
正常情况下,前庭系统(内耳)、视觉系统(眼睛)和躯体感觉系统(皮肤、肌肉)会向大脑传递一致的运动信息。例如:
坐车时,眼睛看到窗外景物后退,内耳感知到车辆的直线 / 旋转运动,身体也感受到座椅的支撑力变化,三者信号统一,大脑能准确判断 “正在运动”,身体适应良好。
但晕车时,这种信号一致性被打破了:
比如坐在封闭车厢内看手机,视觉系统会告诉大脑 “身体静止”(因为手机或车内景物相对静止);
但内耳的前庭系统却能感知到车辆的颠簸、转弯、加速等运动,向大脑传递 “正在运动” 的信号; 两种矛盾的信号被送入大脑,大脑无法统一判断身体状态,就会触发 “异常警报”—— 这种冲突被解读为 “可能中毒”(进化中,感官混乱常与毒素致幻相关),进而引发恶心、呕吐、头晕等晕车症状。
儿童和女性更容易晕车,部分原因是他们的前庭系统更敏感,对信号冲突更难耐受;此外,睡眠不足、疲劳、气味刺激等也会加重这种不适。
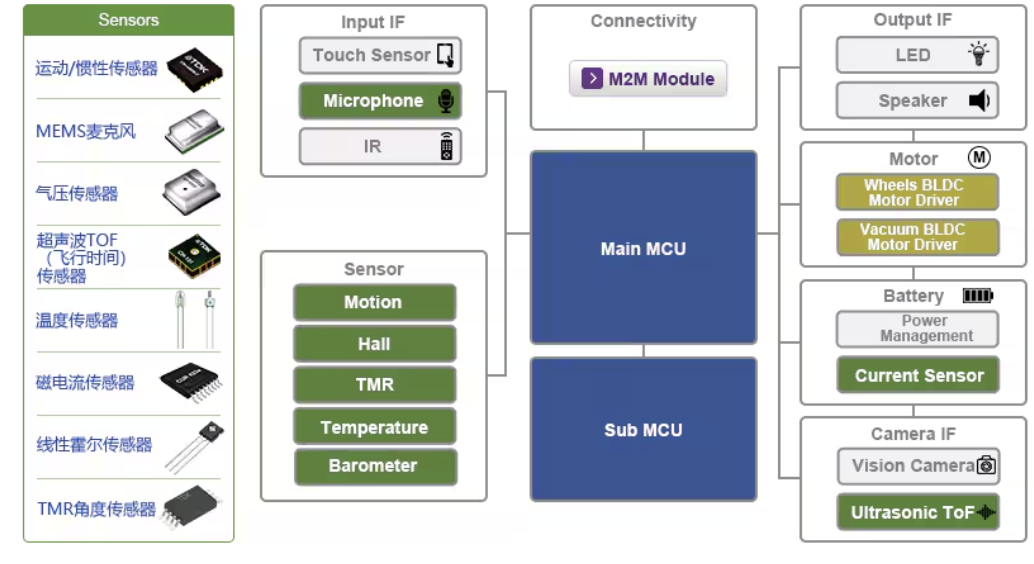
如果我们把摄像头、深度相机、雷达比作机器人、无人机的眼睛的话,那么IMU这个“器官”比喻成“内耳”再贴切不过了。
a)陀螺仪
陀螺仪是通过测量科氏力来检测角速度的,科氏力在大学物理中提到过,如图

若圆盘逆时针旋转,你在盘心向边缘沿半径匀速直线 扔出一个球。 - 静止观察者
看到:球沿直线飞出(蓝色路径)。 - 圆盘上的观察者
看到:球的轨迹向右弯曲(红色路径)→ 仿佛有“无形之力”拉动它。
→ 这个虚拟力就是科氏力!
科氏力公式:

( m ):物体质量 ( ω ):旋转坐标系的角速度矢量 ( v):物体在旋转系中的速度矢量 “×” 表示矢量叉乘 → 力方向垂直于运动平面!
在实际的MEME传感器中,大致结构如图,在一个方向保持左右运动,若有旋转的角速度则会在垂直的方向产生科氏力,通过电容的变化来反映这个力的大小便能得到旋转速度的大小。

a)加速度计
加速度计的原理较为简单,就是通过牛顿第二定律来测量三轴的加速度,图中的质量块受到加速度的作用会左右运动,而两侧的电容能测量质量块的位置从而计算出加速度的大小。

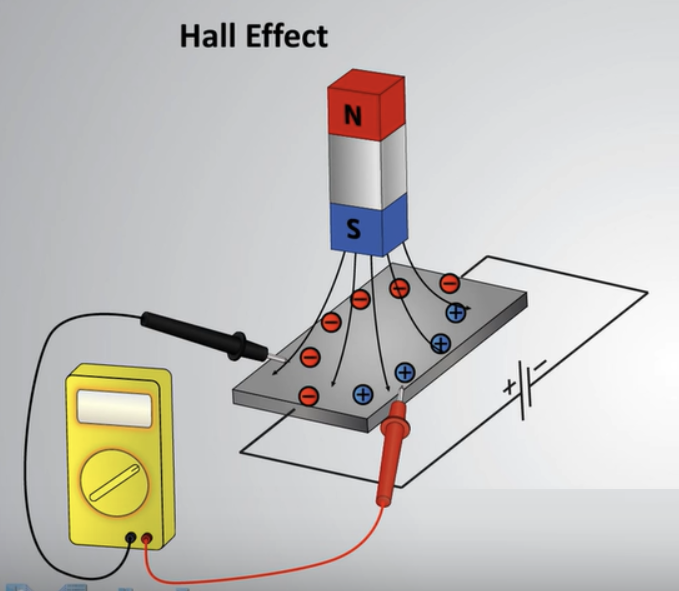
a)磁力计
磁力计则是通过霍尔效应来测量磁场的强度,高中物理中学过霍尔效应也很简单,如图。一端通电,在磁场的作用下电子会往垂直的方向上跑从而在侧面产生电场,通过测量这个电场的强度及正负则能间接测量出场强的大小。
一般来说,无人机和机器人上的磁力计,是用来测量地磁的。用于机器人找得到“北”。
IMU:机器人的 “内耳”
简单来说,IMU 的核心功能是测量物体的角速度(陀螺仪)和线加速度(加速度计),再通过算法(如卡尔曼滤波、欧拉角解算)推算出姿态(如俯仰角、横滚角、航向角)。无论是家庭扫地机器人避开障碍,还是工业机械臂保持轨迹精度,都离不开 IMU 的实时数据支持。
而一款 IMU 的 “好坏”,不能只看品牌,更要盯着参数表 —— 这些数字直接决定了它在噪声控制、测量范围、功耗等方面的表现。
关键参数解析:从性能到实用性
我们以 InvenSense(TDK)的 IMU 芯片为例,拆解 IMU 的核心参数及其对应用的影响。
一、基础硬件特性
1. FIFO(First In First Out)
- 定义
:芯片内部的先进先出数据缓冲区,用于临时存储传感器数据。 - 作用
:当主控处理器(如 MCU)处理数据速度较慢时,FIFO 可缓存多组传感器数据,避免数据丢失。例如,芯片以 1000Hz 采样,但 MCU 只能以 200Hz 读取数据,FIFO 可暂存 5 组数据。 - 典型值
:ICM-42688-P 的 FIFO 为 2KB,ICM-42670-P 为 2.25KB。
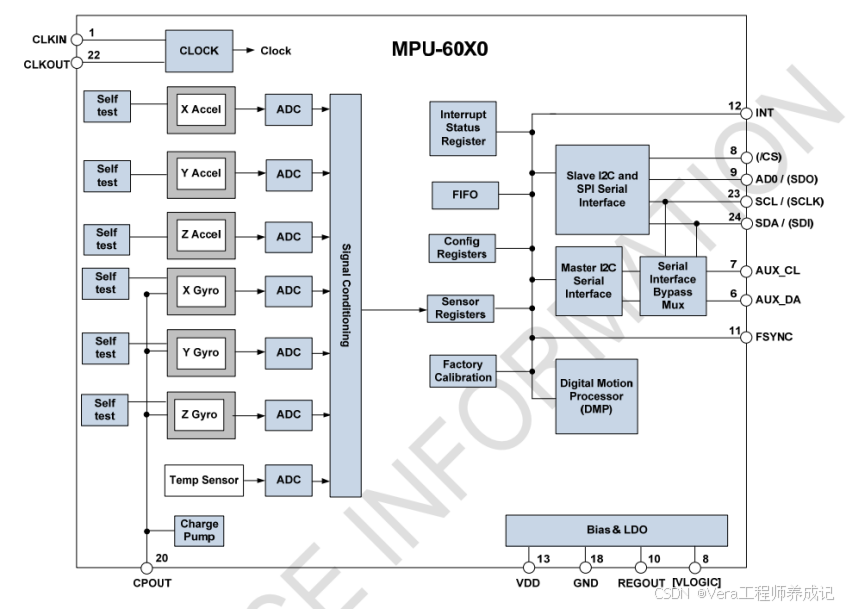
2. ADC(Analog-to-Digital Converter)
- 定义:模数转换器,将传感器的模拟信号转换为数字信号。在IMU芯片内部,还是需要用ADC对上述电容对应的电压值进行采样的。
- 关键指标:位数(如 16bit)决定分辨率,16bit 可表示 65536 个离散值,量化误差更小,精度更高。
3. 可编程数字滤波
- 定义:芯片内置数字滤波器(如低通、高通),用户可通过编程设置滤波参数。
- 作用:滤除特定频率的噪声。例如,设置低通滤波截止频率为 50Hz,可抑制高于 50Hz 的高频噪声(如电机干扰)。
4. 温度传感器
- 作用:实时测量芯片内部温度,用于温度补偿(如校准陀螺仪零偏随温度的漂移)。
- 精度要求:通常需 ±1°C 以内,以保证补偿效果。
5. 可编程中断
- 定义:芯片可根据预设条件(如加速度超过阈值、FIFO 满)主动向主控发送中断信号。
- 应用场景:低功耗场景中,仅在需要时唤醒主控,降低系统功耗。例如,运动唤醒检测(WoM)触发中断后,主控才开始处理数据。
6. IIC 接口 / SPI 接口
- 定义:两种数字通信协议,用于芯片与主控间的数据传输。
- IIC:双线制(SDA、SCL),适合短距离、低速通信(标准模式 100kbps,快速模式 400kbps)。
- SPI:四线制(MOSI、MISO、SCK、CS),速度更快(可达数十 Mbps),适合大数据量、高速传输。
二、功耗与可靠性特性
7. 低噪声模式 / 低功耗模式
- 低噪声模式
:通过增加采样次数或优化电路设计降低噪声,但功耗较高。例如,ICM-42688-P 六轴同时工作时典型电流 0.88mA。 - 低功耗模式
:降低采样率或关闭部分电路以降低功耗。例如,ICM-42670-P 六轴同时工作时典型电流 0.55mA,睡眠模式仅 3.5μA。
8. 20000g 抗冲击能力
- 定义
:芯片能承受 20000 倍重力加速度的冲击而不损坏。 - 意义
:适应恶劣环境(如工业振动、无人机碰撞),确保物理可靠性。
9. Self-test 自测试
- 功能
:芯片内置测试电路,可自检陀螺仪、加速度计是否正常工作。 - 应用
:设备启动时执行自测试,快速排查传感器故障(如零偏异常)。
10. WoM(Wake-on-Motion)运动唤醒检测
- 原理
:芯片持续监测加速度,当检测到运动(如振动、晃动)时,从低功耗模式唤醒主控。 - 典型应用
:智能手表在用户抬手时唤醒屏幕,降低待机功耗。
三、陀螺仪关键参数(角速度测量)
11. 可编程满量程范围(FSR)
- 定义
:陀螺仪能测量的最大角速度范围,通常用 °/s 表示。 - 可选范围
:例如 ICM-42688-P 支持 ±15.625~±2000°/s(8 档可调)。 - 选择原则
:高速运动场景(如无人机)选大范围(如 ±2000°/s),但灵敏度降低;静态或低速场景(如倾角测量)选小范围(如 ±15.625°/s),提高精度。
12. 灵敏度比例因子
- 定义
:单位角速度对应的数字输出值(LSB/°/s)。 - 计算公式
:例如 FSR 为 ±2000°/s 时,灵敏度为 16.4 LSB/°/s,则 1°/s 的角速度对应 16.4 个数字量。 - 意义
:灵敏度越高,量化误差越小,测量越精确。
13. 非线性度
- 定义
:实际输出与理想直线的最大偏差百分比。 - 典型值
:±0.1%(如 ICM-42688-P 在 ±2g 量程下)。 - 影响
:非线性度越高,在大量程下误差越大。
14. 交叉轴灵敏度
- 定义
:某轴输入角速度时,其他轴的错误输出比例。 - 典型值
:±1.25%(如 ICM-42688-P)。 - 影响
:交叉轴灵敏度越高,轴间干扰越大,姿态解算误差越大。
15. 零速率输出(ZRO)
- 定义
:静止时陀螺仪的实际输出与理论值(0°/s)的偏差。 - 参数
:包含初始公差(如 ±0.5°/s)和温漂(如 ±0.005°/s/°C)。 - 影响
:ZRO 越大,静态时的角速度测量误差越大,长时间积分会导致姿态角累积误差。
16. 速率噪声谱密度
- 定义
:单位频率下的噪声强度,单位 mdps/√Hz(毫度每秒每根号赫兹)。 - 典型值
:例如 ICM-42688-P 在 10Hz 时为 2.8 mdps/√Hz。 - 意义
:噪声谱密度越低,输出越平滑,适合高精度应用。
17. 总均方根噪声(RMS 噪声)
- 定义
:特定带宽内的噪声有效值,单位 °/s-rms。 - 典型值
:例如 ICM-42688-P 在 100Hz 带宽、800Hz 采样率下为 0.07~0.14°/s-rms。 - 影响
:噪声越大,角速度波动越明显,需通过滤波算法平滑。
18. 机械频率
- 定义
:陀螺仪内部机械结构的谐振频率。 - 典型值
:25~29kHz(如 ICM-42688-P)。 - 设计原则
:工作频率应远离机械频率,避免共振导致测量误差。
19. 陀螺仪启动时间
- 定义
:从通电到输出稳定数据的时间。 - 典型值
:例如 ICM-42688-P 为 40ms,ICM-42670-P 为 30ms。 - 影响
:启动时间越短,设备响应越快,适合需要快速启动的场景(如无人机)。
20. 输出数据速率(ODR)
- 定义
:传感器数据的更新频率,单位 Hz。 - 范围
:例如 ICM-42688-P 的陀螺仪 ODR 为 12.5~32000Hz。 - 选择原则
:高速运动场景(如四轴飞行器)需高 ODR(如 8000Hz)以捕捉快速变化;低功耗场景可选低 ODR(如 12.5Hz)。
四、加速度计关键参数(线加速度测量)
21. 可编程满量程范围(FSR)
- 定义
:加速度计能测量的最大加速度范围,通常用 g 表示(1g≈9.8m/s²)。 - 可选范围
:例如 ±2g/±4g/±8g/±16g(ICM-42688-P 支持 4 档可调)。 - 选择原则
:剧烈运动场景(如碰撞测试)选大范围(如 ±16g);静态倾角测量选小范围(如 ±2g)以提高精度。
22. 灵敏度比例因子
- 定义
:单位加速度对应的数字输出值(LSB/g)。 - 典型值
:例如 FSR 为 ±2g 时,灵敏度为 16384 LSB/g,则 1g 的加速度对应 16384 个数字量。
23. 非线性度 / 交叉轴灵敏度
- 含义
:与陀螺仪类似,分别表示输出曲线的非线性偏差和轴间干扰比例。 - 典型值
:非线性度 ±0.1%,交叉轴灵敏度 ±1%。
24. 零重力输出(ZGO)
- 定义
:静止时加速度计的实际输出与理论值(如水平放置时 x/y 轴应为 0g,z 轴应为 1g)的偏差。 - 参数
:包含初始公差(如 ±20mg,1mg=0.001g)和温漂(如 ±0.15mg/°C)。 - 影响
:ZGO 越大,静态倾角计算误差越大。
25. 功率谱密度 / 均方根噪声
- 定义
:与陀螺仪类似,分别表示单位频率噪声强度(如 10Hz 时 65μg/√Hz)和特定带宽内的噪声有效值(如 100Hz 带宽下 0.65mg-rms)。 - 影响
:噪声越低,静态加速度测量越稳定,适合高精度倾角测量。
26. 加速度计启动时间 / ODR
- 含义
:与陀螺仪类似,分别表示启动稳定时间(如 10ms)和数据更新频率(如 ICM-42688-P 的 ODR 为 1.5625~32000Hz)。
五、电气与环境参数
27. VDD/VDDIO
- 定义
:芯片主电源(VDD)和 I/O 接口电源(VDDIO)的电压范围。 - 典型值
:最小 1.71V,典型 1.8V,最大 3.6V。 - 意义
:支持宽电压范围,便于与不同供电系统兼容。
28. 低噪声模式功耗 / 全芯片睡眠模式
- 低噪声模式功耗
:例如 ICM-42688-P 六轴同时工作时为 0.88mA,ICM-42670-P 为 0.55mA。 - 睡眠模式功耗
:例如 ICM-42688-P 为 7.5μA,ICM-42670-P 为 3.5μA。 - 应用
:电池供电设备需优先选择低功耗型号。
29. 温度范围
- 定义
:芯片正常工作的温度范围。 - 典型值
:-40°C~+85°C。 - 意义
:适应工业、汽车等恶劣环境。
六、IMU选型指南
- 高精度应用
(如工业机器人):优先关注噪声谱密度(越低越好)、零偏温漂(越小越好)。 - 高速运动场景
(如无人机):选择高 ODR(如 32000Hz)、大量程 FSR(如 ±2000°/s)。 - 低功耗场景
(如穿戴设备):选择睡眠电流小(如 3.5μA)、低功耗模式电流低(如 0.55mA)的型号。 - 恶劣环境应用
(如车载设备):确保温度范围覆盖 - 40°C~+85°C,抗冲击能力≥20000g。
理解这些参数,就能根据具体需求挑选最合适的 IMU 芯片,让机器人的 “内耳” 更灵敏、更可靠。
文章来源于硬十,作者
ADC 射频 Wifi 等芯片测试线下技术研讨会
(8月5日 苏州)