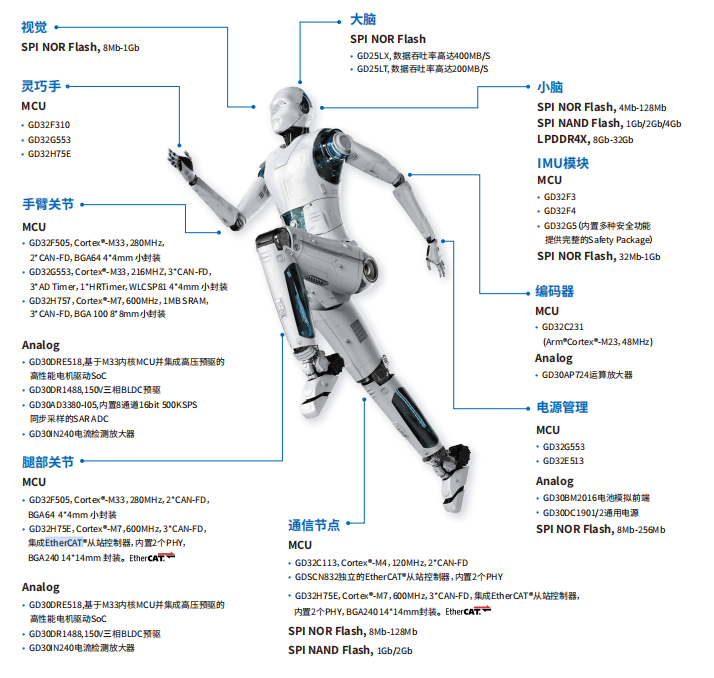
2026年,人形机器人加速从实验室走向复杂的工业与家庭场景,这也对核心硬件提出了前所未有的严苛要求。一方面,为了在毫秒级内完成奔跑、后空翻等高动态平衡控制,机器人急需具备微秒级同步、超低延时的通信系统来构建精准协同网络;另一方面,为了适应紧凑的关节空间与轻量化需求,芯片等核心元器件必须在极度受限的体积内,同时解决高集成度、耐高温散热与高可靠性等多重矛盾。面对这一系列技术挑战,兆易创新是如何凭借全场景产品布局与核心技术,深入形机器人市场呢,电子发烧友网与兆易创新MCU事业部产品市场经理李孝剑就相关问题进行了对话。成本直降50%EtherCAT技术重塑机器人“神经网络”兆易创新针对人形机器人的传感与电机控制两大核心板块,构建了完整的解决方案布局。李孝剑指出,兆易创新在人形机器人领域的差异化竞争优势,主要体现在以下四个方面:一是产品布局覆盖全场景需求。作为国内通用MCU排名第一的供应商,兆易创新拥有极其丰富的产品矩阵(现有600多个型号,其中适配机器人的超100个)。从入门级的M0/M23内核(适配灵巧手),到主流的M4内核(适配普通关节),再到超高性能的M7内核(适配对精度要求极高的谐波关节),实现了从低端到高端的无缝覆盖。二是掌握核心通信技术,打破行业壁垒。李孝剑表示,机器人关节之间的协同运动(如行走、抓取)高度依赖通信,这如同人体的神经网络。目前行业主流的通信技术为CAN FD和EtherCAT。其中CAN FD从汽车领域延伸而来,技术成熟、门槛较低,EtherCAT技术是当下在机器人领域备受关注的通信技术,能够影响机器人运动的精细度和同步性。但EtherCAT技术壁垒极高,源于工业自动化,国内仅有两三家芯片企业能够掌握,兆易创新正是其中之一。三是工业级可靠性与耐高温性能,以及功能安全。人形机器人在高强度作业(如马拉松奔跑)时,电机持续运转会导致内部温度高达100℃以上,这对芯片的稳定性和耐高温性能提出了严苛考验。兆易创新在工业市场拥有深厚的技术积累,能够从容应对机器人复杂、极端的运行环境。而功能安全则要求芯片具备严密的冗余架构与自检机制。在机器人电机控制等核心场景中,即便遭遇瞬间电流冲击导致芯片失效,系统也能通过应急机制或冗余芯片迅速补位,确保机器人能够平稳停止而不摔倒。兆易创新已通过IEC 61508 SC3(SIL 2/SIL 3)功能安全认证。目前在国内,拥有此类成熟认证产品的厂商屈指可数。四是本土化服务的战略机遇。在当前的国际竞争环境下,芯片的供应安全性至关重要。兆易创新与国内机器人公司保持着极其紧密的配合与响应速度,为客户提供最及时的定制化支持。上述提到的EtherCAT是基于以太网的高性能实时通信协议,具有微秒级同步周期、可达100Mbps的高带宽、低延迟特性。在人形机器人这个超过40个自由度的复杂系统中,EtherCAT将带来至关重要的作用。李孝剑指出,EtherCAT 能够实现整机微秒级的极致响应与超低延时。相比传统 CAN FD 通信 2~5 毫秒的控制周期,EtherCAT 技术可以轻松将控制延时压缩至1 毫秒以内。如果以人类 200~500 毫秒的反应速度作为参照,EtherCAT 将机器人的反应效率提升了两个数量级,实现了近乎“零延时”的精准控制。此外,EtherCAT 能够保障机器人在高动态下的平衡与稳定例如在机器人高速运动或突发异常(如行走时突然踩空、踩到坑)时,超低延时能让控制系统在毫秒间迅速调整关节姿态,避免机器人因反应迟钝而摔倒,确保复杂动作的连贯性与稳定性。又如在人群密集等复杂场景中,EtherCAT 能确保机器人在接收到超声波、激光雷达等传感器信号后瞬间做出急停或避让反应。当前,兆易创新正在加速研发集成 EtherCAT功能的MCU。例如明星产品GD32H75E集成EtherCAT IP,还将PHY、编码器接口等关键外设与 MCU融合,其在体积和功耗方面实现了明显迭代:板级系统成本直降 50%左右,PCB 尺寸与系统功耗双双缩减 40%~60%。兼顾体积、散热与成本兆易创新为人形机器人寻找“更优解”传统机器人(如大型工业机器人、协作机器人)与人形机器人存在本质区别。传统工业机器人通常功率大、无需与人交互、无需考虑体积,甚至需要用隔离网隔绝以确保安全。而人形机器人由于要融入人类环境,面临着以下四大核心差异与技术难点:一是关节必须做得非常小巧,进而对内部核心芯片的体积提出了极高的微型化要求。二是人形机器人的微型关节内部空间极度受限,难以加装风扇等主动散热装置,因此要求内部芯片必须具备极强的耐高温特性。三是需要保证芯片在人形机器人高动态运动下的抗震动与可靠性。四是动态环境下的主动安全与平衡控制。那么,为了适应人形机器人紧凑的关节空间,又该如何在小型化的同时,保证产品的关键性能?面对小型化带来的散热难题,兆易创新并未单纯依赖增加成本更换晶圆工艺,而是通过芯片设计端的迭代优化,成功在常规工艺平台上将芯片耐温能力提升至 125℃(传统公规芯片通常为105℃)。在封装技术上,兆易创新引入了导热性更强的封装材料。李孝剑也指出,芯片并非越小越好。过小的体积会导致引脚间距过密,迫使客户必须采用更高层数的PCB板(如从双层板升级为四层板)以及更高精度的SMT焊接工艺,从而导致终端生产成本成倍增加。因此,兆易创新在布局时充分兼顾了体积、散热与客户的生产成本,寻求最优平衡点。目前,兆易创新在机器人行业推出了多款广受欢迎的明星方案,例如GD32F505提供 BGA64 (4×4mm) 等微小封装,GD32G553则支持81引脚的 4×4mm极小封装。结语人形机器人的腿部和灵巧手面临着极为严苛的技术瓶颈。李孝剑指出,腿部的芯片面临小体积与高可靠性的平衡,以及通信速率与线束限制。在通信方面,传统的 CAN 通信速率已明显不足,行业正加速向 EtherCAT 技术演进。但 EtherCAT 目前存在线束多、线径粗的缺陷,是当前需要攻克的的一大难题。灵巧手则受限于内部空间。目前市面上许多芯片仍属于“分离式架构”(即一颗主控芯片需要外挂多个 MOS 管等器件),这种方案导致整体体积过大,无法完美适配灵巧手对微型化和高集成度的严苛需求。兆易创新正在持续加大对人形机器人领域的投入,已与 200 余家机器人厂商建立技术对接,其中超过100家已采用兆易创新的芯片方案。未来,随着新技术的迭代,以及新品发布,有望解决更多人形机器人领域的核心痛点,加速人形机器人从实验室走向规模化量产与商业化应用。