从春晚舞台到马拉松比赛,“机器人”在今年爆火“出圈”,吸引了各界人士的关注。经历近几年的高速发展,人形机器人的火不仅没有灭,反而越烧越旺。据不完全盘点,当前国内人形机器人整机企业已突破140家,推出产品超过300款。
市场这么火热,MCU厂商也嗅探到了商机,在最近不断加强布局。今天EEWorld就来盘点当下MCU厂商的最新布局和分享。

人形机器人,催生MCU需求
MCU是机器人的“运动神经中枢”与“关节执行单元”。
人形机器人中有许多电机,机器人电机分两类:四肢关节模组功率为75W~1.5kW,腰膝部位的6~8个电机功率可达2.4kW或更高。每一个电机本身并不是一个孤立的执行元件,而是一个完整的控制单元,它内部集成了功率驱动MOSFET或GaN器件、MCU控制模块、位置与力矩传感单元,以及通信接口和保护机制。
以手臂为例,一只手臂通常由5到10个关节模组和一只灵巧手组成。关节模组一般采用无框力矩电机,每个电机都由一颗专门的MCU独立控制;而灵巧手则主要使用空心杯电机,控制方式上分为单轴和多轴两种方案:单轴方案中,一颗MCU控制一个电机;多轴方案中,一颗MCU可以控制三个或六个电机等。
研究显示,一台典型人形机器人大约需要56颗MCU电机控制芯片,分布在各部件中,用于精确控制关节、传感器和执行器。其中,手部的配置最为复杂,仅五指高自由度结构就用了30个电机;手腕和手肘各配有4个电机,肩部则分布了6个;下肢部分,包括髋、膝、踝关节在内,电机数量在10个以上;躯干、颈部等处也装有若干电机。

信源丨高工机器人
除了关节、灵巧手需要电机控制MCU,编码器也需要专用的MCU。

单台人形机器人编码器配置数量
此外,人形机器人中小脑、网关、BMS、IMU模块、激光雷达、编码器、无线通信/OTA升级这些模块也需要MCU,因此整体用量非常大。

图源丨由公开信息AI生成

对MCU提出哪些新要求
随着机器人从传统工业机器人向更多应用边界拓展,给整个机器人控制系统带来了更高的挑战,总结起来有四个“高”以及对应的需求。
-
高爆发:需要运行复杂的控制策略和算法,能够瞬时输出大功率;
-
高动态:控制系统需要快速调整,满足场景及任务的瞬变;
-
高精度:需要机器人执行任务的准确性;
-
高安全:由于存在与人的协助,或者机器人与关键设施的交互,功能安全和信息安全是一切基础,需要控制系统提供故障诊断机制和安全保护机制。
除此之外,MCU承担驱动电机、采集信号和实时通信三大任务。要提升运动控制系统表现,必须选用功能强大的MCU。
这与人类训练逻辑高度相似:加强肌肉力量,对应机器人就是提升关节瞬时功率;加强感官能力,就要加强控制精度与反应速度,人类反应时间为数百毫秒,而主流芯片已可实现毫秒级控制,能及时应对踩空、侧倾等突发状况,避免摔倒。
当前,运动控制系统的提升依赖两条关键环路:
-
环路一的关键在于提高运算速度与控制精度。MCU通过MOSFET或碳化硅器件驱动关节,编码器和电流采样模块将反馈信号传回MCU,形成控制闭环。MCU运算能力越强,响应速度和控制精度越高;
-
环路二的关键在于提高通信实时性与控制频率。一个机器人有20个左右的自由度和关节,每个关节都有其特定的负载要求。在完成一个动作时,各关节之间需要精准协调,如果协调不当,例如手关节快,而腿关节慢,就容易导致摔跤。当前主流内部通信总线为CAN FD和EtherCAT,其中EtherCAT传输极快,可实现微秒级响应,集成该功能的MCU将愈发重要。

因此,一款理想的人形机器人MCU的关键在于高算力、高性能运动控制、高实时通讯、高集成度及小型化、高安全和高可靠性。

当下厂商的布局
根据EEWorld观察,当下芯片厂商都在就人形机器人这一热点不断推出新品,无论是国外老牌厂商还是国内新势力都在布局这一赛道,很多汽车MCU赛道的厂商也在跨界机器人,不断加大布局。
TI:推出搭载NPU的AM13E230x
TI在今年3月推出了集成了TinyEngine NPU的AM13E230x系列实时电机控制MCU(包括 AM13E23019),该系列产品搭载了200MHz的M33内核,提供高达512KB的嵌入式闪存程序存储器(2个Bank,每个最大256KB),带有内置纠错码 (ECC),以及128KB带硬件奇偶校验的SRAM。
根据TI的说法,该系列MCU专为人形机器人应用而设计。在这些应用中,成本、紧凑性和精密电机控制是主要的设计挑战。通过使用集成了可编程增益放大器的器件,而不是使用分立式CAN和IGBT外设(通常与MCU配合使用),设计人员可以降低物料清单成本并减少外部元件数量。对于在系统层面不要求高精度的应用而言,这可以提供更紧凑、更具成本效益的解决方案。AM13E230x MCU具有7×7mm²的封装尺寸,因此可实现更大的运动范围,同时还能解决人形机器人关节电机中的空间限制问题。
除此之外,AM13E230x系列最关键的特性是集成了NPU,能够运行本地的边缘AI模型,主动监测扭矩、负载和电流等电机参数,从而检测到电机何时运行异常,并及早通知潜在问题,这些模型可以直接帮助实现具有宽运动范围和多自由度的类人关节和手指。


除了最新推出的AM13E230x系列,TI的C2000在人形机器人领域也有很高的适应度,比如TMS320F28P659SH-Q1,该芯片搭载C28和CLA内核,具有400MIPS处理能力,搭载16位ADC和高分辨率PWM,能够支持人形机器人逆运动学解算、轨迹规划的复杂运动控制算法实时计算需求,也能够支持关节力矩传感器、IMU对于高精度高精度传感器数据采集的需求,还能够支持伺服电机的精准驱动。

ST:完整的STM32布局
ST早就洞察到人形机器人对于MCU的核心诉求已经改变,尤其是电机控制领域。一是关节电机对MCU的性能、封装、耐高温、鲁棒性提出了更高要求,二是灵巧手空间有限,电机有限,对于MCU集成度和尺寸有更高要求。
STM32H7与STM32G4系列在电机控制领域非常经典,在人形机器人领域仍然适用,这些产品拥有广泛的客户基础和丰富的应用案例,并已构建起垂直化的电机控制开发生态。关节电机控制并非全新课题,工程师可以依托ST成熟的电机开发生态,实现应用技术的快速迁移。
STM32H7集成了550MHz的Cortex-M7内核,并配备高速缓存(CACHE)与紧耦合存储器(TCM),实现了对存储器的零等待访问。同时,高性能16位模数转换器(ADC)、高级定时器以及优化的内部总线架构等设计,大幅降低了环路控制延迟。
STSPIN32G4是一款高度集成且灵活的电机控制器,专用于驱动三相无刷电机,能够帮助设计人员实现最合适的驱动方式,同时减小PCB面积并降低整体物料成本。在人形机器人中,这种高集成度支持紧凑型设计和高效的执行器控制。该器件内置以下功能:一个三路半桥栅极驱动器,能够提供1A灌电流/拉电流能力以驱动功率MOSFET;三个自举二极管,用于简化设计。由于内置了互锁功能,同一半桥的高侧和低侧开关不会被同时驱动为高电平。此外,硬件VDS 监测电路会持续检测六个外部 MOSFET 的状态,一旦检测到过电压,将立即关断所有栅极驱动器输出。内部集成了一个高精度低压差线性稳压器,可从 REGIN 输入电压生成 3.3 V 电源(VREG3V3)。该输出为栅极驱动逻辑和微控制器供电,并具备短路、过载和欠压保护功能。

此外,ST还提供边缘AI MCU STM32N6,在机器人应用场景中,这一架构借助摄像头接口和片上加速能力,支持边缘侧的目标检测、姿态/手势估计以及场景理解等任务,从而满足导航和人机交互中常见的实时性要求。该系列集成了ST Neural ART加速器,这是一颗主频高达1GHz、可提供高达600 GOPS 算力的 NPU,支持先进的设备端人工智能。该器件基于Cortex-M55@800 MHz,并配备Helium(M 配置文件向量扩展)以加速 DSP 运算,面向在单个 MCU 上同时实现信号预处理/后处理与推理的边缘工作负载。
英飞凌:适用于尖端人形机器人电机控制
在人形机器人中实现运动控制是一项复杂的挑战。英飞凌为该领域提供了多种引人注目的 MCU 选择。由于人形机器人中有大量系统同时运行,特别是各种电机,因此有效的相互通信是必要的。这就是 EtherCAT 协议以其高速、低延迟、确定性通信能力发挥作用的地方。
英飞凌基于Cortex-M4F的XMC4300、XMC4800系列MCU除其他功能外,还包括集成的EtherCAT节点,这意味着无需专用的EtherCAT ASIC、外部存储器或石英钟发生器,从而节省了BOM成本和PCB空间,这两者都是人形机器人市场中关键的设计考虑因素。XMC7000系列也是英飞凌在人形机器人电机控制领域的主推产品之一。

另一方面,基于 Arm Cortex-M33的英飞凌PSoc Control C3专为电机控制设计的MCU 系列。凭借一流的模拟传感和PWM定时器,可以实现更高频率的PWM驱动器,这意味着 GaN 的实现已解锁。高采样频率还意味着更快的控制回路,从而改善 FOC 电机动态响应。
这两种解决方案都具有强大、专用的 IDE,以便于更轻松地实施。
在整个MCU布局方面,英飞凌拥有非常广泛的汽车MCU布局,可以将这些经验应用复用到人形机器人中。

Microchip:dsPIC33A系列备受关注
dsPIC33A系列是业界普遍用在机器人关节中的产品,该产品凭借硬件加速的FOC、MTPA以及CAN-FD、EtherCAT等实时接口,为整机厂提供从手指微小执行器到髋膝大扭矩关节的分布式运动控制平台。
比如dsPIC33AK512MPS506,解决“高集成度”痛点:它高度集成了高速ADC、模拟前端、比较器以及功能安全特性,减少了大量外围元件,为主控板腾出宝贵的空间。解决“发热”痛点:优化的架构和高效的指令执行,使得在完成复杂FOC算法的同时,功耗和自身发热控制在极低水平。性能优势:200MHz DSP性能,确保复杂运动学算法实时运行,实现丝滑流畅的关节控制。

先楫:EtherCAT+TSN双引擎的HPM6E00
先楫半导体作为RISC-V MCU代表厂商,一直非常关注人形机器人领域,其产品特色主要是EtherCAT+TSN双引擎,产品则是倾向于融合了高性能MCU与DSP的双重核心优势,其中高性能MCU以外设资源丰富为特色,DSP则以高实时控制能力成为行业标杆。
具体到产品方面,HPM6E00系列高性能MCU集成国内首款获得德国倍福公司(Beckhoff)正版授权的EtherCAT从站控制器(ESC),具备百兆bps通信带宽与极高实时性,完美适配机器人各关节电机控制单元间的多节点高速通讯需求。

该系列中,代表产品是HPM6E8Y系列芯片,主频600MHz,单芯片集成双核RISC-V、双以太网PHY收发器、高带宽千兆TSN交换机及32通道高分辨率PWM输出,实现了"小空间、大算力、强通信"的极致集成,为机器人关节伺服控制、灵巧手驱动等空间受限场景提供了理想的国产化解决方案。
CES 2026展会上,先楫半导体、HPMicro重磅发布全新一代高性能以太网总线运动控制微控制器——HPM5E3Y。这是继CES 2025推出HPM6E8Y后,先楫半导体在机器人芯片领域的又一创新突破。
HPM5E3Y与HPM6E8Y在架构、生态和应用层面高度兼容、优势互补,前者适配高集成、高效率、规模化部署场景,后者面向高性能复杂关节需求,二者共同构成目前全球最完整的机器人关节专用MCU产品系列。
相比HPM6E8Y,HPM5E3Y在主频、内存、外设等方面略有缩减,主打高性价比定位,精准覆盖对成本敏感但有基础性能要求的机器人控制场景。先楫半导体FAE 及解决方案总监余国民(Martin)向EEWorld表示:“芯片做加法容易,而精准的减法才是核心能力。精简并非简单删减,而是基于深度客户需求调研后的精准产品定义。”
ADI:明星产品Trinamic
ADI的Trinamic是电机控制的明星产品,TMC9660主要应用在人形机器人的关节运动控制上。运动控制是人形机器人的核心硬件,作为关键执行组件来驱动机器人执行机构进行运动。运动组件主要安装在机器人的关节处,也就是说连杆机构的连接处,通过将电机的旋转运动转化为驱动连杆机构的运动。驱动器或执行器由多种零部件组成,包括起传动装置作用的电机减速器、位置传感装置的编码器、控制板和控制软件等。
TMC9660集成了MCU、伺服三环控制(位置、速度、电流)、70V/2A智能栅极驱动器(GDRV)、运放、LDO及Buck转换器。包括智能栅极驱动单元(GDRV)、运动控制单元(MCC)、检测测量单元(MU)、电源单元(PMU)、保护诊断单元(PTU)五个功能单元模块。
该产品的最大亮点在于具有智能栅极驱动器IC,内置伺服(FOC)控制器和降压转换器以及快速模拟电流感应(ADC和CSA)。控制环路的最高频率达到100kHz,控制环路频率的提高能够降低电机的电流/扭矩纹波,增加电机控制带宽,实现更高的动态范围。可以无需软件编程即可轻松实现高级的FOC控制算法,最大程度方便客户使用。

NXP:基于i.MX RT1180的控制方案
恩智浦也特别关注人形机器人,无论是MCU还是跨界MCU,都能赋能人形机器人。具体来说,恩智浦曾经在GTC2026展示了和英伟达的最新合作,其中之一就是HSB就绪分布式电机控制参考设计,该设计基于跨界MCU i.MX RT1180,通过EtherCAT或时间敏感网络(TSN)实现确定性、同步的人形机器人运动。

兆易创新:解决人形机器人三大矛盾的GD32
兆易创新一直关注人形机器人领域,GD32系列MCU主要解决人形机器人三大矛盾:
-
一是高性能芯片通常伴随更大的功耗与发热,而散热效果又依赖于足够的散热面积,然而机器人关节空间极为有限,GD32 MCU在保持高性能的同时显著降低动态功耗,同时推出BGA176 10*10mm、WLCSP81 4*4mm等小封装选项,并采用高散热、高导热的封装材料,有效控制芯片结温;
-
二是为了减小板级面积,芯片需要集成预驱动、通信、感知接口等多种功能模块,但集成度越高,功耗与发热也越高,再加上机器人关节内部需要走线和空心结构,体积约束只会愈加严格,兆易创新在有限的芯片面积内集成更多功能;
-
三是当芯片结温过高,典型寿命会呈现量级跃迁式的衰减,将严重影响机器人的可靠性与寿命,兆易创新在低功耗设计的基础上进一步在功能安全层面构建了实时自检机制,截至目前,GD32H7、GD32G5、GD32F5等多个系列的配套STL软件测试库均已获得IEC 61508 SC3(SIL 2/SIL 3)等级认证,芯片能够持续监控自身运行状态,一旦检测到异常或失效征兆,可提前向“大脑”上报关节磨损或潜在风险,从而最大限度地避免机器人因芯片失效而失控伤人。

产品方面,兆易创新主推GD32H75E,它将EtherCAT®IP、PHY和编码器接口等多个高价值BOM器件集成于单芯片之中,可帮助客户减少50%~70%的板级系统成本、缩减40%~60%的PCB尺寸,同时降低40%~60%的系统总功耗。

GD32G553系列也是兆易创新在关节上的主推产品之一,采用Cortex-M33 @216MHz,比较适合控制一些大的关节。对于需要更加精密运动控制的精细关节,其对算法实时性要求更高,采用Cortex-M7内核、主频600MHz的GD32H7系列MCU会更加合适。有的客户一个机器人整体算下来会用到20多个M7内核的MCU,再加上10多个M33内核的MCU去做不同的关节任务,这些关节之间通过内置的总线进行通信,以保障每个关节之间的运动同步和数据同步。该系统的抖动可控制在纳秒级,同步周期约125微秒,甚至更短。
芯驰:从车规跨界到具身智能
今年北京车展,芯驰科技创始人兼董事长仇雨菁,公司战略升级至2.0阶段,从“行驶智能”迈向“通用智能”,强调技术同源、供应同脉、能力复用,并已实现规模化量产。
同期,发布了E3119-R机器人关节模组MCU。E3119-R作为机器人关节模组的主控芯片,具备高实时、高稳定的算力输出能力,采用双Cortex-R5F内核,主频高达400MHz,配置大容量SRAM和Flash。在实际研发场景中,可使用一个内核专用于电机控制算法,另外一个内核专注于通信处理,实现专核专用,性能翻倍。
为适配机器人的差异化场景需求,E3119-R采用9x9mm²的极致小封装设计,可释放机器人关节模组的结构空间,助力实现关节模组小型化设计目标。同时,E3119-R采用车规级的安全性和可靠性标准,具备完善的功能安全与信息安全机制,在主算力内核之外,还内置HSM单独内核R5,可实现SM2/3/4/9以及AES等国密算法,满足机器人认证从1.0往更高规格的安全等级认证需求。
E3119-R的全栈生态协同,可助力机器人厂商快速量产。开发套件生态成熟,支持IAR等多种编译器,软件支持AutoSAR、FreeRTOS等操作系统,做到发布即可用。

国民技术:N32H7+N32H4全栈MCU
根据国民技术介绍,荣耀“元气仔”能在马拉松赛道上走出稳定拟人步态,越疆Rover X1能在家庭场景中完成精细操作,均离不开国民技术N32H7+N32H4全栈MCU的关键支撑。
N32H7/4系列高性能MCU凭借高性能架构与丰富外设资源,为具身机器人构建高性能计算与控制核心:
-
强大算力:其H78系列采用多核异构架构(如Cortex-M7 + M4/GPU),主频高达600MHz/300MHz,提供1284/375 DMIPS处理能力,满足复杂算法与实时控制需求;
-
实时响应:通过“零等待取指”技术消除执行延迟,配合100ps级超高分辨率定时器,实现精准电机控制与任务调度;
-
高速互联:集成EtherCAT、CAN-FD等工业总线,支持全管脚映射,构建可靠通信网络并提升硬件设计灵活性;
-
专用加速:内置CORDIC协处理器,高效完成运动学涉及的三角/坐标变换等数学计算,释放CPU负载;
-
精密感知:搭载4.7Msps高速ADC与差分运算放大器,精准采集力觉、触觉等模拟传感器信号;
-
硬件加密:集成密码算法加速引擎,为固件提供硬件级安全保护。
综上,N32H7/4系列MCU通过性能、实时性、集成度与安全性的全面提升,为具身机器人构建了完整的底层硬件支撑平台。

极海:编码器专用G32R430和机器人关节APM32F425
极海针对编码器推出了专用MCU G32R430。极海指出,编码器在工业自动化和人形机器人等领域作用关键,尤其是在智能关节、灵巧手等核心部件中,对尺寸、精度和抗干扰能力的要求更高。这将推动编码器向更低延迟、更高集成度、更高能效和更高性价比发展。
编码器按处理方式分为协议转换型(集成)和模拟信号解码型(分立)。传统专用传感器模组/DSP成本高,难实现多圈计数,多数不支持编码器协议,需外配MCU,且不同场景需更换模块,维护不便;信号校准与角度补偿算法固化,难以通过算法优化提升精度。
极海称,G32R430是业界首款支持终端编码器自主算法的国产专用MCU。它内置自研ATAN电角度计算指令,显著缩短SIN/COS电角度运算时间,降低检测延迟,提升实时响应;集成16位高精度ADC,从信号源头保障位置检测精度,增强运动控制的可靠性与准确性。同时,内置主电电压检测模块EVS,减少外部电路,适配小型化设计。G32R430单芯片平台支持光电与磁电编码器应用,便于客户实现高效定制算法,为多场景提供灵活、高性价比的国产编码器方案。

极海也布局了机器人关节。极海指出,当前主流关节伺服多采用“MCU/DSP+FPGA+功率驱动”的多芯片异构架构,虽能实现功能拆分,但存在多个技术瓶颈:多芯片高速数据交互与时钟同步困难,控制延迟大,影响动态响应与抗扰动能力;软硬件耦合度高,设计、调试与验证流程复杂,增加开发与维护成本;分立器件多,PCB布局及电磁兼容设计难度大,制约小型化与一体化集成。
针对这一痛点,极海推出基于单芯片架构的机器人关节伺服参考方案,具备高动态响应、高控制精度、高功率密度与高可靠性四大优势,适用于工业机器人、协作机器人、人形机器人关节、AGV/AMR及高端数控设备等场景。
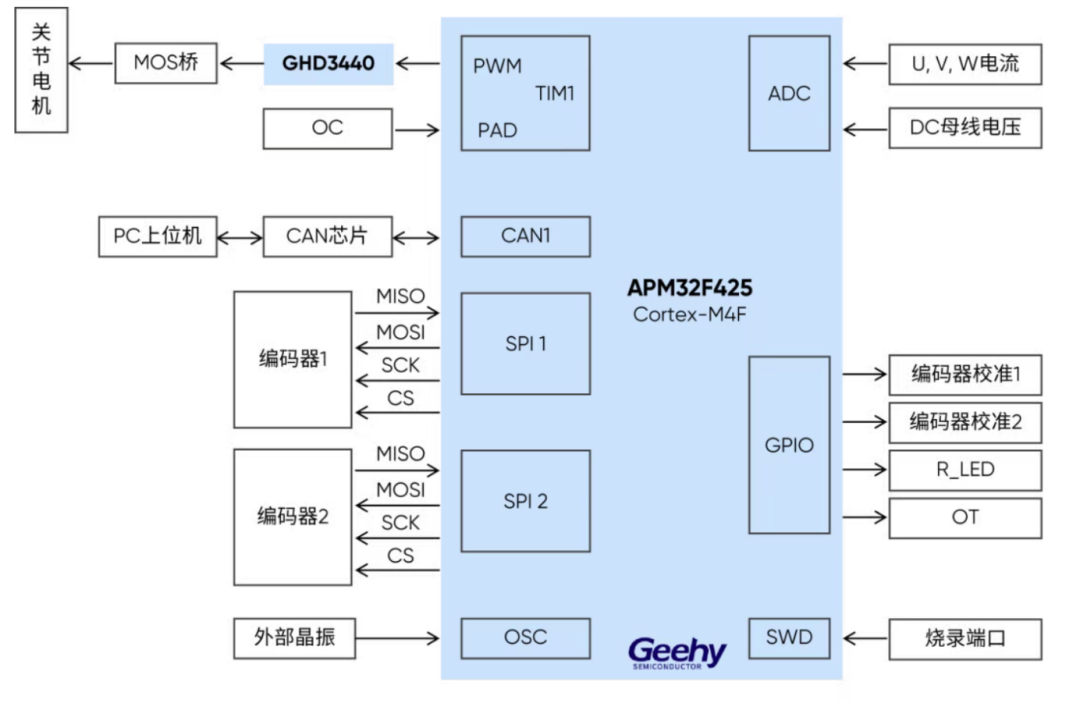
该方案采用极海APM32F425工业级MCU与GHD3440电机栅极驱动器,以单芯片全集成主控架构搭配专用功率驱动,构建从控制运算、信号处理、驱动放大到功率输出的完整闭环链路。方案深度整合主控、位置检测(支持双磁编码器)、FOC算法引擎、高精度磁编码解码单元、电流/电压采样、PWM生成、CAN通信、功率驱动及安全保护等模块,兼顾性能、集成度与性价比,完美适配关节伺服模组小型化、轻量化与高精度部署,满足规模化量产对低成本与稳定性的需求。

从汽车到人形机器人
很多人会把汽车和人形机器人联系到一起,事实上,汽车的确是“物理AI”的形态之一,虽然从汽车到机器人有一点跨界,但本质上具身智能和汽车有极高的相似度。
因此,也许我们可以从汽车MCU的发展,窥探人形机器人的发展路径。
当下汽车行业对MCU提出了哪些要求?
-
一是AI给为应用的组织形式和开发模式带来了巨变,这其中包括了算力和生态上的变;
-
二是功能的不断融合,从汽车角度来看,以前分布式架构需要100多个ECU,如今已经融合成五大域控架构,而未来将会成为中央计算与区域控制器相结合的方式,随着机器人行业的产能逐步提高,一定需要融合架构,这其中一方面是成本因素,另外一方面是ECU的融合可以提升控制效率,并且通过高集成度处理器实现更方便灵活的软件编程;
-
三是生态方面,机器人和汽车同样非常类似,也需要包括芯片、软件、操作系统、中间件、云端服务、应用在内的产业链发展。
根据兆易创新的分享,当前机器人速度仅为10公里/小时,但5~10年内将超越普通运动员甚至顶尖选手。性能提升同时伴随重大安全隐患,频繁故障可能导致严重后果,这与自动驾驶汽车的安全挑战高度相似。对此,机器人设计必须像智能驾驶汽车一样,全面考量功能安全,从整体电子电气架构到各零部件都提出明确安全要求,构建全链条保障,才能实现安全可靠的商业化应用。
除功能安全外,信息安全也容易被忽视。企业不希望商业机密被破解,这需要健全行业标准、完善法律法规,并依靠产业链上下游软硬件协同联动,消除安全隐患。










