加入高工人形机器人行业群,加微信:13692257554,出示名片,仅限人形机器人及具身智能产业链相关企业
2025年的世界人工智能大会(WAIC),成了人形机器人的大聚会。
参展企业数量翻倍增长,机器人们争相表演:走路、握手、拳击、跳舞,应有尽有。但现场观察它们完成任务的效率,现实依然冰冷——没有一个能干活。
自2023年人形热潮爆发以来,供应链飞速迭代:关节模组加速量产,资本押注灵巧手,触觉传感器百花齐放……行业上下都在为真正的“落地”积极铺路。但眼下,机器人仍主要活跃在展示、迎宾、科研等环节,距离真正替代实际工位,还有不小的距离。
就在众多企业持续攻克“本体性能”难题时,有一家企业选择了另一条落地路径。
德马科技,这家长期深耕智能物流的上市企业,没有亲自下场造本体,而是转向“教机器人在垂直场景中学会干活”,从应用端切入具身智能机器人的下半场。

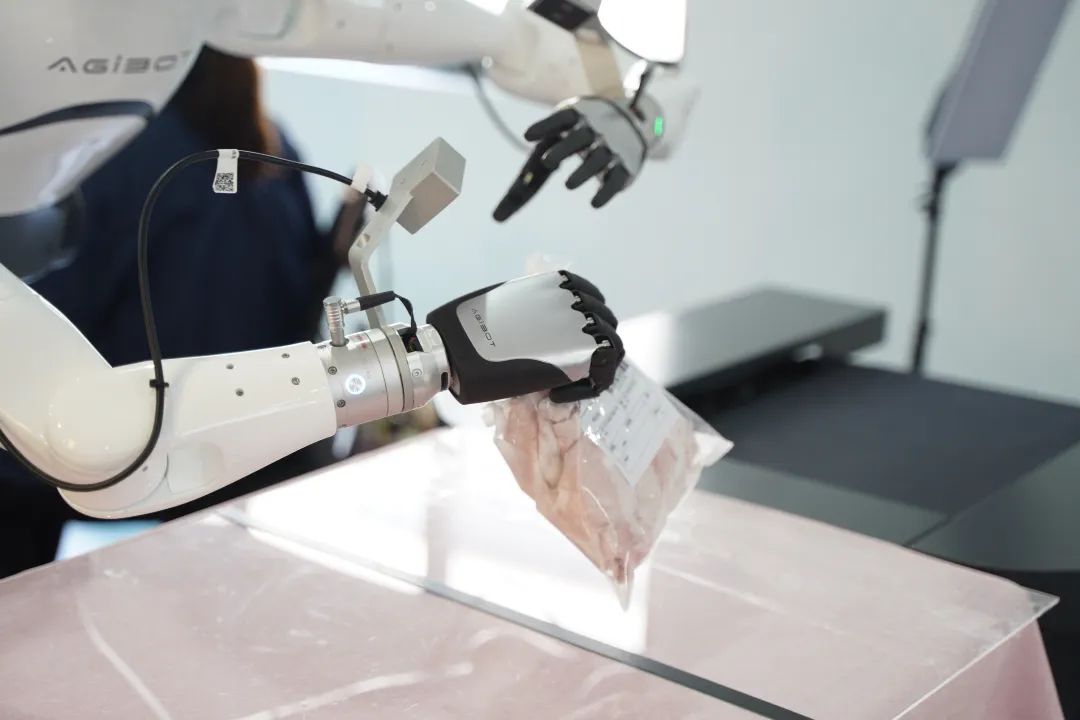
在今年WAIC现场,他们与行业顶流智元机器人联合发布了全球首个由数据驱动的具身智能机器人物流作业场景:在展会现场1:1复刻的物流作业区域中,德马的飞梭分拣机器人 Flash Sorter 与智元人形精灵 G1 协同作业,精准完成了全自动供包与包裹二次分拣任务。
德马方面表示,这一方案可广泛适配鞋服、零售、美妆、冷链、3C 电子、百货等多个行业,为柔性化物流作业提供全新解法。
他们不在比谁更像人,而是在以另一种方式回应行业目前共同追问的难题:
具身智能,究竟怎样才能真正“干起活”来?

从“像人”到“干活”——德马的下半场打法
在德马看来,人形机器人的“上半场”已经结束。
过去两年,本体企业高举高打:发布会上秀“肌肉”、展台上拼“动作”,从双足步态控制、关节模组设计到灵巧手结构优化,行业一路卷出了令人惊叹的“可演示性”。
这一阶段,几乎所有资源都集中在“机器人长成什么样”“能不能站起来”“动得漂不漂亮”这些问题上。
这是以本体性能为核心的时代。结构设计、执行器方案、末端模组、运动控制系统,成为整条产业链的技术热点;而在“小脑”层面,各类控制器与硬件协同也趋于成熟。随着核心模块逐步标准化、模块化,这场以参数为导向的竞赛正走向收尾。
但新的问题浮出水面:为什么机器人依然无法真正“上岗”?
德马的回答是:“因为大脑还没发育。”
“现在很多人形机器人,说白了就是以前的迎宾机器人换了个人形外壳。”德马集团战略发展负责人黄盛直言,“没有大脑、没有数据、没有演进机制,它就干不了活。”
在德马看来,行业已进入真正的“下半场”:这是一个以“实地数据 + 智能大脑 + 落地任务”为核心的新阶段。

焦点不再是“如何造出更强的机器人”,而是“如何让机器人真正开始干活”。机器人需要在真实场景中反复执行任务,从工作中生成数据、形成经验,进而优化模型、适应变化,在岗位上创造实际价值。
与此同时,它们还将持续产出多模态数据,反哺具身大模型,构成一个正向滚动的“数据飞轮”。
德马切入这场竞赛的起点,是他们最熟悉的应用场景——智能物流。
即便是在高度自动化的大型电商仓库,依然有 400~600 名工人常年驻守一线,承担拆零拣选、商品打包、异常处理等任务。这些岗位普遍具有任务对象复杂、步骤变化多、柔性要求高等特征,长期被视为“程序控制型”机器人的能力盲区。
而这,正是具身智能机器人的潜力所在。

德马选择与智元机器人等头部本体企业合作,从最轻量的作业环节切入:先教机器人识别单一 SKU、完成基础搬运与转移动作,再逐步扩展至多 SKU 分类、多任务组合与多场景适配。下一阶段,他们将引入更多类型的机器人本体,提升承重能力与系统续航,最终将人形机器人纳入整厂智能物流体系,实现真正的“多机协同”。
“我们的目标,是让人形机器人与 AMR、无人叉车等设备共同构建全厂无人化物流体系。”黄盛表示,“但前提是,人形机器人的能力曲线必须快速拉升。”
而支撑这条曲线持续攀升的底层燃料,正是数据。
与传统机器人依赖程序来预设规则和精确环境建模不同,具身智能机器人是基于端到端VLA模型技术,通过海量真实数据训练出的“大脑”,从而能像人类一样实时感知真实的物理环境(“眼”)、理解工作任务(“脑”)、并精准执行操作(“手”)。
这也是德马与智元机器人共建具身智能训练与数据采集工厂的核心逻辑。通过标准化流程、1:1 还原的真实作业环境、批量化机器人部署,他们得以系统采集高质量、多模态的作业数据,以此训练具身大模型,借助原子动作的学习与组合,真正实现“机器人从任务中学会任务”。

但要想走通这条路径,单靠本体企业远远不够。
本体厂商或许擅长研发人形机器人本体能力,却很难独立完成机器人“落地到工位”的全过程。而真正理解业务流程、掌握动作逻辑、熟悉作业节奏的,恰恰是像德马这样深耕垂直行业、具备系统集成能力的玩家。
“机器人要干什么活?怎么干?怎么训练?这些必须由我们这些做场景的企业来教。”黄盛强调。
但真正“教会”机器人干活,并非易事。
在德马看来,当前行业面临三大挑战:
第一,数据稀缺。相较于大语言模型和自动驾驶,具身智能领域在真实场景下的系统化数据几乎是“荒原”。尤其是涉及传感器数据、环境交互数据等的多模态原始数据,包含姿态、力和力矩、视觉和视觉深度、触觉等多模态的真实数据,在全球范围内依然极度匮乏,“基本可以看作是零”。
第二,数据异构。不同厂商、不同机器人本体之间,数据模态、接口结构、标注体系各异,模型难以迁移,泛化能力受限,严重阻碍了行业协同和生态建设。
第三,训练代价高昂。目前单一动作需要几十台机器人共同训练,周期可长达几个月,参与数采的机器人本体加上相关数采设备和软件,单台价格高达 50 万元以上,再加上人工采集、数据清洗与标注的人力成本,整体数据训练支出极其高昂。
此外,据德马估算,10 台数采机器人每年就可产生超过 1PB 的数据,随着数据量暴涨,云端存储与传输成本也将快速抬升。
这些现实问题,已成为制约具身智能机器人规模化落地的关键瓶颈。
尽管挑战重重,黄盛仍保持乐观:“这是从‘干活’倒推‘建模’的路径,不性感,但走得通,而且也必须走。”
德马所押注的,是一条“务实主义”的路线。他们不追求“更像人”,而是致力于让机器人真正“能干活”。机器人唯有在真实场景中完成任务、采集数据、塑造能力,从简单任务到复杂工作,最终完成从“实验室产品”到“产业价值”的闭环。
这,或许才是真正能推动人形机器人走向落地的一条可行之路。

从应用出发,走向具身智能的“链主”角色
相比行业中普遍“从造本体开始”的路径,德马科技选择了一条从应用出发、再反哺产业链的逆向路线。
他们始终坚持一个判断:人形机器人的未来,必须扎根于真实场景。哪怕初期只能实现人类三分之一的效率,只要能够部署、形成训练闭环,具身机器人就具备了“自我造血”的可能性。
为此,德马的落地路径异常清晰:
首先,是在物流分拣等轻量任务中持续推进“泛场景化”演进。他们计划以季度为单位,稳定推出适配不同工位的新任务,下一阶段仍将聚焦于物流领域,并预计在今年Q4或明年Q1迎来首个真实客户项目的现场部署。德马希望,这将成为具身智能机器人在物流场景中实现商业化落地的第一次标志性尝试。

其次,是加速全球化推进。在德马看来,海外客户对“能干活”的人形机器人关注度正快速提升,尤其在人力成本高企、自动化接受度高的地区,市场需求已然迫切。他们计划以海外市场为下一个战略突破口,推动具身智能在全球范围内实现实质性落地。
“由于人力成本高昂,以及对机器人认知更成熟,海外市场的需求非常迫切。目前已有客户与我们接洽,表达出强烈的购买意愿。”黄盛坦言。
再次,是系统性解决“数据异构”这一长期困扰行业的问题。德马已设立两个专门研发部门:场景研发部负责动作分解与工厂数采支持,数据异构研发部则专注于跨本体间的数据标准化与适配机制,力图打通机器人之间的数据壁垒与协同能力。
在此基础上,德马正向上下游延伸布局:上游方面,他们正投资核心零部件企业,逐步介入直线集成动作执行器、力觉传感器等关键模块;下游则深入动作训练、场景搭建与具身数据采集。
通过对上下游的战略渗透与横向整合,德马正试图成为具身智能产业链中的“链主型”企业,连接算法、本体、数据与场景,构建一个“可落地、能进化、可协同”的具身智能生态系统。
在这个生态中,本体企业不再是唯一主角。系统集成商、零部件厂商、数据平台方将共同参与,协同演进。
德马构建的这条路径,不一定最耀眼,但或许最踏实。
毕竟真正推动具身智能落地的,往往不是天才的一次闪光,而是一次次在现场“干成一件事”的踏实演进。















