点击蓝字 关注我们

欢迎各位专家学者在公众号平台报道最新研究工作,荐稿请联系小编Robert(微信ID:BrainX007);或将稿件发送至lgl010@vip.163.com。
英文标题:Bionic Hydrogel Sensor Patches for Embodied Human-Machine Interaction: Low-Constraint Wearable Design and Applications

成果简介
具身人机交互(EHMI)以人体运动信号为沟通媒介,旨在实现更自然、沉浸、直观且高效的交互体验。然而,由于沉重负载和机械束缚所带来的不适感,柔性水凝胶传感器作为 EHMI 核心感知设备的应用仍受到限制。为此,本研究受仿生蜘蛛远程传感机制的启发,开发了一种新型低束缚可穿戴水凝胶传感器贴片(LCWHSP)。通过创新性地将类芬顿(Fenton-like)反应引入光固化 3D 打印技术中,实现了石墨烯-Fe³⁺动态配位海藻酸钠-聚丙烯酰胺(GFSP)双交联水凝胶敏感材料的可打印性与性能参数的协同优化。LCWHSP 的十字形结构设计使其能够在皮肤表面进行单点多维感知,从而有效减轻了高密度传感器阵列所带来的异物佩戴感。通过利用信号采集系统和深度学习分析模型,研究实现了对手部动作的高精度识别(准确率达 98.60%)。其在控制虚拟界面和操纵机械臂等典型 EHMI 场景中的进一步应用,充分证实了该技术在实际应用中的巨大潜力。
研究亮点
材料制备工艺:将类芬顿反应引入光固化3D打印,利用引发剂PI-262在紫外光下释放的 Fe2+ 与过硫酸盐发生氧化还原反应生成 Fe3+和硫酸根自由基 。同时引发两种交联。
仿生设计:受“生物蜘蛛网”机制启发,提出了单点多维感知策略 。通过巧妙的十字形几何设计,仅需极少量的传感器件,即可远程捕获由肌肉和肌腱传导来的多维应变特征。
图文解析

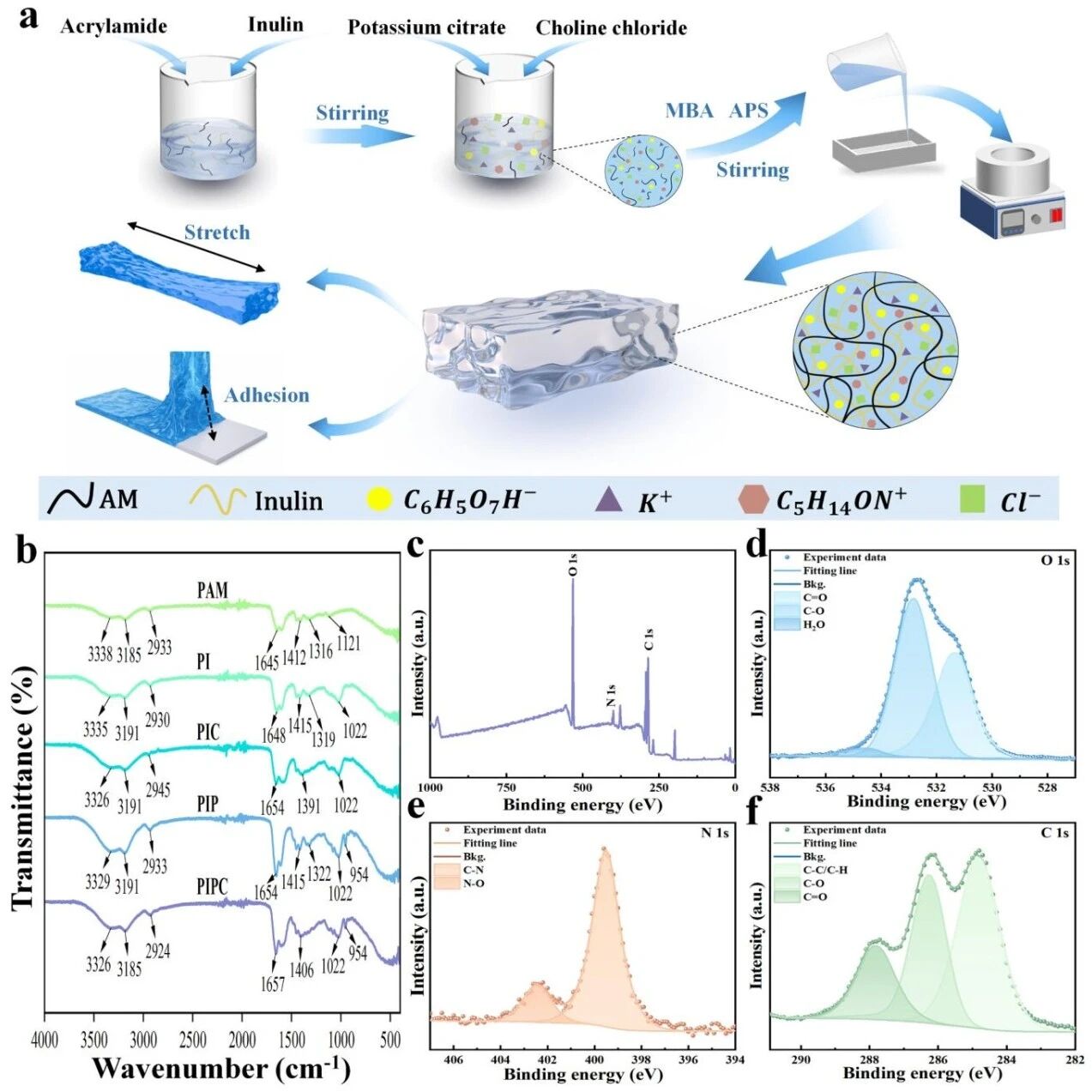
图1. (a) GFSP 的合成路线以及双网络内部相应的相互作用。(b) 光固化 3D 打印的 GFSP 水凝胶样品。(c) 含有各种吸光填料的光聚合 3D 打印 C-FSP 水凝胶样品。

图2. 不同浓度 (a) SA、(b) PI-262、(c) MBA和 (d) AM下水凝胶的应力-应变曲线。 (e) 不同 AM 浓度下的水凝胶在 500 次循环后的稳定性。 (f) 不同 GNP(石墨烯纳米片)浓度下水凝胶的应力-应变曲线和 (g) 电导率。 最优 GFSP 复合水凝胶的 (h) 生物相容性和 (i) 皮肤粘附状态。

图3. (a) GFSP 水凝胶的传感机制。(b) 水凝胶在不同应变下经历五个拉伸循环后的信号响应。(c) 响应与恢复时间。(d) 灵敏度。(e) 水凝胶在不同应变下的电流-电压曲线与 (f) 应力-应变曲线。(g) 水凝胶对阶跃应变的信号响应。

图4. (a) 传统的佩戴式传感器与手部新设计的传感器贴片。(b) 参数拟合曲线。传感器贴片在(c) z 轴方向 5% 应变、(d) x 轴方向 5% 和 10% 应变、(e) x 轴与 y 轴夹角 45° 方向 5% 和 10% 应变时的应变分布云图。(f) 传感器贴片的制备工艺流程图。

图5. (a) 柔性传感器贴片的信号采集与应用模块示意图。(b) 肘部屈曲、(c) 腕部屈曲、(d) 膝部屈曲、(e) 踝部屈曲 以及 (f) 各种手势运动的信号响应曲线。

图6. (a) 手势神经网络模型示意图。(b) 神经网络模型混淆矩阵。传感器贴片在(c) 动作捕捉、(d) 机械臂控制 以及 (e) 游戏控制中的应用。
研究结论
通过引入类芬顿反应,实现了光聚合 3D 打印水凝胶的可打印性与功能性能之间的协同优化,从而成功制备出兼具高机械合规性和优异综合性能的 GFSP 水凝胶。作为核心传感材料,GFSP 展现出 54.19 kPa 的抗拉强度、0.92 S/m 的电导率、0.01% 的检测极限以及 1.582 kPa-1 的灵敏度,其响应时间和恢复时间分别为 14.22 ms 和 21.56 ms。为了解决水凝胶压阻传感器在具身人机交互应用中长期存在的穿戴舒适性难题,本研究受蜘蛛捕食机制的启发,提出了一种创新解决方案,并成功开发出LCWHSP。十字形的结构设计赋予了 LCWHSP 单点、多维的感知能力。通过优化传感器布局,在保证信号质量的同时,显著减少了佩戴器件的数量和密度,从而有效减轻了皮肤刺激并提升了佩戴舒适度。在此基础上,通过整合自主研发的信号采集硬件和深学学习分析模型,构建了一套完整的 EHMI 系统。该系统能够实现高精度、实时的人手势识别,并能可靠地执行虚拟对象控制和机械臂操纵等复杂交互任务。本研究为开发自然、舒适且高效的下一代人机交互界面提供了一条可行的技术途径。
免责声明:原创仅代表原创编译,水平有限,仅供学术交流,如有侵权,请联系删除,文献解读如有疏漏之处,我们深表歉意。



公众号丨智能传感与脑机接口