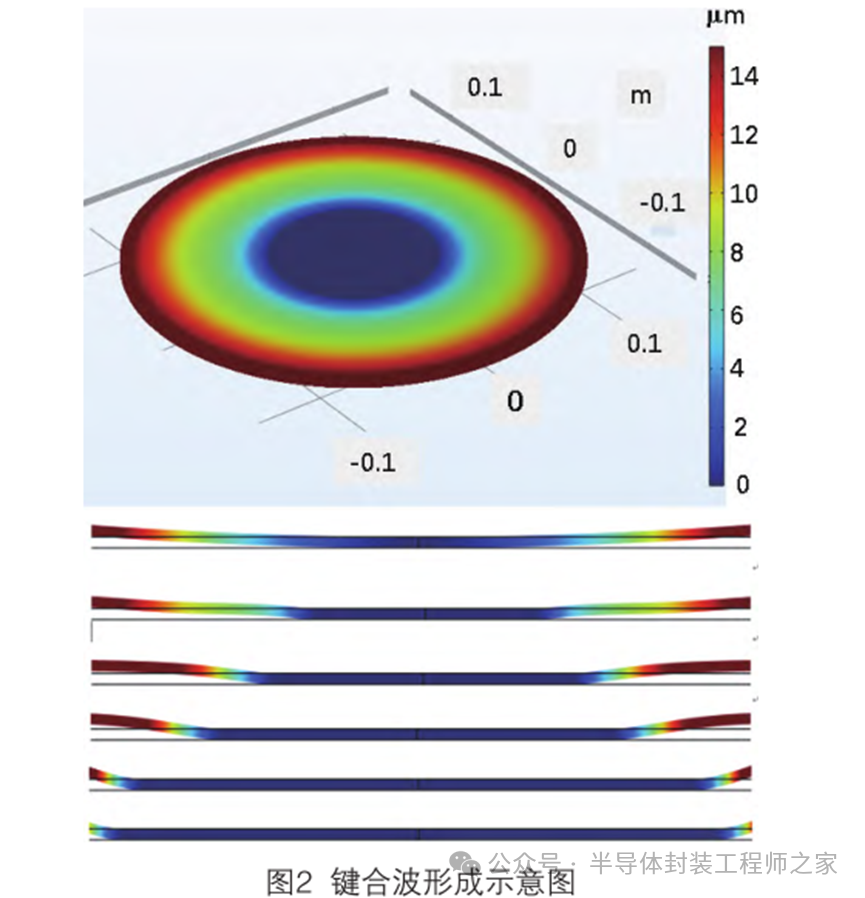
形成键合波的目的是让上下晶圆以点的形式接触,由内而外地沿径向扩散接触,以排出晶圆间的空气,避免产生气泡、间隙等不良[7-8],如图2所示。形成键合波是一个极为复杂的工艺过程,根据不同厚度、不同材质的晶圆,通过仿真计算和工艺摸索,需要事先确定好晶圆间的间隙、键合力、键合力持续时间、吸盘吸附力、吸附力降低速率等工艺参数(工业界称为“键合处方”)。预键合工艺参数较多,任意一个参数的不佳,极有可能造成预键合不良。键合波形成过程是键合误差的主要来源之一。
预键合完成后,通常使用红外透光对上下晶圆标识的重合度(预键合精度)进行检测,同时使用声学显微镜检测晶圆键合缺陷。之后,晶圆会被放置在高温高压环境中进行永久键合处理。如图3所示,在高温高压环境中,晶圆间的氢氧键会转化为水,以水蒸气形式挥发或者渗入晶圆内。

2 混合键合设备
主流高精度晶圆对准预键合设备有两种技术路线:一种是基于光刻技术的键合设备,另外一种是基于精度补偿技术的键合设备。基于光刻技术的键合设备的主要特点在于使用了光刻机的高性能运动平台和激光干涉仪搭配的反馈控制系统,本文中简称为高性能运动平台键合设备,代表品牌有索尼、TEL、尼康等;基于精度补偿技术的键合设备的主要特点在于使用了高精度视觉和传感技术引导补偿各类定位误差,本文中简称为视觉引导键合设备,视觉引导键合设备的代表有 EVG、苏斯等欧洲品牌。
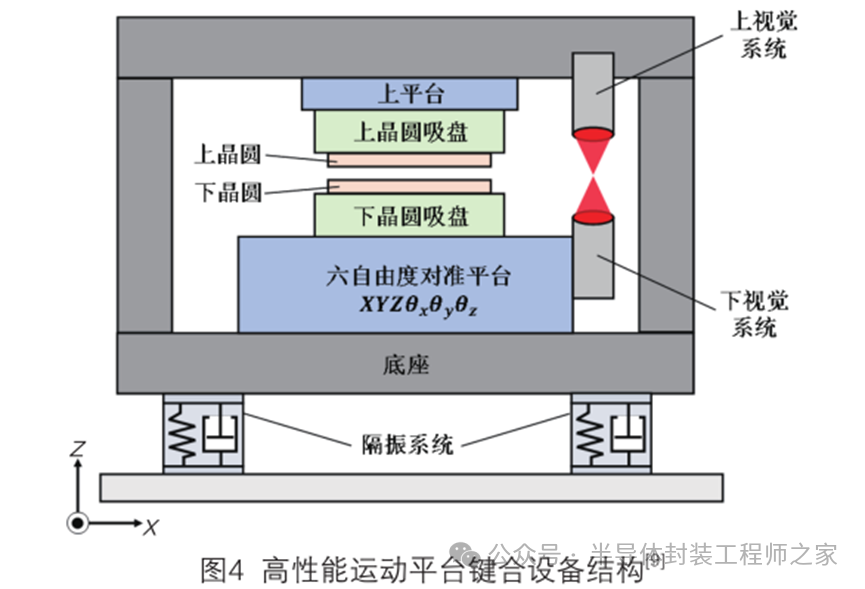
图4为高性能运动平台键合设备的结构简图。下晶圆及其卡盘安装在一个6自由度运动平台上,上晶圆及其卡盘反向安装在上运动平台下方,上下晶圆上表面面对面放置。上下运动平台采用激光干涉反馈控制和精密定位各运动轴。上视觉系统安装于上平台上,用于检测下晶圆的 标识;下视觉系统安装于下平台上,用于检测上晶圆标识。上下视觉系统采用同一高精度“十字”标识进行同轴度标定和补偿,将上下视觉系统建立在同一坐标系中。在对准预键合中,上运动平台始终保持静止,通过驱动下运动平台执行6自由度运动,实现上下晶圆标识检测和相对于上晶圆标识位置的下晶圆对准。
与高精度运动平台键合设备相同,在视觉引导键合设备中,上下晶圆及其卡盘分别安装于上下运动平台上,晶圆上表面面对面放置[10],如图5所示。晶圆上料完成后,下晶圆沿Y方向从上下料位置移动至预键合位置。下方的三个相互独立Z轴模组顶升下晶圆到预键合高度位置,同时消除上下晶圆的楔形误差(Z,θx,θy)。到位后,上视觉系统检测下晶圆的两个标识,记录到上视觉系统的坐标系中。Y轴将下晶圆从预键合位置移动至上下料位置,同时上晶圆被Y轴移送到预键合位置。下光学系统检测上晶圆的两个标识,并记录到下光学系统的坐标系中。由于上下视觉系统在XY平面的坐标差已标定,可以将上下晶圆标识合并到同一坐标系中。以下晶圆标识在视觉坐标中的位置为参考,计算出上晶圆标识的偏移量。基于对准算法,计算对准所需的3轴模组位移量,并驱动3轴模组实现上下晶圆对准(X,Y,θz)。最后,Y轴移送下晶圆返回预键合位置进行晶圆预键合,Y轴在XY平面的3自由重复定位误差由 X,Y,θz 3自由度模组进行补偿,达到高精度对准的目的。

以索尼、TEL等品牌为代表的混合键合设备具有结构简单紧凑、轴系精度高的特点,但对工作环境有较高要求。例如设备内部气流波动、温漂、湿度变化等容易引发激光波长发生变换,导致对准误差增大。以EVG、苏斯等品牌为代表混合键合设备具有兼容性强、对工作环境要求相对较低的特点,在后道制程的工作环境中有较好的适应性。
3 晶圆对准及对准偏差
主流键合设备采用两套上视觉系统分别检测下晶圆的两个十字标识,计算出标识中心点在上视觉系统中的坐标位置。再用另外两套下视觉系统检测上晶圆的两个圆点标识,计算出标识中心点在下视觉系统中的坐标位置。
晶圆键合标识常使用AIM(Advanced Imaging Metrology,先进成像计量),与光刻套刻的预对准用标识类似[11-12]。如图6所示,两个标识等距分布在12英寸晶圆上,其间距一般在200~280 mm。根据晶圆尺寸和表面富裕面积,整个图形最大尺寸确定为60 μm×60 μm,外边灰色部分和里边黑色部分分别位于上下晶圆上。
基于视觉系统检测的上下晶圆标识在视场中的坐标位置,可以构建如图7所示的坐标关系。其中,“十字”代表下晶圆标识,“圆点”代表上晶圆标识。上下视场的同轴度偏差经过事先采用高精度标识物进行了标定和补偿,补偿后的偏差不超过视觉系统的有效分辨率。上下视场同轴度补偿残差在标识偏差计算中不作考虑。


晶圆标识是由高精度光刻机制造,其尺寸精度和中心点间距误差一般小于10 nm,对于100 nm级对准精度而言忽略不计。即图中的∆x≈∆x1≈∆x2,∆y≈∆y1≈∆y2。上晶圆对准所需的移动量[12]可以表达为:

式中:(Tx, Ty)是在XY平面的直线平移量;Rw是旋转角度;(X, Y)是标识连线中心与回转中心的距离。
采用两个标识对准上下晶圆的方式被称之为整体对准(Overall Alignment),基本可以满足100 nm以上的对准精度要求。要是实现小于100 nm对准要求时,就需要考虑更多的因素,例如温漂、气流、扭曲矫正等导致的晶圆局部失真和变形。
4 亚百纳米对准键合要求及对策
4.1 高精度对准的标识测量方案
在光 刻 过 程 中 , 由 于 温 漂 、 气 流 和 晶 向 导 致的局部扭曲等因素,使同一片晶圆的不同区域存在晶片的缩放和扭曲等偏差,这类偏差统称为畸变偏差。主流的晶圆对准通过检测晶圆上的两个标识进行两片晶圆的整体对准。这种对准能够有效降低晶圆间的相对平移和回转偏差,但无法降低畸变偏差,导致存在畸变的曝光区域的对准残差过大。相关数据表明晶圆上的畸变偏差通常在30~60 nm之内,对于亚百纳米/深亚百纳米晶圆对准,畸变偏差已经成为了主要误差因素。
结合公式(1),包含畸变偏差的所有晶圆对准偏差可以表达为:
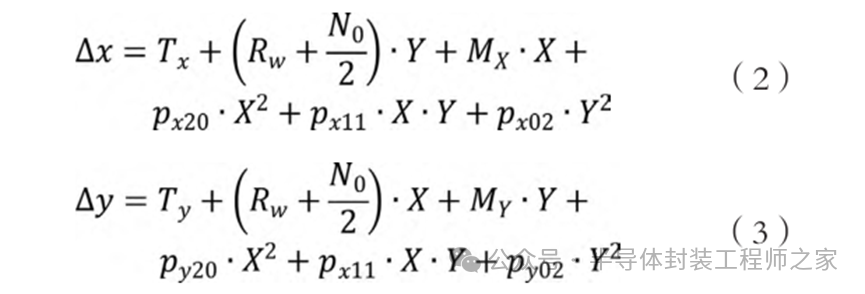
式中:N0是对角扭曲,也称正交性;MX和MY是晶片在X和Y方向的收缩或者放大量;px20、px11、px02、py20和py02称之为二阶修正参数。类似的,还可以引入更高阶的修正。这种对准修正称之为高阶修正(High order wafer alignment,HOWA)[12]。在套刻中,通过二阶修正就可以将对准偏差减低至8 nm以下,五阶修正则可以降低至5 nm左右。因此,高阶对准修正是进行亚百纳米/深亚百纳米的晶圆对准的必经之路。
在高阶修正中,存在多达十几至几十个修正参数。这就需要测量对应数量的对准标识,计算修正参数。这时可以采用光刻对准方式,利用晶圆曝光区域内的对准标识,进行多点测量[13],如图8所示。从而计算出整个晶圆所有曝光区域的最优对准偏差,提高晶圆所有曝光区域的对准精度,这种晶圆对准方式称之为全局对准(Global Alignment)。

4.2 高精度预键合的工艺处方
考虑上下晶圆的平整度,避免键合空洞,通常使用外力使上晶圆向下凸起,以点接触形式与下晶圆接触,形成键合波的起始点。凸起范围可在10~150 μm之间,凸起量至少应大于晶圆的平整度。
上晶圆凸起能够更好地形成键合波,然而键合前上晶圆的变形会对键合结果中的偏移和变形产生影响。相关资料表明,晶圆凸起50~100 μm,从晶圆中心大约100 mm半径处被卡紧时,晶圆的径向变形量可达500 nm。如图9所示,当上晶圆发生变形时,在弯曲区域的表面积Au大于下晶圆在对应位置的表面积Al。基于这一因素,利用键合设备的多点测量系统对变形量和形状进行实时测量与分析,如图10所示,控制下晶圆及其吸盘产生对应变形,以降低上晶圆凸起所引起的键合误差影响。

除了上晶圆偏移之外,键合力还会致使上晶圆中心点周围出现形变。当上晶圆中心点周围处于变形状态时,上下晶圆相互接触并固定在一起,而该形变会引发晶片与晶片的键合偏差。与此同时,键合力也会使上下晶圆移送运动台产生相对位移,进而产生键合偏差。这两类由键合力引起的偏差的解决方案将会在未来的研究中着重进行讨论。
5 总结
混合键合是晶圆间无中间介质在室温下进行的键合过程,对改善传统键合问题意义重大,是 3D IC的关键技术。本文介绍了其工艺流程,包括晶圆预处理、对准和预键合。预处理中兆声清洗有清洁表面和产生氢氧键的两个作用,对准和预键合在设备上完成。预键合完成后有检测环节,最后进行永久键合处理。主流高精度晶圆对准预键合设备有基于光刻设备技术和精度补偿技术两种技术路线,各有特点。晶圆对准采用具有4个物镜的两套视觉系统检测晶圆上的两个标识,计算偏差,通过设备上的对准模组实现晶圆对准。
在亚百纳米以及深亚百纳米级晶圆对准时,决定晶圆对准预键合偏差的主要因素有高精度对准的晶圆标识测量方案和高精度预键合的工艺处方。高精度对准可以采用高阶修正和全局对准,取得晶圆所有曝光区域的最优对准偏差。高精度预键合要控制晶圆变形以降低键合误差影响,未来还将研究键合力引起偏差的解决方案。
来源:半导体封装工程师之家
专心 专业 专注