来源 | 瑞萨嵌入式小百科

如果你接触过机器人开发,大概率听过ROS 2。它常常出现在移动机器人、机械臂、自动驾驶小车、智能设备这些场景里。
但很多人第一次听到ROS 2时,也会有点困惑:它到底是一个系统?一个框架?还是一个机器人专用工具箱?
再往下看,还会遇到另一个问题:ROS 2通常跑在Linux主机上,那MCU这种资源有限的小芯片,能不能也接入ROS 2?这就要说到:

micro-ROS以及瑞萨RA MCU了


ROS 2的全称是Robot Operating System 2,中文通常叫机器人操作系统2。不过它并不是传统意义上的操作系统,更准确地说,它是一套面向机器人和智能设备开发的开源软件框架。

点击可查看大图
在一个机器人系统里,往往有很多模块同时工作。摄像头负责图像,雷达负责环境感知,IMU负责姿态,导航算法负责路径规划,底盘负责运动控制。如果每个模块都用自己的通信方式,开发者很快就会陷入一堆协议、数据格式和调试问题里。
ROS 2的作用,就是让这些模块用统一的方式协作。它把系统拆成一个个节点,每个节点负责一部分功能。节点之间通过标准消息通信,谁负责发布数据,谁负责接收数据,都可以清楚地组织起来。
你可以把ROS 2理解成机器人系统里的“协作语言”。有了它,不同硬件、不同算法、不同程序之间就更容易对话。
这也是ROS 2受欢迎的原因。它不只是让程序能通信,更重要的是让复杂系统变得更容易开发、调试和扩展。对于机器人、自动化设备、移动平台和科研教学来说,ROS 2已经是非常重要的基础生态。

ROS 2很强大,但它通常运行在Linux主机、工控机或边缘计算设备上。这些平台有比较充足的算力、内存和系统环境。
而MCU不一样。MCU更小、更轻、更贴近硬件,常常负责电机控制、传感器采集、按键检测、LED/OLED显示、安全保护和低功耗管理等任务。这些事情看起来不如导航算法“高级”,但在真实机器人系统里非常关键。
过去,MCU和上位机通信通常要自己定义协议。比如通过串口、CAN、SPI传输数据,然后两边都要写打包、解析、校验和状态同步。项目简单时还好,一旦功能变多,协议就会越来越难维护。
micro-ROS正是为了解决这个问题而出现的。它可以理解为面向MCU的ROS 2扩展方案,让资源受限的微控制器也能以轻量方式接入ROS 2。
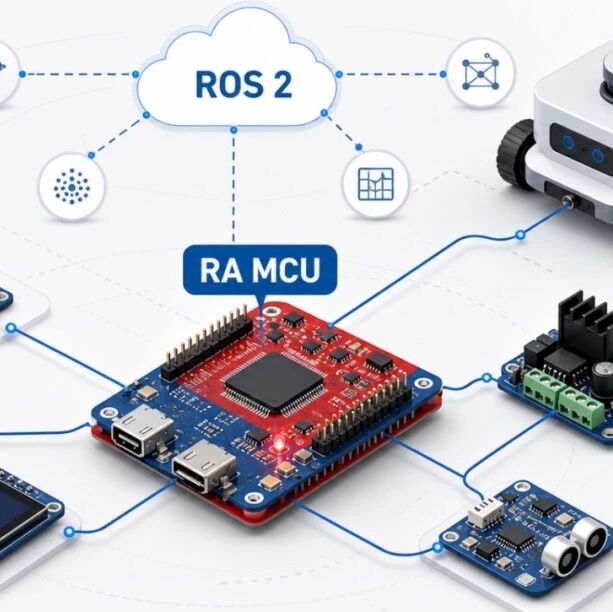
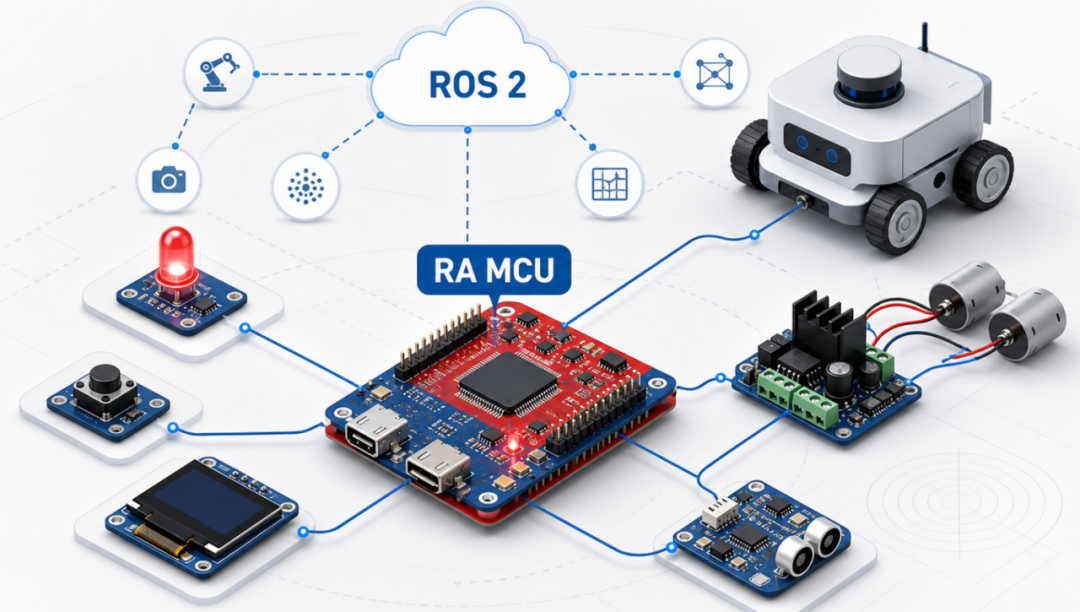
它的典型工作方式是:MCU端运行micro-ROS程序,上位机运行micro-ROS Agent。两者之间可以通过UART、USB、UDP、CAN FD等方式通信。Agent再把MCU的数据接入ROS 2网络。

点击可查看大图
这样一来,MCU就不再只是一个“串口外设”,而可以成为ROS 2系统里的一个节点。它可以发布传感器数据、按键状态、电机状态,也可以接收ROS 2下发的控制指令。

当MCU能接入ROS 2后,下一个问题就是:

什么样的MCU适合做这件事?

瑞萨RA系列就是一个非常棒的平台。RA系列是瑞萨基于Arm Cortex-M内核打造的32位MCU产品家族,覆盖从低功耗到高性能的多种应用场景。它具备丰富外设、低功耗能力、安全特性和较完整的软件开发生态,适合工业控制、IoT、智能设备和机器人边缘控制等场景。
点击可查看大图
对于micro-ROS来说,硬件资源当然重要,但开发生态同样重要。瑞萨提供e² studio和FSP,开发者可以用图形化方式配置外设、生成工程代码,再结合Arm工具链完成开发。这对于MCU接入micro-ROS很有帮助,因为移植工作并不只是写应用逻辑,还涉及串口、USB、CAN FD、时钟、内存和运行环境等底层配置。
更重要的是,瑞萨RA也并不是从零开始探索micro-ROS。瑞萨EK-RA6M5是micro-ROS官方支持开发板之一,瑞萨e² studio组件中也列出了RA6M5、RA6T2、RA8T2等平台和示例。

点击可查看大图
这说明micro-ROS与瑞萨RA系列已经具备较好的适配基础。这意味着很多经验可以迁移到更多RA产品上。
从这个角度看,RA6M5的官方支持不是终点,而是RA系列扩展micro-ROS生态的起点。

点击可查看大图

如果只看单个MCU,它可能只是负责采集一个传感器、控制一个LED、读取一个按键。但当它接入ROS 2后,意义就不一样了。它可以成为机器人系统中的边缘节点。上位机负责算法和决策,ROS 2负责系统通信和协作,micro-ROS负责连接MCU,而RA MCU就负责实时控制和边缘采集。
这种分工非常自然。复杂计算交给上位机,实时控制交给MCU,中间通过ROS 2统一组织。对于机器人、智能设备、工业控制和边缘IoT应用来说,这是一条很实用的技术路线。
未来,MCU不一定只是“被上位机控制的小板子”。通过micro-ROS,它也可以成为整个ROS 2系统中被发现、被订阅、被调试、被协同管理的节点。
这就是瑞萨RA+micro-ROS值得关注的地方。它把传统嵌入式开发和机器人软件生态连接了起来,也给MCU应用打开了更多想象空间。
------------ END ------------